


圖形化三(sān)軸數控加工係統設計
2018-3-16 來源:深圳大學機電與控製 深圳大學廣東教育 作者(zhě):林國勇 徐剛(gāng)
摘要: 針對數(shù)控係統中,低成本以及操作(zuò)簡易的需求,研(yán)發了一種基於 HMI+機器控製器的數控加工(gōng)係統。該加工係統(tǒng)通過在機器控製器內預編常見零件加工程序,並調用在人機界麵上組態的零件圖形結合輸入相關的加工參數,實現對特定類型零件或(huò)者(zhě)零件的特定部位數控加工。另外(wài),該係統(tǒng)可以根據實際需要設置(zhì)不同的(de)零件加(jiā)工參數,隻需一次編程,就能加工出多個(gè)結構相似(sì)的零件,解決(jué)了傳統的數控係統加工前(qián)必須進行 G 代碼生成或者手工編程的問題。表明該係統具有較強可操作性和較高的實用價值。
關鍵詞(cí): 界麵組態; 機(jī)器控製器; 零件圖庫; 運動程序
0 前言
1952 年美國(guó)成功試製了第一台三軸數(shù)控機床,數控係統經過 60 多年的深入研究,其可靠性、實用性和靈活性都得到了(le)不斷改善。隨著(zhe)伺服技術和檢測技術的飛速發展,數(shù)控機床的加工精度也在不斷提高[1]。目(mù)前,國內外主要的數控係統有德國 SIE-MENS 公司 SINUMERIK 係列,日本 FANOC,大連數控和廣州(zhōu)數控等。
這些係統(tǒng)大多采用全閉環控製或(huò)者半閉環控(kòng)製技術,在控(kòng)製(zhì)精度、可靠性、操(cāo)作方便性方麵日趨成熟,已(yǐ)開發並製造了一係列(liè)用途廣(guǎng)功能強大的數控加工設備,得到了廣(guǎng)泛應用。但是(shì),在目(mù)前使用廣泛的(de)數控機床加工設備中,數控係統比較複雜,操作人(rén)員需要具(jù)備一定的機械(xiè)加工知識(shí),並且操作人員需要經過長時間的專業培訓。另外,數控係統的源(yuán)代碼開發程(chéng)度不高,難(nán)以對係統進行二次(cì)開發。
最關鍵的是數控係(xì)統價格昂貴,維護費用高,導致機械技術人員接觸少,無力購買(mǎi) 。文中(zhōng)將傳統機(jī)械加工工藝與現代數字運動控製技術相結合。采用維倫通 MT8101i E 人(rén)機界麵(miàn)與安川MP2310 運(yùn)動控(kòng)製器相結合,創新(xīn)研發了一個用於機床機械加工的經濟型源代碼完全可(kě)以修改(gǎi)、重新配置的開放式數控係統。
本文作者以該係統的開發為例,基於安川運動控製器專(zhuān)用運動控製(zhì)語言,分析構建 “HMI+機器控製器”數控係統的一些關(guān)鍵技術及實現方法。
1、 數控加(jiā)工係(xì)統構建
1. 1 係統概述
圖形化三軸數控加工係統(tǒng)主要(yào)由 HMI+機器控製器組成,再配有 PC 機、輔助操作裝置、伺服驅動器(qì)、交流伺服電機、編碼器和限位開關等組成(chéng)一個模塊化數控係統。係統硬件結構(gòu)組成框圖如圖 1所示。
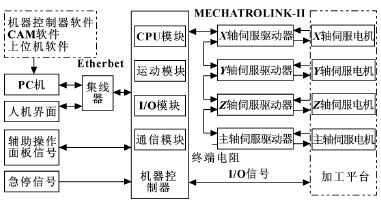
圖 1 數控係統(tǒng)硬件結構組成框圖
PC 機內置有 CAM 作圖軟(ruǎn)件、Easy Builder 組態軟件及 MPE720 程序開發軟件,通過 Ethernet 網絡實現人機界麵圖庫信息與機器控製器內(nèi)運動程序信息互換。輔助操(cāo)作麵板作用是調節各運動(dòng)軸伺服(fú)電機的正向或(huò)反(fǎn)向運動,點動或(huò)步進運動(dòng),便於零件加工前的快速分中對刀操作(zuò)。
