



質量(liàng)平衡原理(lǐ)在機器人機械臂設計中的應(yīng)用
2016-8-29 來源:東南大學機械工程係 作(zuò)者: 倪受東 文巨峰 顏景平
摘要:機器人的機(jī)械臂設計(jì)對機器人的操作性(xìng)能具有決定性的影響,本文運(yùn)用質量平衡原理。利用關節驅動電機自身的質量對自行研製的YJP一1型雙臂冗棠度機器^的操作臂(bì)進(jìn)行了(le)優化設計,實驗結果表明.該設計方法對減(jiǎn)小機械臂動力係統的耦音慣量影(yǐng)響.減輕(qīng)驅動電機負載具有良好(hǎo)的效(xiào)果(guǒ)。
關鍵詞:機(jī)器臂;質量平衡;耦台慣量
0、引言
機器人的組成一般(bān)可分成3大部分,即:機械係統、控製係統和驅動係統(tǒng)。機(jī)械係統按控製係統的指令進行運動,動(dòng)力由驅動係統提供。機械係統又叫操作機(Manipulator),是機器人的執行(háng)機構,一般可(kě)分為基座、機械臂、末端執行器。機械(xiè)臂都是由連杆首尾相接,通過關(guān)節相聯,構成一個開式鏈,機(jī)器人的控製係(xì)統和驅動係統在(zài)機器(qì)人(rén)的設計中固然極其(qí)重要,但作為其機械係統主要部分的機(jī)械臂的設計對機(jī)器人的控製性能同樣具有重要的意義,對(duì)機器人的操作性能具有決定性的影響。
機器人的機械係統是一個強耦合非線性動力係統(tǒng),其耦合性是由於機械係統首尾相接的鏈(liàn)式結構及驅動器串聯的配置特點決定的,因而(ér)是機(jī)器(qì)人設計中特有的問題,但由於(yú)耦合和非線性的影響(xiǎng),使機器人的動力性能變壞(huài),動力學分(fèn)析(xī)更為複雜,不(bú)利於機器人的動力學實時控製.如能部分抵消(xiāo)非纘l生和耦合的影響,不失為一種好的設計方法。本文所述(shù)即為利用關節驅動電機自身的質量進行平衡設計,部分抵(dǐ)消機器人(rén)動力係統耦合項的影響,減小驅動(dòng)電機的負載,在作者們自(zì)行研製的YjP一1型雙臂冗餘度機器人機械臂的設計中(zhōng)取得良好效果。
1、基本原理
對於兩連杆機械臂模型,如圖l所(suǒ)示,0-、e。分別為連杆1、2的轉角,M,、肌(jī)是關節的驅動轉矩,m:為2杆質量,m0為末端負載,厶(sī)為2杆長度,c為2杆質(zhì)心,k。為(wéi)2杆(gǎn)質心到其支點的距離(lí)。其動(dòng)力學方(fāng)程為(wéi):
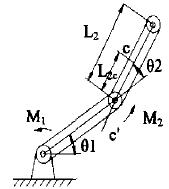
圖1
如前所述機器(qì)人動力係統是一種(zhǒng)非線性強耦合係統。上式中省略了向心(xīn)項和哥氏項,因為在非高速運動情況下,向心項和哥氏項的影響較小,可以簡化計算。式中^∽,.A z:8:是自慣量項,它表示角加速度s1,e2引起(qǐ)的作用在自(zì)身關節上的(de)慣性力矩,At,A:是重力(lì)項(xiàng)的影響.它與臂杆的質量,質心離轉動中心的距離以及位置角有關,A:t釓A。z6z為耦合慣量項,它表示(shì)由臂杆l或2的轉動造成(chéng)的對2或1關節的慣性(xìng)力矩。耦合項的影響,使係統(tǒng)的動力性能變壞(huài),使動力學分析(xī)更(gèng)為複雜(zá),因此,應盡量減小耦合項的影響,對於耦(ǒu)台項係數:A,:=A:-,其中其他(tā)一些項是由連(lián)杆自身質量和轉動慣量引起的,從機械設計的角(jiǎo)度看,要減小它(tā)們的影響,隻有(yǒu)減小連杆自身質量(liàng)和(hé)轉動慣量及負載質量,但其質量和轉動慣量不能沒有(yǒu)。在耦台項係數裏有一(yī)項為(m:L:,+moL:),因此,在減小質(zhì)量的同時,如設法改變2杆質心的(de)位置,使L2。=一(mo/m:)1.2,即(m:L2。+mo厶)為0,即可部分抵消非線性和耦合項的影響,從圖1中可看出,厶。為負值,即2杆質心落到支點的另(lìng)一(yī)側,即c’的位(wèi)置。
2、質量平衡原理在YdP一(yī)1型機器人中的應用
在YJP一1型雙臂冗(rǒng)餘度機器人的設計中,作(zuò)者根據(jù)上述原理,利用關節驅動電機自身的質量進(jìn)行平衡(héng),對機械臂進行了優化設計。
YJP一1型雙臂冗餘度機器(qì)人單機械臂的機構原理簡圖如圖2。
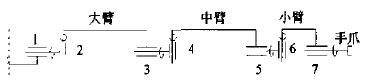
