
1 引 言
在生產和生(shēng)活中, 旋(xuán)轉的機械(xiè)在運轉時有時會產生振動, 這樣的振動是無益的。長時間的振動會造成能量轉換過程中巨大的浪費, 嚴重的時(shí)候甚至產生(shēng)斷裂, 引發事故。為避免類(lèi)似的現象發(fā)生, 對旋轉體做動平衡(héng)是非常有效的手段。對於剛性轉子, 其工作轉速n 一般低於轉子一階自振頻(pín)率(lǜ)nc ,即n < ( 0. 6 ~ 0. 75) nc , 這類(lèi)轉(zhuǎn)子不考慮其轉軸的彈性變形, 對於高度為h , 直徑為d 的剛性轉子, 當h/ d < = 0. 2 轉子的質量可(kě)以看(kàn)作分布在同一平(píng)麵內。[ 1] 其旋轉不平衡的原因是(shì)轉子的重心不與軸線重合。類似於刹車盤這種圓盤狀的剛性轉子都可以在本平衡機上進行校正。
2 平衡(héng)機係統結構(gòu)設計
2.1 1 測試係統結構設計
本平衡機測試係統采用基於影響係(xì)數法[ 2] 的動平衡檢測(cè)原理(lǐ), 主要包括數據采集模塊、單片(piàn)機係統、偏心(xīn)振動壓電傳感器模塊和相位測量光(guāng)電傳感器模塊等組成, 如(rú)圖1 所示(shì)。
數據采集卡包括以下功能電路:
1) 基準(zhǔn)信號發生(shēng)器, 通過對光電傳感器采(cǎi)集的信號進行整型, 變為(wéi)方波信號分兩(liǎng)路(lù), 一路(lù)經過鎖相環(huán)倍頻, 生成開關電容濾波器的控製信號; 另一路送單片機係統進行不(bú)平衡角度的測量。
2) 開關電容濾波電路[ 3] , 通過開關(guān)電容濾波器的傳感器(qì)信號被濾除了與轉速不(bú)同頻率的其他噪聲。
3) 程(chéng)控放大電路, 因(yīn)為(wéi)檢測到的不(bú)平(píng)衡電(diàn)壓信號是變化的, 當電壓信號變化時, 有必要選(xuǎn)擇合適的(de)電壓(yā)放(fàng)大倍數。通過程序選擇電壓(yā)放大電路中電阻的大小實現(xiàn)程控放大(dà)。
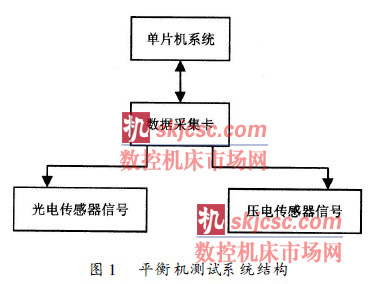
轉子在旋轉過程中產生的離心(xīn)力壓(yā)迫主軸振動。位於主(zhǔ)軸上的壓(yā)電傳感器(qì)檢測到這個壓力並轉化為電壓信號輸出到數據采集模塊中; 另一路安裝在轉子主軸邊的(de)光電傳感器(qì)產生與主軸旋轉(zhuǎn)同頻率的參考信號, 兩(liǎng)路信號進入數據采集卡, 數(shù)據采集卡負(fù)責將傳感器采(cǎi)集的信號進行放大, 整形,濾波。經處理後的信號進入C51 係(xì)列單片機係統的下位機(jī)進行不平(píng)衡量與不平(píng)衡相位的計算與處理, 得到相(xiàng)位與幅值信(xìn)號, 經RS- 232 串口傳至(zhì)上位機顯示(shì)和進(jìn)行相關計算, 由上位機程序判斷銑削弧度, 計(jì)算銑削深度和銑削位置。隨後上位機將角度信號和深度(dù)信號發送至PLC 並使各執(zhí)行部分進行(háng)銑削去重的(de)步驟。本機選用歐姆龍(lóng)PLC 作為控製器, 負責對各(gè)執行部件進行電氣(qì)控製。
2.1 2 PLC控製電(diàn)路設計
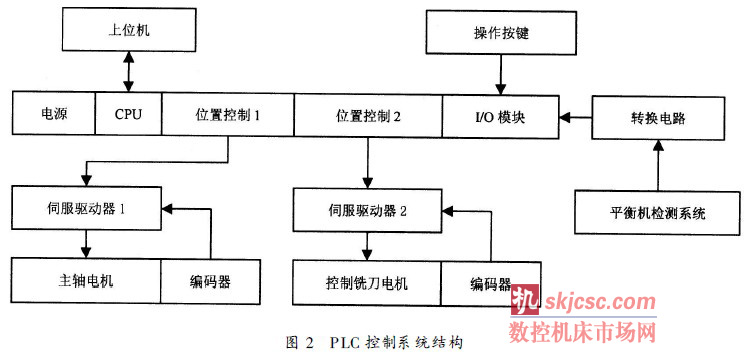
可編(biān)程序控製器( PLC) 是以微機技術為核心的通用工業控製裝置(zhì)[ 4] , 它是將傳統的(de)繼電器- 接觸器控製技術(shù)與計算機(jī)技術(shù)和通信技術融(róng)於一體,具(jù)有功能強大(dà)、環境適應性(xìng)好、編程簡單、使用方便等優點。本機選用歐姆龍公司的PLC, 伺服係統選用三(sān)菱公司Minas A4 係列交流伺服係統。並(bìng)采用位(wèi)置控製方式對電機進行精確控製。圖2 為PLC 控製係統(tǒng)結構圖。