利用操作麵板上的按鈕發出脈衝信號控製(zhì)伺服電機運動,代替了傳統數控機床(chuáng)的手輪,簡化係統編程,也節約了設備製造(zào)的成本。機器控製器為(wéi)係統的核(hé)心部件,采用安川(chuān) MP2310 運動控(kòng)製器,通過 hECHATROLINK-Ⅱ通信協議對伺服(fú)驅動(dòng)器發送指令,實現順控(kòng)、運動控(kòng)製、數據設定、狀(zhuàng)態監視(shì)和參數調試等操作任務。MP2310 控製器最多(duō)支持16 軸插補,其專用(yòng)的運動語言可(kě)以進行循環、跳轉、條件分支(zhī)、選擇執行和並列(liè)執行等控製命令編程。
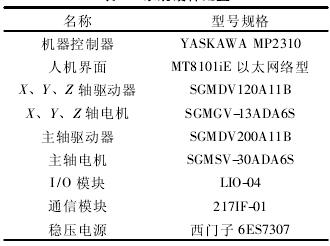
此外,MP2310 還具有強大的 PLC 梯形圖編程功能(néng)。係統硬件配置(zhì)如表 1 所示。
表 1 係統硬件配(pèi)置
1. 2 硬件電路(lù)設計
三軸數控加工係統硬件電路圖如圖 2 所示。係統X、Y、Z 和(hé)主軸電機(jī)控製采用 YASKAWA 公司生產的∑-V 係列中容量(liàng)、中(zhōng)慣量交流伺服電機,分別配以 MECHATROLINK-Ⅱ通(tōng)信指令型伺(sì)服控製單。通信指令型(xíng)伺服控製器除了可以進行速度、轉矩和位控製,還可實(shí)現高精度的同步相位(wèi)運動控製。各運動軸伺服控製單(dān)元通過 MECHATROLINK-Ⅱ網絡(luò)連接(jiē),可以實時快速收發各種控製信息(xī)。
伺服(fú)控製器(qì)I / O 端口 POT、NOT 和 DEC 引腳分別接入組合開關,接收運動平台限位、原點複歸等開(kāi)關量信號。伺服單元主回路為交流 220 V 輸入,並且在主電路設(shè)計安(ān)裝過、
浪湧抑製和噪聲濾波等保護裝置。另外,控製電路中設計了異常情況緊急停止運行電路,具體工(gōng)作原理如下: ALM-端口為低電平,繼電器 KA1 得(dé)電閉合(hé),從而接(jiē)觸(chù)器 KM2 閉合,係統(tǒng)正常(cháng)工作。
當任意運動軸伺服控製器出現異常時,ALM +端(duān)口為高電平,此(cǐ)時繼電器 KA1 失電釋放,從(cóng)而接觸(chù)器 KM2 切斷(duàn)控製器主電(diàn)路,實現電機的緊急停止,同時觸發聲光報警裝置。
按下按鈕 SB2 則可以解除當前報警(jǐng)。
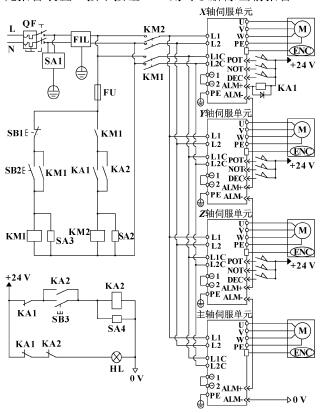
圖 2 三軸數控加工係統硬件電路圖
2、 軟件設計
圖形化(huà)三軸數控加(jiā)工係統采(cǎi)用 “HMI+機器控製器” 為 平 台, 選 用 維 倫 通 Easy Builder 和 安 川(chuān)MPE720 作為軟件開發工具。對(duì)係統進行 PLC 程序設計、人(rén)機界麵設計和運動(dòng)程序設計。軟件設計流程圖如圖 3 所(suǒ)示(shì)。
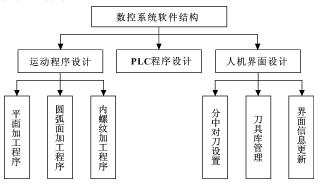
圖 3 軟件設計流程圖
2. 1 數控加工係統主界麵設計
基於維倫通組態(tài)軟件 Easy Builder Pro4. 10. 04,對數控(kòng)係統上位機操作主界麵進行設計。數控係(xì)統上位(wèi)機主(zhǔ)界麵如圖 4 所示。