圖2
對於1、3、5、7四個繞水平軸轉動的(de)自由度,由於(yú)負載(zǎi)在其轉動軸線上,負載轉矩較小,無需進行(háng)質量平衡(héng),對於2、4、6三個繞垂直軸轉(zhuǎn)動的自由度,承(chéng)受負載轉矩較(jiào)大,用電機質量進行平衡設計。機器人末端負載(zǎi)設計參數為‰=0.5kg。
機械臂設(shè)計參數如表1。
表1
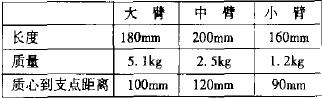
根據質量平衡原理,代入機械臂具體設計(jì)參數以及2、4、6三個(gè)關節驅動電機(jī)的重量,可計算出2、4、6三個自由度的驅動電機應分(fèn)別安裝在(zài)支點相對一側的51mill、55mm、64mm處。這裏需特別說明的是,在第一次設計時,各驅動電機都安裝在(zài)轉動軸負載(zǎi)的一側(cè),這樣設計使電機(jī)負載轉矩增大,也不利於減小耦合項的影響。采用質量平(píng)衡原理進行(háng)改進設計後(hòu),將(jiāng)2、4、6三個關節的驅動電機安(ān)裝在支點另(lìng)一(yī)側伸出的燕尾槽內,通過齒輪減速(sù)帶動機(jī)械臂轉動,實驗結果(guǒ)表明(míng),改進後(hòu)的設計明顯減輕了驅動電機的負載,也減小了耦合慣量的影(yǐng)響。
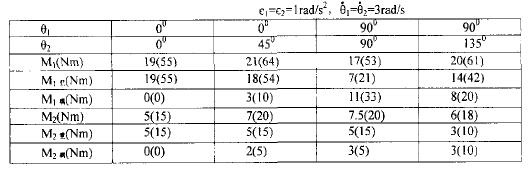
實驗是在其它自由度不動(dòng),隻轉動4、6兩個自由度的情況下進行的。小臂和中臂的初速度都為0,以最大加(jiā)速度到達最大的允許速度,然後(hòu)作勻速轉動。為便於比較,將臂杆在特殊位置(zhì)上以特定參數運動時測出的所需驅動轉矩列於表2中。e。、e:為4、6關節的角加速度,0-、0:為勻速轉動時的最大角速度。表中的吖(吖),、M:分(fèn)別表示(shì)4、6關節所需總的驅動轉矩,M,t、Mz 1分別(bié)表(biǎo)示重力項的大小,M_、慨_表示(shì)耦合項的大小,表中括弧內數據為沒有進行質量(liàng)平衡前的測量值。
由表中黼可見,由於采用了質量(liàng)平衡技術,關節(jiē)轉矩中(zhōng),重(chóng)力項和鵑合項的影響都大為(wéi)減小,約為質量平衡前的1/3,關節所需總的驅動蔣矩也相&蕊孫。由此可見,質量平衡的合理利(lì)胃,可以有搿洲口削負載轉矩和耦台項的影響,對改善(shàn)操作機的性(xìng)能具有重要意義。
表2
3、結束語
本文(wén)合理地運用了質量平衡原理,對YJP一1型雙臂冗餘度機器人的機械臂進行(háng)了優化設計,利用關節驅動電(diàn)機自身的重量進行平衡,避(bì)免了附加平衡質量塊使整個(gè)機械臂係統質(zhì)量增大的不利影響。實(shí)驗結果表(biǎo)明:這(zhè)種改進設計,一方麵減小了關(guān)節(jiē)驅(qū)動電機的負載(zǎi),另一方麵也大大減輕了機器臂係統耦合慣量項的(de)影響,使機械臂的動力性能和操作性能大為改善,是(shì)質量平衡原理(lǐ)的成功應用。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本網編(biān)輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本網編(biān)輯部, 郵箱:skjcsc@vip.sina.com
更多相(xiàng)關信息

業界視點
| 更多
查")
行業數(shù)據
| 更多
- 2024年(nián)11月 金屬切削機床產量數據
- 2024年(nián)11月 分(fèn)地區金屬切削機床產量(liàng)數據
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新(xīn)能源汽車產量數據
- 2024年11月 新能(néng)源汽車銷量(liàng)情況
- 2024年10月 新能(néng)源汽(qì)車產量數據
- 2024年10月 軸承出(chū)口情況
- 2024年10月 分地區(qū)金屬切削機床產量數據
- 2024年10月 金屬切削(xuē)機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月(yuè) 新(xīn)能源(yuán)汽車產量數據(jù)
- 2028年8月(yuè) 基本型乘用車(轎車)產量數據
博文選萃
| 更多