



不確定機器臂係統的魯棒追蹤控製設計
2016-10-13 來源(yuán):常州大學 作者:陳嵐萍,馬正華,薛國新
摘要:針對機器臂的不確定動力學參數和外部未知幹(gàn)擾,提出(chū)了一種自適應雅格比追蹤控製策略,運(yùn)用李亞普諾夫方法及(jí)滑模控製來加(jiā)強係統的(de)漸進穩定性,可使機(jī)器臂末端裝置的運動誤差漸進收斂到零。仿真結果表明,該控製器運用於二自由度機器臂具有較好的魯棒性和動態性(xìng)能(néng)。
關鍵詞:魯棒性;雅(yǎ)各比(bǐ)追蹤控製;滑模控製;機器(qì)臂控製;不確定性
1.引言
關於機器人的研究課題已越來越多地受到關注,但由於大量的動態耦合(hé),如不同關節之間、未知幹擾以及(jí)時(shí)變(biàn)參數等,越(yuè)來越需要具有魯棒性f、自適應性(xìng)、快速(sù)收斂和結構簡單的控製策略。
目前(qián)研究人員已開發設(shè)計了一些不確定(dìng)係統控製器,例如自適應控製¨1、滑模控製舊J、被動控製(zhì)舊1及李亞普諾夫穩定性控製H1等,這些控製器需要補償這些結構不確(què)定參數和有界幹擾。其控製策略易局限於設定點控製或未(wèi)知有界常數控製,因此,不確定係(xì)統的控製器設計仍然是一個很大的挑戰(zhàn)。本文針對機器人軌(guǐ)跡追蹤,提出了一種運用視覺信息作為反饋信號的目標空間(jiān)自適應雅格比(Jacobian)控製策(cè)略。這種白適應魯棒控製策略(luè)設計不是依(yī)賴於未知有界參數的先驗知識,而依賴於在線估計未知矢量,在每一時(shí)刻,控製輸入可以補償存(cún)在的未知參數。使用這種反轉動態和滑模(mó)控製理論可加強(qiáng)閉環穩定性,改善動態性能,如末端(duān)裝置運(yùn)動的追(zhuī)蹤誤差或快速收斂性。仿真結果表明了該控製策略的有效性(xìng)。
2.問(wèn)題描述
機器臂期望(wàng)的末端裝置的位置定義在任務空間,取X∈Rn為任務空間矢(shǐ)量,依據參考文獻[5]可描述為(wéi)

考慮如外部幹擾和(hé)參(cān)數變動等係統不確定項,係統動力學模型方程(4)可描述為
具有乃個廣義坐標的n輸入n輸出二階非線性仿射係統的動力學模型可描述為
考(kǎo)慮不(bú)確定性,n自(zì)由度機械係統形式為
則所有包(bāo)含非建模動態(tài)和其它未知外部幹擾的不確定(dìng)項可統一描述為
將式(8)代入式(7)得
比較式(shì)(5)和式(9),則
3.自適應魯棒控(kòng)製器設計(jì)
追蹤控製問題可通過保持係統(tǒng)軌跡在滑模(mó)麵S=O[71上得到解決,滑模麵可取(qǔ)為
其中,S(t)為n×l維矢量;A為(wéi)n×n維對角正
由式(10)知

考慮非線性不(bú)確定動態係統,如式(7)所(suǒ)示,若魯棒(bàng)控製率(lǜ)取為

其(qí)中,K為需要設計的對角正定常數矩陣;F定義為預測幹擾;則具有模型(xíng)及(jí)幹擾(rǎo)不確定性的機器臂係統可獲得漸進魯棒穩定性。
取Lyapunov函數

則Lyapunov函數微分可表示為
設計自適應率為

則(zé)式(15)可(kě)轉換為
若滿足設計的控製率和自適應(yīng)更新率(lǜ);則(zé)y關(guān)於.s負定;即任意非零初(chū)始值的軌跡(jì)誤差將漸進收斂於滑模麵(miàn)S=0,從而保證機(jī)器臂係統魯棒穩定性。
4.仿真實(shí)例
以圖1所示2自由度機器臂(bì)係統(tǒng)方程為例仿(fǎng)真。
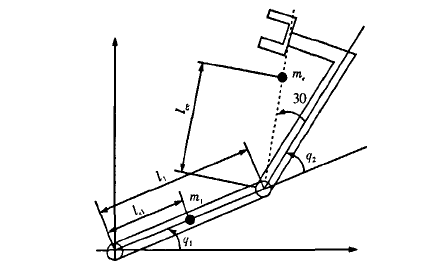
圖1 2自由度串聯機器臂機構圖
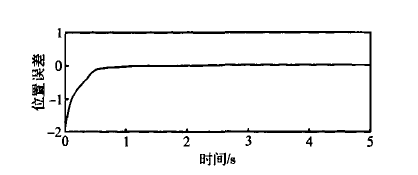
圖2關節1的位(wèi)置追蹤誤差
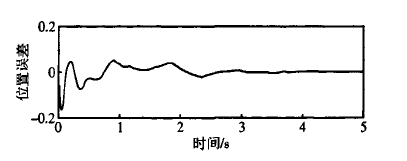
圖3關節2的位置追蹤誤差(chà)
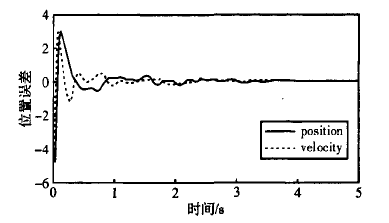
圖4機器臂末端裝(zhuāng)置的追蹤誤差
仿真結果表明,盡管(guǎn)所有(yǒu)的不確定性包括機器臂動(dòng)力學及外部幹擾,但機(jī)器臂追蹤誤差能(néng)較快(kuài)收斂到零。證明了本文提出的自適應控製策略追蹤誤差較小及誤差較快收斂到(dào)零,具有較好的有效性。
5.結論
本文提出的控製方案綜合了Jacobian自適應控製、滑模(mó)控製和反轉動態控製(zhì),基於Lyapunov穩定性(xìng)分析表明機器臂係統漸進(jìn)穩定。仿真結果也證實了盡管機器臂係統引(yǐn)進了包括變化(huà)的動態參數和未知幹擾等不確定項,但本文(wén)提出(chū)的控(kòng)製器具有較好的魯棒追蹤性能,使提出的控製策略動態地修正控製子空間及目標,使其(qí)收斂到實際值。
投稿箱:
如果您(nín)有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡(huān)迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您(nín)有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡(huān)迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更(gèng)多相關信息

業界視點
| 更多
牌調查")
行業(yè)數(shù)據
| 更(gèng)多
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分地區金屬切削機床產量數據
- 2024年(nián)11月 軸承出口情況
- 2024年11月 基(jī)本(běn)型乘用(yòng)車(轎車)產量數據
- 2024年11月 新(xīn)能源汽車產量數(shù)據
- 2024年11月 新能源汽車銷量情況(kuàng)
- 2024年10月 新能源汽車產量數據
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切削機床產量數據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源(yuán)汽車銷量情況
- 2024年8月 新能(néng)源汽(qì)車產量數據
- 2028年8月 基本型乘用車(轎車)產量(liàng)數據
博文(wén)選萃
| 更多