



含(hán)冗(rǒng)餘驅動支鏈4-UPS&UP 並聯機構的運動學性能分(fèn)析
2017-1-4 來(lái)源:天津大(dà)學機(jī)構理論與裝備設計教育(yù)部重(chóng)點實驗 作者:董成林 劉海濤 黃 田
摘要:分析含冗餘驅動支鏈4-UPS&UP 並聯機構(gòu)的運動學性能,該並聯機構由著名的Tricept 機器人並聯模塊(kuài)3-UPS&UP 機構增加一條無(wú)約束驅動支鏈所得。因冗餘(yú)驅動支鏈的引入(rù),該(gāi)並聯機構比3-UPS&UP 機(jī)構擁有(yǒu)更高的承載能(néng)力(lì)和更(gèng)好的靜、動態性能。在建立 4-UPS&UP 機構的(de)位置逆解模型(xíng)和7 ? 6廣義雅可比矩陣的基礎上,得(dé)到驅動關節速度到動平台參考點線速(sù)度(dù)的4? 3量綱一雅可比矩陣,並據該矩陣的條件數提出局部運動(dòng)學性能評價指標。最後,在同(tóng)尺度下對 4-UPS&UP 和3-UPS&UP 並聯(lián)機構的運動學性(xìng)能進行(háng)了對比分析,得到(dào)前者運動學性能優於後(hòu)者的(de)結論。
關鍵詞:並(bìng)聯機構;冗餘驅動;運動學性能
0.前言
為了滿足複雜工況需求,要求工業(yè)機器人(rén)驅動關(guān)節的數目大於完成任務所需的自(zì)由度數。此(cǐ)類機器人被稱為冗餘(yú)機器人,包括運動(dòng)冗餘和驅動(dòng)冗餘兩大類[1-2]。運動冗餘通過添加額外的驅動關節以增加機構運動自由度,能夠有效避(bì)免機構奇異、增大工(gōng)作空間[2],主要用(yòng)於串聯機器人;而驅動冗餘(yú)隻增加驅動關節的個數,不改變機構的自由(yóu)度,能有效地提高機器人的承載能力並獲得較好(hǎo)的靜、動態性能[1,3-4],廣泛應(yīng)用於並聯機器人。並聯機器人的驅動冗餘通過兩種方式實現:① 在不改變原機構結的基礎上,增加支鏈中主(zhǔ)動關節數目,使其大於機構(gòu)自由度數(鏈內冗餘);② 在原機構中增加至少一條額外的驅(qū)動支鏈(支鏈冗餘)[2]。第一種方式構造簡單,但易破壞原有機構的對稱性,因此第二(èr)種方式較為常見[5]。受此啟發,為進(jìn)一步提高Tricept 混(hún)聯機器人[6-7]的承載能力、剛(gāng)度以及動態特(tè)性,克服其在臥式布局應用中受重力場影響,導致的驅動支鏈受力不均、電機力矩過載(zǎi)等問題,提出在(zài)其並聯模塊3-UPS&UP 機構的基礎上,通過增加一條無約束主動支鏈(UPS) 得到含冗餘驅動支(zhī)鏈的(de)4-UPS&UP 機構,如圖1 所示。
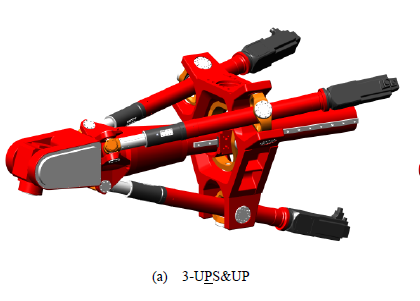
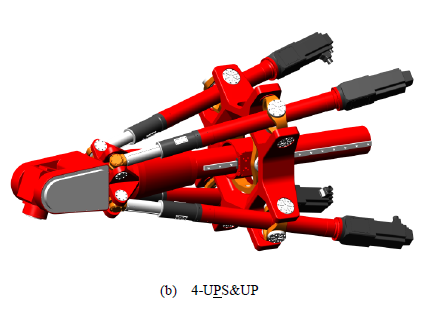
圖1 分別以3-UPS&UP、4-UPS&UP 機構為主模塊的混聯機器人
