


電火花數控插補(bǔ)器的設計
2017-8-11 來源:河南(nán)理工(gōng)大學 機械及工程動力學院 作者(zhě):劉石安 劉建慧 童(tóng)景(jǐng)琳
摘 要: 論文分析了逐點比較法可回退的直(zhí)線、 圓弧插補算法, 用硬件描述(shù)語言 HDL 編程, 實現了插補算(suàn)法硬件化, 計算迅速(sù), 幾乎不消耗時(shí)間, 完全能滿(mǎn)足數(shù)控係統的實時(shí)性(xìng)要求, 已成功應用於電火花數控係統中(zhōng)。
關鍵詞: 電火花; 數控; 插補
引言
電火花數控係統最主要的實時任務是插補運算、運動規劃和電火花加工間隙狀態(tài)檢(jiǎn)測與控製。插補運算是為了精確(què)計算(suàn)出各個運動軸(zhóu)的移動量,確保工(gōng)具(jù)電極按預定的軌跡路線運行;運動規劃是為了解決工具電極移(yí)動(dòng)時可能存在的不平穩現象,比如空運(yùn)行到放電加工時,間隙短路狀態到快速回退時,都要有(yǒu)與電火花加工相適應的變速方(fāng)法; 間隙狀態(tài)檢測與控製是(shì)電火花加工工藝本身要(yào)求的,是必須(xū)實(shí)時的。其中插補運算在每一個(gè)控製周期內都必須進行核算,它的實時性能(néng)直接(jiē)影響整機係統性能(néng)。目前數控係統主要有(yǒu)兩種方式,一是(shì)全軟件方式,二是軟件硬件結合方式。 插補算法用(yòng)軟件實(shí)現的數控係統升級換代容易,但速度要慢一些,係統實時任務總數不能多,還需要實時操作係(xì)統支持;用硬(yìng)件設計插(chā)補(bǔ)器能獲得良好(hǎo)的實時性能,插補器運(yùn)行時不占用微處理器時間,是並行運行的,在分時操作係統中也可以運行。目前插補器硬(yìng)件化(huà)的研究也比較深入,多數用嵌入式係統實現,主要應用於數控銑削或雕(diāo)銑。 電火花加工工藝很特別 ,放電時工具電極不能再進(jìn)給,因此電火花數控係統必須(xū)考慮軌跡可回退,必須研究軌跡可回退的插補算法。
模具加工離不開電(diàn)火花加工工藝,據統計有 30%的模具加工(gōng)工作量是用電火花加工工藝完成的(de), 許多國外的機床製造商,如阿奇、夏米爾公司,把電火花加工和(hé)高速數控銑削結合起來,組(zǔ)合成新的工藝係統,降低(dī)單件成本,縮(suō)短生產流程時間,從而增強企業的競爭力。 根 據蘇州長風數控科技公司的市場調查表明,數控電火花機床的需求在增長(zhǎng),工藝範圍在拓寬,如用多軸聯動數(shù)控電火花加工技術完成聚晶金剛(gāng)石刀具(jù)加工的, 由 此(cǐ)可見(jiàn) , 電火花加工工藝潛(qián)能還在,優(yōu)勢的發揮取決於數控技術、智能技術和其它各項技術的研究與應用的深化。
本文在(zài) Windows 環境下生成了 C 語言的可回退的軟件插補器,運行時消耗時間比較多,估(gū)計在(zài) 150μs 左(zuǒ)右,再(zài)者電腦操作係統又是分時的(de), 也降低了電火花數(shù)控(kòng)係統的實時性能,因此本文致力於插補器硬件化研究,用硬件(jiàn)描述語言 HDL 生成, 在 Altera 公司(sī) EP1C12Q240C8 可編程邏(luó)輯器件中實現, 在集(jí)成開發環境 Quartus Ⅱ EDA 工具下開發硬件插補器控(kòng)製軟件, 本文的中心(xīn)論述點就(jiù)集(jí)中在可(kě)回退插補器的計算方法及其(qí)硬件化方麵。
1 .電火花數(shù)控插(chā)補器(qì)設計
軌跡可回退,是(shì)指放電加工時工具電極按原來路徑相反的方向,並沿原來前進時的(de)腳(jiǎo)步絲毫不差(chà)的沿途返回,係統選擇脈衝增量法比較適宜, 本文用逐點比較法分析直線插(chā)補和圓弧(hú)插補:
