")



機(jī)器臂運動路徑設計(jì)問題之算法分析
2016-8-31 來源:長安大學工程機械學院 作者: 張旭 任(rèn)國濤 寧(níng)鵬
摘要:機械(xiè)臂運動(dòng)路徑設計(jì)問題備受機器人領域的關注,本文對該(gāi)問題進行了分析,把具(jù)體(tǐ)地現實問題用數學語言進行(háng)描述,將問(wèn)題抽象化後設計了(le)一個(gè)通用的(de)數學算法(fǎ)去解決。
關(guān)鍵詞:機器臂(bì)指令序列算法
1、問題概述(shù)
根據市場需求,機械臂製造廠打算為產品研發一個軟件係統,能夠直接將(jiāng)用戶(hù)的運動命(mìng)令自動轉換成機器指令序列。即設計一個(gè)通(tōng)用的算法,用來計算執行下麵指定動(dòng)作所要求的指令(lìng)序列:
(1)已知初始姿態Φ0和(hé)一個可達 目標點的空間位置(Ox,Oy,),計算指尖到達目標點的指令序列。
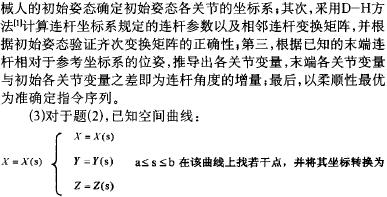
(2)要求指尖沿著預先指定的一條空間(jiān)曲線X=X(S),y=y(s),Z=z(s),a≤s≤b移動,計算(suàn)滿足要求的指令序(xù)列。
(3)在第(1)個問題中,假(jiǎ)設在初始位(wèi)置與目標位(wèi)置之(zhī)間的區域中有若幹個已知大小、形狀、方向和位置的障礙物,要求機械(xiè)臂在運動中(zhōng)始終不能與障礙(ài)物相碰,否則會損壞機器。這個問題稱機械臂避碰(pèng)問題,要求機械臂末端在誤差範圍內到達目標點並且整個機械臂不碰到障礙物(機械臂連杆的粗細自己設定)。
2、解題(tí)分析
(1)首先,題中初始位置(zhì)(0,-90,0,0,-90,0)的角度存在正負,故對角度的正負(fù)做出如下規定(dìng):關節轉角順時針旋轉為負,反之為正。並(bìng)假設機械臂各個關節的運動是(shì)勻速的,不考慮加速度對連(lián)杆運動(dòng)軌跡的影響。
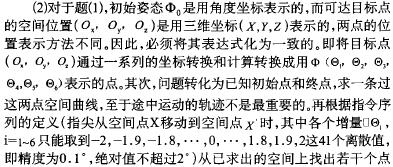
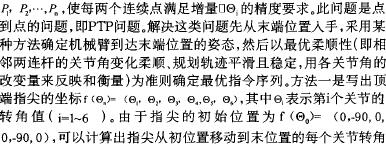
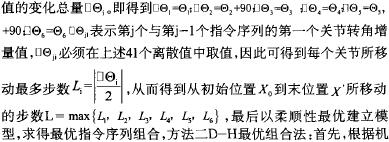
Φ(@1,,@2 ,@3 ,@4 ,@ 5,06 )形式,使所有(yǒu)離散點滿足每相鄰兩點之間的I口@_l滿(mǎn)足精度要求,這類問題稱為(wéi)cP問題。直接讓指尖沿著曲線移動比較困難,可將曲線離散化,將CP問題轉化(huà)為PTP問題,仍舊把初始姿(zī)態定義為(wéi) 0,各離散點為末端位置,采用PTP問題方法求得各離散點(diǎn)的姿態。為了避免組合帶來的誤差,保證機械臂指(zhǐ)尖軌跡的精(jīng)度,必須(xū)保證任意相鄰離散(sàn)點的指(zhǐ)令序列不超過2,若不滿足,則在此離散點間進行插值,重複以上動作(zuò),直至所有的都滿足指令係列小(xiǎo)於等於2。
(4)對(duì)於問題(3),已知初始位置和末位置,求一條空(kōng)間曲線要(yào)求不經過若幹個已知點,即避開障礙物的運動,稱這類為HP問題(tí)。即在(zài)PTP問題中(zhōng)增加障礙物,使得指尖必須避開障礙物運動的路徑規劃問題。考(kǎo)慮先讓指尖(jiān)沿著起點和終點的連線軌跡運動(dòng),當它遇到障礙物時,設法讓其(qí)避讓然後從新的起點再徑直向目標點前進,不斷(duàn)重複上述(shù)過(guò)程,直至達到目標點。可以看出,從每(měi)個新的起點徑直向目標(biāo)點前進,這樣走距離最短(duǎn),當然這(zhè)指從每個新(xīn)起點到(dào)終點(diǎn)間的距離(lí)最短。實(shí)際過程中,障礙物的形狀可能會各種各樣,過於複雜會提高算(suàn)法的複雜性,采用最小包容長方(fāng)體對障礙物進行簡化。具體算法及(jí)實(shí)現過程許多論文(wén)中均有提到,這裏不再累贅。
3、結語
在機器臂的運動(dòng)問題中,機器人要執(zhí)行的(de)動作都可以抽象為點到點的運動的(de)PTP問題(tí),已知曲線找(zhǎo)點的CP問(wèn)題及點到點的避障問題fl~HP問題。在解實際問題時(shí)首(shǒu)先(xiān)對問題加以定性,然後用對應的算法進行(háng)解決。
投稿箱:
如果您有機床行業(yè)、企業相關新聞稿件發表,或進行資訊合(hé)作,歡迎聯(lián)係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業(yè)、企業相關新聞稿件發表,或進行資訊合(hé)作,歡迎聯(lián)係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相(xiàng)關信息

業界視點
| 更多

行業數據
| 更多
- 2024年11月 金(jīn)屬切削機床產量數(shù)據(jù)
- 2024年11月(yuè) 分地區金屬切削(xuē)機床(chuáng)產量數據(jù)
- 2024年11月 軸承出口情況(kuàng)
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新能源汽車產量(liàng)數據
- 2024年(nián)11月 新能源汽車銷量情況
- 2024年10月 新能源汽(qì)車產量數據(jù)
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切削機床產(chǎn)量數(shù)據
- 2024年10月 金屬(shǔ)切削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽(qì)車產(chǎn)量數據
- 2028年8月 基本(běn)型乘用車(轎車)產量數據
博文選(xuǎn)萃
| 更多