運動學性能分析是並聯機構設計的基本(běn)環節(jiē)之一,其關鍵是選擇合適的性能評價指標。目(mù)前,構建並聯機構運動學性能評(píng)價指標的方式主要(yào)有(yǒu)兩種(zhǒng)。一是利用速度雅可比矩陣的代(dài)數特征,如行列式、條件數、奇異值(zhí)等。值得注意的是,對於存在平動與轉動自由(yóu)度耦(ǒu)合的並聯機(jī)構,雅可比矩陣中各項的物理量綱(gāng)不一致[8],因而不能直接用其代數(shù)特征構造性能評價指標,需要首先對雅可比矩陣進行量綱歸一化處理。針對該問題,ANGELES 等[9-10]提出了特征長度法。此外,還可選用動平台上若幹特征點的(de)線速度表征機構末端操作速(sù)度,建(jiàn)立其與驅動速度間的映射模(mó)型[11-12],進而(ér)得到量綱一致(zhì)的雅可比矩陣。二是借助(zhù)螺旋理論(lùn),基於虛係數[13]概念構建性能評價指標,如傳遞指(zhǐ)標[14-15]、傳遞率[16-19]等(děng)。此(cǐ)類指標利用(yòng)實際的(de)傳遞功率與理論上可能的最大傳遞功率之比(bǐ)作為評價機構運動/力傳遞特性的優劣,具有量綱一致的特點。
本(běn)文以含冗餘驅動支鏈的(de)3 自由(yóu)度4-UPS&UP並聯機構為對象,在構建(jiàn)位置逆解模型和(hé)廣義雅可比矩陣的基礎上,以末端參考點的線速度為獨立坐標,建(jiàn)立此機構(gòu)的(de)量綱一雅可比矩陣,進而利用該雅可比矩陣的條件數作為局部性能評價指標,通過算例(lì)在同尺度下分析比較該機構與3-UPS&UP並(bìng)聯(lián)機構的運動學性能,其(qí)目的在於初步論證該方案的可行(háng)性,以明確後續結構參數設計及承載能力、剛度、動態特性對比分析的必(bì)要性。
1.機(jī)構描述與坐標係(xì)建立
圖(tú)2 示出了(le)4-UPS&UP 並聯機構的結構簡圖。該機構(gòu)由靜平(píng)台(tái)、動平台以及(jí)與相連它們的四條無約束主(zhǔ)動(dòng)UPS 支鏈和(hé)一條恰(qià)約束UP 支鏈組(zǔ)成。在此,U、P、S 分別表示虎克鉸、移動副和球鉸; P表示主(zhǔ)動移動副。機構(gòu)中的UPS 支鏈一端通(tōng)過虎克鉸和靜平(píng)台連(lián)接,另端通過球鉸與動平台相連;UP支鏈一端通過虎克鉸和(hé)靜平台連接,另端與動平(píng)台固接,進而使得動(dòng)平台僅能(néng)作繞(rào)虎克鉸兩正(zhèng)交回轉軸線的轉動,以及相對虎克鉸內圈的(de)移動。易見,該(gāi)3 自由(yóu)度機構具(jù)有四個驅動關節(P 副),因此屬冗餘驅動並聯機構。此外,為了提高該機構的姿態能力,可以根據不同的應用需求在UP 支鏈末端串接2~3 自由度轉頭,進(jìn)而實現末端執行器(qì)5~6 自(zì)由度空間運動,如圖(tú)1b 所示。
如圖(tú) 2 所示,令點(diǎn)Bi和 Ai ( i =1 ~ 4 )分別表示第i 條UPS 支鏈中虎克鉸和球(qiú)鉸中心,二者分(fèn)別構成正方形?B1B2B3B4和(hé)?A1A2A3A4;點B表示 UP 支鏈連架虎克(kè)鉸中心,且與?B1B2B3B4中心重合;點 A為UP 支鏈軸線與?A1A2A3A4 所在(zài)平麵交點(diǎn),且與?A1A2A3A4中心重合;UP 支鏈軸線與?A1A2A3A4所在平麵垂直;末(mò)端參考(kǎo)點(diǎn)P 為UP 支(zhī)鏈軸線延長線上的一點。在?B1B2B3B4所在平麵內,以點B為原點建立(lì)參考坐標係Bxyz ,其中y 軸(zhóu)與UP 支鏈連架虎克鉸軸線重合;z軸與(yǔ)?B1B2B3B4所(suǒ)在平麵垂直;x 軸滿足右手定則。為(wéi)描述UP 支鏈姿態,在末端參考點P 建立連體係Puvw,其中(zhōng)u 軸與UP 支鏈連架虎克鉸(jiǎo)內圈軸線重合; w 軸與該支鏈(liàn)軸線重合,且由點B 指向點P ; v 軸滿足右手定則。於是(shì),係Puvw相對係Bxyz 的姿態(tài)可通過首先繞連架虎克鉸近架軸y 軸旋轉角? ,然後繞遠架軸u 軸旋轉角來(lái)描述。據此,係Puvw相對係Bxyz 的姿態矩陣可表示(shì)為(wéi)