1.1 直線(xiàn)插(chā)補器
圖 1 表示可回退直線插補示(shì)意圖。 在第(dì)一象限中細實線部分代表正(zhèng)常直線插補時坐標點密化方法,當(dāng)坐標
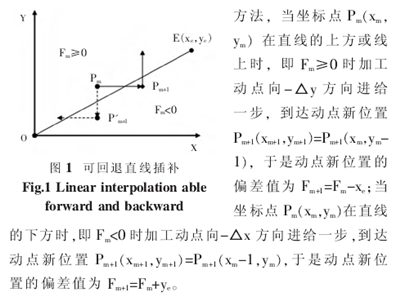
在第二象限、第三和第四象限中的直線插補(bǔ),由於與X 軸或(huò) Y 軸或 y=x 軸對稱,所以各(gè)個象限中的(de)偏差計算方法都可以(yǐ)按第一象(xiàng)限計算方法(fǎ)處理, 終點坐標取絕對值,隻是進給方向做適當調整即可,四個象限(xiàn)的可回退直線插補方(fāng)法中的坐標進給和偏差計算(suàn),歸納起來如表 1 所示。
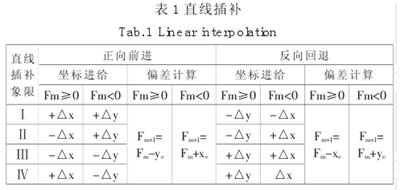
插補到(dào)了直線(xiàn)的終點;當 JX=|xe| 或 JY=|ye| 時表示直線插(chā)補在中途返回到了直線的起點了。
根據以上思路,本文用硬件描(miáo)述語言 HDL 設計了可回退直線插補器,四個象限(xiàn)的直線插補均可生成,圖 2 表示了直線插補仿真波形,終點坐(zuò)標為第四象限點 E(xe,ye)=E(4,-3),軌跡從正向(xiàng)前進到中(zhōng)途拆返(fǎn) ,再反向回退 ,最後回到直(zhí)線起點的直線插補(bǔ)全(quán)過(guò)程。
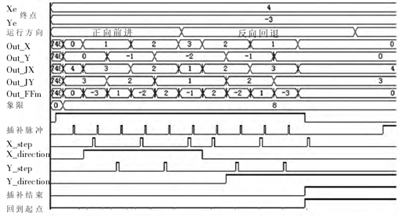
圖 2可回退直線插補仿真波形
Fig.2 Simulation waveform of line interpolation able forwardand backward
1.2 圓弧插補器
圖 3 表示(shì)可回退圓弧插補示(shì)意(yì)圖,由於插補對(duì)象是圓,順時針和(hé)逆時針互為反(fǎn)向, 因此可回退圓弧(hú)插(chā)補偏差計算方法可以簡化,相應的計算原(yuán)則是,當實際軌跡(jì)為順(shùn)圓SR1 時可回退(tuì)偏差判別式按逆圓弧計算,當實際軌跡為逆圓 NR1 時可回退偏(piān)差判別式按順圓弧 SR1 計算。
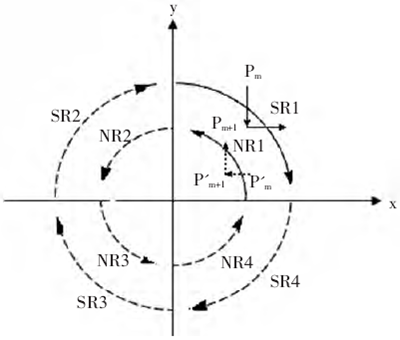
圖 3四個象限的插補可回退圓弧插(chā)補(bǔ)
Fig.3 Four quadrant circular arc interpolation able forwardand backward
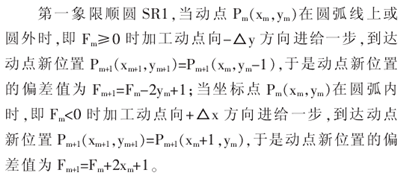
第一象限逆(nì)圓 NR1,當動點 Pm(xm,ym)在 圓弧線上或

與(yǔ)直線插補相似,圓弧插補(bǔ)計算按坐標絕對(duì)值進行,進給方向的判定另做處理,那麽 NR2、SR3、NR4 都可以按(àn)第一象限順圓 SR1 來計(jì)算,SR2、NR3、SR4 都可以按第一象限逆圓 NR1 來計算(suàn),主要計算偏差值、進給方向、增或減 JX、JY,以及設置狀態標(biāo)誌(zhì),如圖 4 所示。
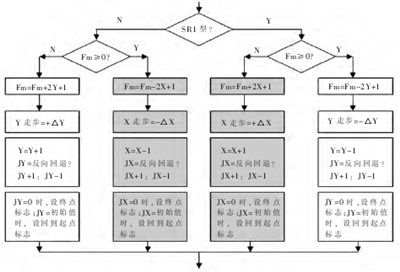
圖 4可回退圓弧插補程序流程圖
Fig.4 The program flow chart of circular interpolation ableforward and backward
終點判別類同於直線終點判(pàn)別法,當 JX 和 JY 同(tóng)時為零時表示該圓弧插補到了圓弧的終點 ; 當 JX=|xe| 或JY=|ye| 時表示圓(yuán)弧 插補(bǔ)在中途拆(chāi)返 ,反(fǎn)向回退(tuì)到(dào)了圓弧的起點了。
同樣根據以上思路,本文用硬件描述(shù)語言 HDL 設計了(le)可回退圓弧插補器,四個(gè)象限的圓弧插補均可生成,編(biān)程時使用了數(shù)字狀態機,用狀態機控製流程,其中部分圓弧插(chā)補器 HDL 程序如(rú)下:

圓弧插補仿真波形如圖 5 所示,表示第一象限順圓圓弧插補仿真,起點坐標為,終點坐標為時,軌跡從正向前進到中途拆返,再反向回退(tuì),最後回到圓(yuán)弧起點的插補(bǔ)全過程。
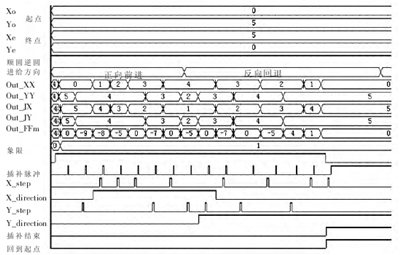
圖 5可(kě)回退圓弧插(chā)補仿真波形
Fig.5 Simulation waveform of circular interpolation ableforward and backward
2 .結束(shù)語
(1)分析了逐點比較法可回退的直線(xiàn) 、圓弧插補算法 ,用硬件描述語言 HDL 編程,實現了(le)插補算法硬件化(huà)。
(2) 對(duì)硬(yìng)件插補器模塊進行了功能仿真和時序仿真 ,圖 2 和圖 5 的時序仿真,說明了本文建立的硬件可回退插補器能夠正確的沿直線或圓弧軌跡插補(bǔ)前進,同(tóng)時也(yě)能精確的沿原軌跡路線返回,此特征能充分滿足(zú)放電加工時工具電極的進退需要,這是電火花數控技術的基本要求。
(3)本文研製的硬件(jiàn)插補器 , 運算速度快 , 每次運算消耗時間隻有 15~19 個(gè)機器周期, 即對於 33.333MHz 微處理器,隻需時(shí)間 0.5~0.7 微秒,因此具有良好的實(shí)時性。
(4)本文設計的硬件化可回退插補器 ,是在 EP1C12Q240C8 可編程邏輯器件中實現的(de) , 直線插補器占用 1006個邏輯單(dān)元(yuán),圓(yuán)弧插補器占用 1367 個邏輯單元,模塊工(gōng)作頻率分別可達 100MHz、77MHz,說明占用資(zī)源少,經(jīng)濟性好,工作頻率高。
投稿箱:
如果您有機床行業、企業相關新聞稿件發(fā)表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發(fā)表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業界視點
| 更多

行業數據(jù)
| 更(gèng)多
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分地區金屬切削機床產量數據
- 2024年11月 軸承出口情況
- 2024年11月(yuè) 基本(běn)型乘用車(轎(jiào)車)產量數據(jù)
- 2024年11月 新能源汽車產量(liàng)數據
- 2024年11月(yuè) 新能源汽車銷量情況
- 2024年10月 新能源汽車產量數據
- 2024年10月 軸(zhóu)承出口情況
- 2024年10月 分地(dì)區金屬切削機床產量數據
- 2024年10月(yuè) 金屬切削(xuē)機床產量數據
- 2024年9月 新能(néng)源汽車(chē)銷量情況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本型乘用車(轎車)產(chǎn)量數(shù)據
博文選萃
| 更多
- 機(jī)械加工過程圖示
- 判(pàn)斷一台加工中心(xīn)精(jīng)度的幾種辦法
- 中走絲線切割機床的發展(zhǎn)趨勢
- 國產數控係統和數控機床何去何從?
- 中國的技術工人(rén)都(dōu)去哪裏了?
- 機械老板做了十多年,為何還是小作坊?
- 機械行業最(zuì)新自殺(shā)性營銷,害人(rén)害己!不倒閉才
- 製(zhì)造(zào)業大逃亡
- 智(zhì)能時代,少談點智(zhì)造,多(duō)談點製造(zào)
- 現實(shí)麵前,國人沉默。製造業的騰飛,要從機床
- 一文搞懂數控車床加工刀具補償功能
- 車床鑽孔攻螺紋加工方法及工裝設(shè)計(jì)
- 傳統鑽削與螺旋銑孔加工工藝的區別