圖 4 上位機係統主界麵
係統的人(rén)機界麵主要包括界麵操作、實時信息顯(xiǎn)示、窗口界麵管理和參數設置等四大功。
( 1) 界麵操作功能: 利用組態軟件編程,將傳統數控操作麵板虛擬化,實現對係統伺服的啟動 /停止,數控係統的操作模式選擇,各運動軸的點動(dòng)、步進、連續運行,實現精準分中對刀操作,代替傳統數控機床使用手輪進(jìn)行分中對刀的功能。
( 2) 實時信息顯示功能: 主要包括(kuò)屏(píng)幕的操作信息、狀態信(xìn)息、係(xì)統故(gù)障報警信(xìn)息和各(gè)軸坐標信息(xī)等的顯示(shì)功能。
( 3) 窗口界麵管理功能: 主(zhǔ)要包括零件的分中(zhōng)界麵、換刀界麵、螺紋加工界麵、幫助信息界麵、機(jī)床參數界麵、零件圖(tú)庫界麵和加工圖形界麵。
( 4) 參數設置功能: 在進(jìn)行數控加工時,需要預先設置控製係統的相關參數和工作狀態。
例如機(jī)床的主軸(zhóu)轉速、進給速度、刀具直(zhí)徑、毛坯件的分中坐標、圖庫(kù)零件的目標尺寸和加工進刀量等參數設置。
2. 2 圖庫管理界麵設計
人機界麵和機器控(kòng)製器作為係統中的主控元(yuán)件,在(zài)人機界麵內組態出零件圖庫,零件圖庫中預先(xiān)保存有各種常見的零件加工信息(xī),包(bāo)括零件尺寸信息、進刀量刀(dāo)具信息等(děng)。確定零件的加工工藝方案後,在零件(jiàn)圖庫中尋找相應(yīng)的圖形零件,圖形零件符合加工圖樣要求,設置相應的加工(gōng)參數。如果圖庫中沒有加工圖樣的零件,則需要通(tōng)過(guò)使用(yòng) PC 機內置有 CAM 作圖軟(ruǎn)件、Easy Builder 組態軟件及 MPE720 運動程序編程軟件,編寫加工程序,並生(shēng)成新的零件圖形。
為防止因參數(shù)設置不當而可能出現走刀軌跡錯誤(wù),在啟動加工前需要進行加工幹涉檢查,隻有在(zài)幹涉檢查通過才能啟動程序(xù)進行加工。零件圖庫管理流程圖如圖5 所示。
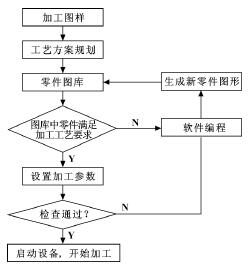
圖 5 圖庫管(guǎn)理流程圖(tú)
在正確設置待加工零(líng)件的尺寸(cùn)信息和加工參數信息,係統檢查通(tōng)過後,即可在零件(jiàn)圖庫中調出待零件圖。零件圖設計界(jiè)麵如圖 6 所示。
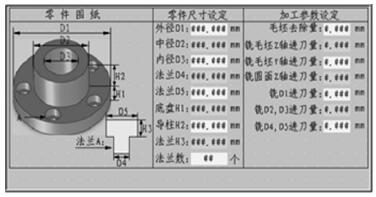
圖 6 待加工(gōng)零件圖界麵
2. 3 圖形化三軸數控加工(gōng)係統軟件編程
MP2300 係(xì)列機器控製器(qì)包括梯形圖程序和運動程序兩種程序方(fāng)式,通過組合這兩種程序(xù)方式進行運動控。圖形化三軸數控(kòng)加工(gōng)係統運(yùn)動程序編程分為切削加工編程和螺紋加工編程兩種。
2. 3. 1 切削加工
平麵 ( 圓弧(hú)麵) 加工首先需要進(jìn)行參數設置檢查,通過比較零件尺寸參數寄存器與加工參數(shù)寄存器中的數值大小,確定進(jìn)行自動(dòng)加工的初始(shǐ)條件。當輸入零(líng)件(jiàn)尺寸參數小於加工參數時,係統狀態信息顯示(shì)報警,係統(tǒng)無法啟動(dòng)加工,這樣能有效避免誤操作引起錯誤走刀。切削加工算法流(liú)程圖如圖 7 所示。
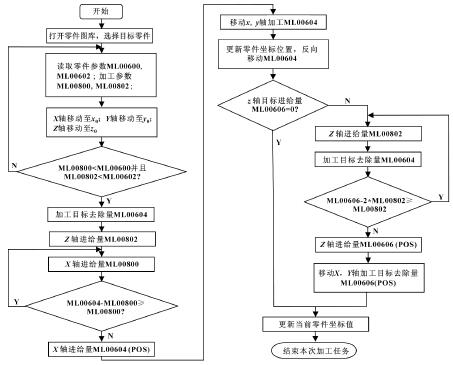
