


摘要:數控機床與傳統(tǒng)機床相比(bǐ)具有精(jīng)度高(gāo),效率高的特點(diǎn)。但目前(qián)國內小型企業仍以普通(tōng)機床(chuáng)為主,製約了小型企業(yè)的發(fā)展。未解決上述問題利用現(xiàn)代先進數控技術(shù)對舊的設備進行改造和提升,以最少的(de)投入(rù)來滿足現代化加工的需求,成為近幾年機床改造的發展方向。本文以C616普通車床的數控化改造(zào)為例,介紹(shào)以西門子802S為數控係統的電氣化(huà)改造方案。
關鍵詞:西門子802S數控係統;控製電路
1、 802S數(shù)控係(xì)統的基本功能與方案配置
德國(guó)西門子公司(sī)生產的802S數控係統是一種專門針對中國市場(chǎng)開發的經濟型機床數控係統。它采用32位的微處理器(qì)(AM486DE2)、集成PLC,分離(lí)式小尺寸操作麵(miàn)板、液晶顯(xiǎn)示器和機(jī)床(chuáng)控製麵板。802S可以(yǐ)控製2~3個步進(jìn)電機驅動的進給軸和一個主軸。802S數控係統的(de)基本功能如下:線性插補軸最多3軸(開環);一個變頻器驅動的主軸,具有主軸編(biān)碼器反饋接口;PLC模塊具有16個輸入點和16個輸出點,經擴展可以(yǐ)達到64個輸入點和64個輸出點;支持中(zhōng)/英文轉換;螺距補償和間隙補償;具(jù)有RS232C串行接口,可以與計(jì)算機通信;具有故障報(bào)警信(xìn)息顯示和診斷數據(jù)顯示;支持車(chē)削循環和銑削循環;刀具補償功(gōng)能;螺旋插補(bǔ)功能;用(yòng)戶程序存儲器256K;可以擴展兩個電子手輪;通過特(tè)定的參數設置可(kě)以獲得示教功能。
本文C616改造方案中的配置為:選(xuǎn)用(yòng)802S NC係統(tǒng),含顯示和操作(zuò)麵板(bǎn);根據X軸的(de)進給功率要求,通過計算(suàn),選擇9Nm的步進電機;根據z軸的進(jìn)給功率要求,通過計算,選擇12Nm的步進電機;X軸和Z軸驅動(dòng)器,選用SETPDVEC型驅動器;主軸變頻器采用ATV-28HU90N4變頻器;主軸編碼器采用1024線變頻器;采用lOOVA的係統電源隔離變壓器;係統電源采(cǎi)用24V/4.5A電源;主(zhǔ)電機仍采用原來舊機床的電機。
2、 控製電(diàn)路設計
2.1主軸(zhóu)電路
(1)802S數控係統的主軸速(sù)度模擬(nǐ)量控(kòng)製電壓西門子802S數控係統的(de)主軸速度模擬量控(kòng)製電壓為:DC-10V~+10V。其中0~+10V為主軸正轉速度控製(執行(háng)M3指令(lìng)),0~-10V為主軸反轉速度控製(執行M4指令)。而變頻器的速度控製電壓為0~+10V,其正/ 反轉由(yóu)變頻器的I/O端(duān)口輸入的狀態控製。如果直接把數控係統的速度控製模擬電壓輸出端直接與變頻器連接,將導致變(biàn)頻器不能識別反轉控製電壓而不能實現反(fǎn)轉(zhuǎn)。電路KAl、KA2用於控製變頻器的(de)正反轉(zhuǎn),KA3用(yòng)於對速度控製電壓(yā)的極性進行轉換,保證變頻器的速度控製電壓在反轉時也為0-+10V。
(2)變(biàn)頻器故障報警輸出
變頻器的故障報警輸出作(zuò)為係統的報警輸入,如果主軸出現過流、短路、過熱(rè)等故障時均可及時停止係統的運行,並發(fā)出報警信號。
2.2軸限位與參考點返回電路
(1)軸的限位(wèi)輸入端設置為負邏輯
采用負邏輯控製:使用限(xiàn)位行程開關的常閉(bì)觸點,當限位開關沒有壓下(xià)時I/O點與24V接通(tōng),當限位開關被(bèi)壓下(xià)I/O點與24V斷開,機床限位。這種(zhǒng)接法消除因線路開路而產生限(xiàn)位失靈現象,提高了限位電(diàn)路的可靠性(xìng)。限(xiàn)位輸(shū)入端采用負邏輯需對係統的相關參數(shù)進行修改。采用負邏輯輸入(rù)的方法,這樣有利於提高數控(kòng)機床的可靠性和安全性。本(běn)次數控改造使用的數控係統為西門子802S數控係(xì)統,實現負邏輯輸入(rù)要軟件、硬件兩方麵配合才能實現。
a.硬件連接