此外,根據4-UPS&UP 並聯機構結構特點,定義其任務空間Wt為(wéi)一半徑為R,高為h的圓柱體,並定義點B至(zhì)Wt的最(zuì)小(xiǎo)距離(lí)為H (見圖 2)。
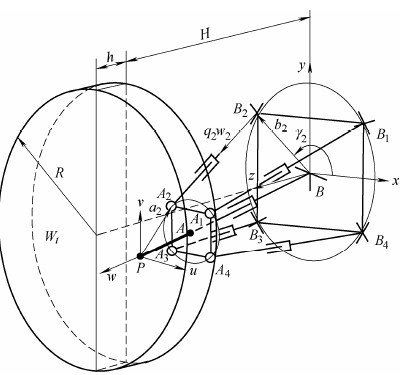
圖2 4-UPS&UP 並聯機構結(jié)構(gòu)簡圖
2.運動學逆解分析
2.1 位置逆解
4-UPS&UP 並聯機構(gòu)位置逆解(jiě)分析可歸結為已知機構尺度參數和點P 位置矢(shǐ)量,求解動平台姿態(tài)和各(gè)UPS 支鏈中驅(qū)動關節長度的問題。
式中,J 為7? 6矩陣,被定義為 4-UPS&UP並聯機構的廣(guǎng)義雅可比矩陣[20];其中,Ja 被稱為驅動雅可比矩陣, Jc 被稱為(wéi)約束雅可比矩陣。將其與3-UPS&UP 機(jī)構的雅可比(bǐ)矩陣進行對比,發現兩機構的Jc相(xiàng)同、Ja 不同。可見,冗餘驅動支鏈(UPS)的(de)引入僅改變了3-UPS&UP 機構的驅動特性,對其約束特性無影響。
3.運動(dòng)學性能評價
3.1 運動學(xué)性能指標

3.2 算例
現以Tricept 605 中並聯模塊3-UPS&UP 機構為參考對象(尺度參數見表1),在相同(tóng)尺度參(cān)數及任務空(kōng)間下,對比分(fèn)析本文提(tí)出的4-UPS&UP 機構與3-UPS&UP 機構的運動學性能。圖(tú) 3 示出了在兩(liǎng)種機構在任務空間Wt 中z ? H 、z ? H ? 0.5h以及z ? H ? h三個(gè)截麵內? 的分布。由圖可見(jiàn),對於4-UPS&UP 機構和3-UPS&UP機構,? 均隨Wt徑(jìng)向和(hé)軸向(xiàng)尺寸的增加而單調增(zēng)大;且前者呈空(kōng)間四(sì)對稱分布,後者呈空間三對稱(chēng)分布。
表1 Tricept 605 基本尺度參數 m
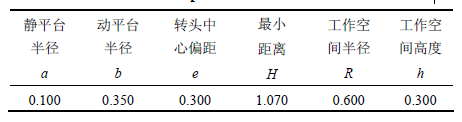
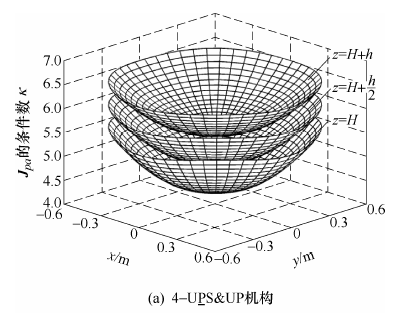
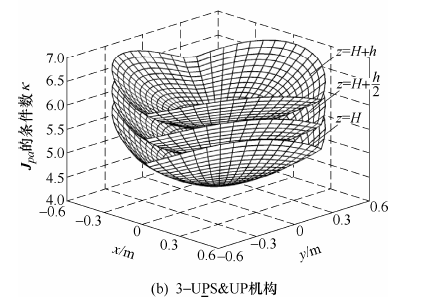
圖 3 k在Wt 中的分布情況
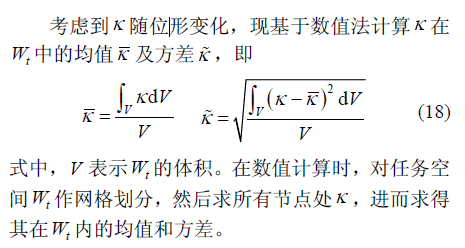
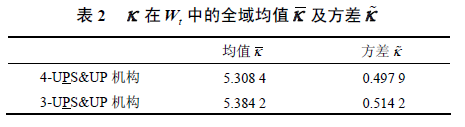
表2 給出了兩種(zhǒng)機構? 及?? 的數值計算結果(guǒ)。由表2 可見,4-UPS&UP 並聯機構? 的全域均值和標準差均略(luè)低於3-UPS &UP 並聯機構。若選取? 在Wt 中的均值? 及方差?? 作為全域運(yùn)動學性能指標[22],計算結果表明4-UPS&UP 機構的全域運動(dòng)學性能(néng)優於3-UPS&UP 機構。