圖 7 切削加工算法流程圖
零件的尺寸值、加工進刀量和刀具直徑(jìng)等數據均放在程序中指定的寄存(cún)器裏,係統執行時直接讀(dú)取寄(jì)存(cún)器中的數據,通(tōng)過這(zhè)種(zhǒng)方法,並且利用 MPE720 程序開發語言如循環、跳轉、條件分支、並列執行、選(xuǎn)擇執行和分支等(děng)控製命令編程,實現複(fù)雜的運動軌跡(jì)編程。限於(yú)篇幅,以下列出幾條(tiáo)編(biān)程語句,利用圓弧插補命令,實現圓弧(hú)麵切削加工任務。
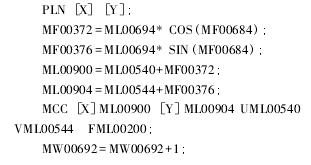
加工之前,隻需在對應(yīng)的寄存器內輸入(rù)相關參數,通過調用程(chéng)序塊即(jí)可實現加工,使得編程簡單、靈活
。
2. 3. 2 螺紋(wén)加工
為使設備操作更具有實(shí)用性,設置了手動加工和自(zì)動加工兩(liǎng)種螺紋加工模式。螺紋加工(gōng)操作界麵如圖8 所示。
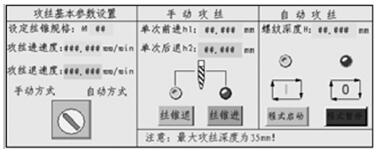
圖 8 螺(luó)紋加工操作界麵
通過對 Z 軸(zhóu)和主(zhǔ)軸進行插補,實現螺紋加工,主要編程程序語句如下:
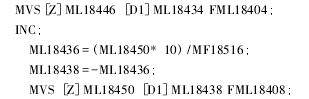
係統處在螺紋加工模式(shì)下,主軸的點動、步進等(děng)功能被(bèi)限製,以確保係統(tǒng)的安全性。
3 、結論
基於 HMI 與(yǔ)機器控(kòng)製器的三軸(zhóu)數控加工係統,通過調用人機界麵上的(de)零件圖形,設置(zhì)加工參(cān)數,即可對(duì)待(dài)加工毛坯件進行分中對(duì)刀操作,自動加工(gōng)出目標零件。解決了那(nà)些沒有經(jīng)過嚴格的數控專業培訓,不具備 Pro/E、UG、Mastercam 等圖形(xíng)處理能(néng)力的人員使用數控設備進行加工的(de)瓶頸問題,具(jù)有較強可操作性(xìng)和較高的實用價值。
投(tóu)稿(gǎo)箱:
如果您有機床行業、企業相關新聞稿件發表,或進行(háng)資(zī)訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行(háng)資(zī)訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相(xiàng)關(guān)信息

業(yè)界(jiè)視(shì)點
| 更多

行(háng)業數據
| 更多
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分地區(qū)金屬切削機床產量數據
- 2024年(nián)11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新能源汽(qì)車產量數據
- 2024年11月 新能源汽(qì)車銷量(liàng)情況
- 2024年10月 新(xīn)能源汽車產量數(shù)據
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切削(xuē)機床(chuáng)產(chǎn)量數據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產(chǎn)量(liàng)數據
- 2028年8月 基本型乘用車(轎車)產量數據
博文選(xuǎn)萃
| 更多