圖2.1負邏輯輸入(rù)
圖2.1所示的是負邏輯輸入的連(lián)接方法,信號輸入使用行程開關(guān)的(de)常(cháng)閉觸點。在正常(cháng)情況下SQl是閉合的,該(gāi)輸入點的邏輯值為“1”,當SQl被壓下斷開時輸(shū)入點邏輯值為“0”。這時要求通過數控係(xì)統的參數設置(zhì)或修改PLC程序把該點邏輯值“1”設定為無效狀態,而邏輯值“0”設定為有效(xiào)狀態。如果從+24V端子(zǐ)到PLC的輸入(rù)點之問的線路(lù)出現開路(lù)或接觸不良時,該點被認為有效,機(jī)床會立(lì)即報警,必(bì)須在電路連接(jiē)良好的情況下機床才能正常運行。這種方法排除了因限位電路開路而造成故(gù)障的可能性,機(jī)床的(de)安全性得到提高。
b.軟件(jiàn)設(shè)置
負(fù)邏輯需要把邏輯“1”改為無效狀態而邏(luó)輯“0”為有效狀態,是通過在西門子SINUMERIK802S數控係統中改變參數實(shí)現(xiàn)的。
(2)參考點返回采用雙開關方式
用行程開關做參考點返回減速開關,用接近開關(guān)作為參考點(diǎn)檢測開關。在各軸返回參考點時,先高速運動到參考點返回(huí)減速開關,將其壓下後反向慢速逼近參考點,到參考點檢測開關後完成參考點返回。由於(yú)這種方法使各軸在達到參考點前速度較低(可通過參數(shù)設定改變),所以精度較高並且可以消除(chú)絲杠的反向間隙。
2.3 電動刀架控製電路
電動刀架的刀位檢測霍爾元件為輸出(chū)電(diàn)路為集電極開路輸出方式,不能與(yǔ)數控係(xì)統直接相連,需要在各刀位檢測電路輸出端添加集電(diàn)極上拉電阻。如圖2.2所示。
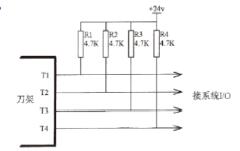
圖2.2刀架電路
2.4驅動器與步進電(diàn)機的(de)連接線路(lù)
驅動器與步進電機的連接電纜采用數控係(xì)統配置的專用動力電(diàn)纜。為保證步進電機的相序準確,必須按照係統說明書的要求(qiú)連接,否則步進電機不能正(zhèng)常(cháng)運轉。
2.5係統接地電路
接地包括係統電源接地和步進電機驅動係(xì)統接地(dì)。分別如圖2.3、2.4所示(shì)。
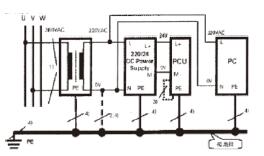
圖2.3 係統電源接地
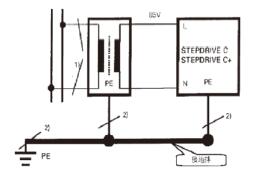
圖2.4 步進電(diàn)機驅動係統接地
良好合理的接地(dì)是係統可靠工作的重(chóng)要(yào)保證。為(wéi)提高係統抗幹擾能力各須接地(dì)的設備均通過10mm2的接地線直接與接地排相連,地線排再通過16mm2的接地線與電源係統(tǒng)的(de)地線相連接。這種接地方(fāng)法可以(yǐ)抑製各設備間的(de)共態(tài)幹擾。
2.6機床參數設置及控製元件
機床參數的設置應根據設計(jì)電路情況、802S係統的操作說明書以及C616機(jī)床的基本參數(shù)進行設置。針對C616普通(tōng)車床(chuáng)的改造共用到如下元件:802S數控係統(tǒng)含有主機操作麵(miàn)板驅動單元、步進電機(X軸9Nm,Z軸12Nm);航(háng)空插件(jiàn);繼電(diàn)器;空氣開關;接(jiē)觸器;起停按鈕;急(jí)停開關;小按鈕;三相吸收器;變(biàn)壓器(用於步進(jìn)驅動器電源和照明);導線;電纜;風扇(用於強電櫃散熱/操作櫃散熱);熱(rè)縮管;線號管;電源(yuán)指示燈;蜂鳴器;線槽和卡軌。
結(jié)論(lùn)
本文對C616普通(tōng)車床進行基於西門子802S數控係統的數控化改造,設計了其中(zhōng)主軸電路(lù)、刀架控製電路等部(bù)分。對完成改造後的機(jī)床進行安裝、調試,其性能滿(mǎn)足(zú)用(yòng)戶使用要求。
如果您有機床行業、企業相關新聞稿(gǎo)件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com

牌調查")
- 2024年11月 金屬切(qiē)削機床產量數據
- 2024年11月 分地(dì)區(qū)金屬切削機床產量數據
- 2024年11月 軸承出口情況
- 2024年11月(yuè) 基本(běn)型乘用車(轎車)產量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產量數據
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切削機(jī)床產量數據
- 2024年10月 金(jīn)屬切削(xuē)機床產量(liàng)數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽(qì)車產量數據
- 2028年8月 基本型乘(chéng)用車(轎車)產量數據