以上分析表(biǎo)明,含(hán)冗餘驅動支鏈4-UPS&UP 並聯機構的運動學性能優(yōu)於同尺度下的3-UPS&UP 並(bìng)聯(lián)機構。
4.結論
本文提出了一種新(xīn)型3 自由度(dù)冗餘驅(qū)動並聯機構(gòu)——4-UPS&UP,研究了該機構的位置逆解與速度建模問題,以末端參(cān)考點的線速(sù)度為獨立坐標構建了該機構的量綱一(yī)雅可比矩(jǔ)陣,據此提出以該矩陣的條件數? 作為局部運動學性能評價指標,並在同尺度下對比分析了該機構與(yǔ)3-UPS&UP並聯機構的運動學性能,得到(dào)如下結論。
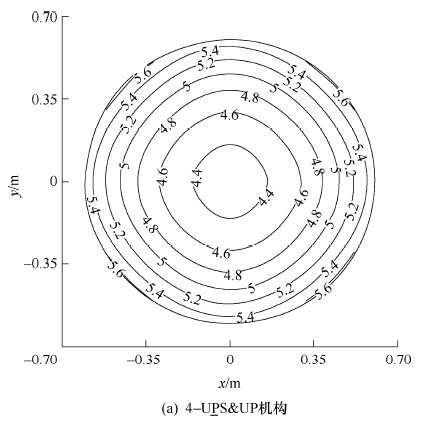
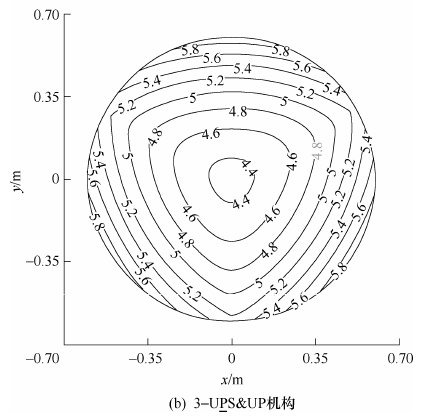
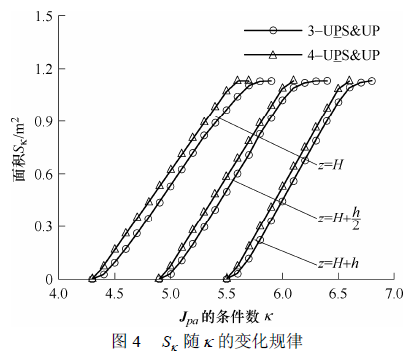
圖 5 ?k 在Wt 上截麵的等高線(xiàn)分布
(4) 綜(zōng)上所述,冗餘驅動支鏈的引入有助於提高(gāo)3-UPS&UP 機構的運(yùn)動學性能,其對(duì)靜、動態特性影響的定量分(fèn)析將在後續的研究工作中開展。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合(hé)作,歡迎聯係本網編(biān)輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合(hé)作,歡迎聯係本網編(biān)輯部, 郵箱:skjcsc@vip.sina.com
更多相(xiàng)關信息

業界視點
| 更多

行業數據
| 更多(duō)
- 2024年11月 金屬(shǔ)切(qiē)削機床產量數據
- 2024年11月 分地區金屬切削機床產量數據
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎(jiào)車)產量數據
- 2024年11月 新(xīn)能源汽車產量數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新(xīn)能源汽車產量數據
- 2024年10月 軸承出口(kǒu)情況
- 2024年10月 分地(dì)區金屬切削機床產量數據
- 2024年10月 金(jīn)屬(shǔ)切削機床產(chǎn)量數(shù)據
- 2024年9月 新(xīn)能源汽車銷量情況
- 2024年8月 新(xīn)能源汽車產量(liàng)數據
- 2028年8月 基(jī)本型乘用車(轎車)產量數據
博文選萃
| 更多
- 機械(xiè)加工過程圖示
- 判斷一台加工中心精度的幾種辦法
- 中走(zǒu)絲線切割機床的發展趨勢
- 國產數控係統和數控機床何去何(hé)從?
- 中國的技術工人都去(qù)哪裏了?
- 機械老板做了(le)十多年,為何還是小作坊?
- 機(jī)械行(háng)業(yè)最新自殺性營(yíng)銷,害人害己!不倒閉才(cái)
- 製造業大逃(táo)亡
- 智能(néng)時(shí)代,少談點智(zhì)造,多談點製造
- 現實麵前,國人沉默。製造(zào)業的騰(téng)飛,要從機床
- 一文搞(gǎo)懂數控車床加工刀具補償功能
- 車床鑽孔攻螺(luó)紋加工(gōng)方法及工裝設計
- 傳統鑽削與螺旋銑孔加工工藝的區別