3 銑削去重(chóng)數學模型
不平衡(héng)量通常在工程中采(cǎi)用重(chóng)徑積來表示,如: 100 的物理意義為: 在100 的半徑處其殘餘的不平(píng)衡量(liàng)為1。平(píng)衡去(qù)重就(jiù)是要在檢測(cè)出對應的相位去掉固定大小的不平衡(héng)量( 單位為) 。平衡機去重方法有(yǒu)很多, 工(gōng)程中常用的包(bāo)括鑽削(xuē)去重法(fǎ), V 型銑(xǐ)削去重法, 外圍圓弧(hú)銑(xǐ)削去重法等。針對刹車(chē)盤這種盤狀工件, 去重係統采用外圍圓弧銑削方法進(jìn)行(háng)操作。此方法的(de)優點是一次去重量大, 加工速度快, 效率高(gāo), 便於程序控製。
去重量與去重深(shēn)度和去(qù)重弧(hú)度有關, 按照實際工藝要求, 采用定(dìng)長變深的去重策略[ 5] , 即固定刹(shā)車盤外圍銑削弧度為或。根據測量的不平衡量大小由程序(xù)判斷銑削弧度, 調整(zhěng)銑削深度不至於過深。根據上(shàng)述特點如圖3 建立幾何去重模型: M= 不平衡(héng)量(liàng)h = 去重深度D = 工件半(bàn)徑(jìng)Q= 工(gōng)件密度B= 外(wài)圍(wéi)銑削(xuē)弧度, 圖4 為圖3 的側麵結構圖。
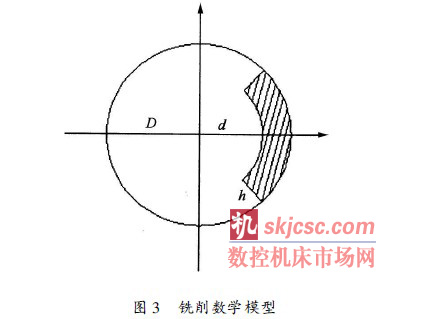
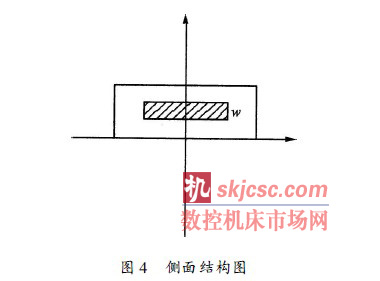
圖中(zhōng)陰影部分為通過外圍圓弧銑削掉的部(bù)分,根據對稱性, 被銑削掉的部分的重心處於圖3 中的橫軸上。由於在自動去重中, 工(gōng)件半徑D, 銑(xǐ)刀刀寬w 都是已知量, 因(yīn)此, 需要找出此不平衡量與銑削深度h, 外圍(wéi)銑(xǐ)削弧度B之間的函數關係。

4 上位機軟件設計(jì)
組態王開發監控係統(tǒng)軟件是新型的(de)工(gōng)業自動控製係統正以標準的工業計(jì)算機軟、硬(yìng)件平台構成的集成係統取代傳統(tǒng)的封閉式係統(tǒng), 它具有適應性強、開放性好、易(yì)於擴展、經濟、開(kāi)發(fā)周期短等優點。
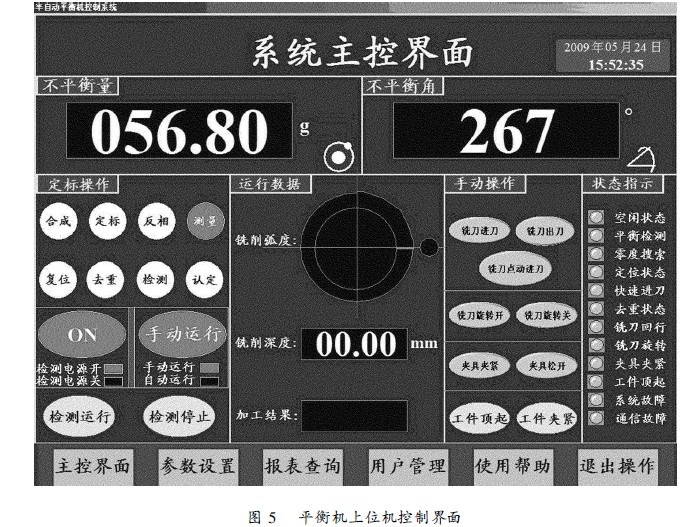
應用亞控公司的組態王軟(ruǎn)件開發(fā)的控(kòng)製界麵,顯示測量出的工件不平(píng)衡量與不平衡角度的實時值, 並且能夠實時顯示銑削運行的(de)狀態。係統支持手動與自動兩種方式, 當係統處於手動狀態時, 銑刀的伸縮, 銑刀旋轉, 主軸(zhóu)與夾具的(de)氣動控製都可以(yǐ)進行(háng)手動操作。當係統處於自動狀態時, 隻需要操作人員將工件放置(zhì)到工位上, 點擊/ 工件夾緊0後, 係統將自動對工件進行測試和銑削去重, 去重完成(chéng)後汽缸自動頂起工件並保存數據。控(kòng)製係統軟(ruǎn)件還包括參數設置, 報表查詢, 用戶密碼管理等界麵(miàn)。本係統(tǒng)控製主界麵如圖5。
動平衡(héng)測試與工件去重都在機床上完成, 控製台負責進行測試操作、參數設置以及實時監控去重流程。控製(zhì)軟件界麵友(yǒu)好(hǎo), 方便操作, 並具有(yǒu)實時數據存儲, 報表記錄、查詢、打印等功能。動態數據交換( Dy namic Data Ex chang e , DDE) 是Window s提供的一套基於(yú)消息(xī)的數據(jù)交換協議。在(zài)實際工程中經(jīng)常需要對批量加工的數據進行保存, 組態王的報(bào)表功能能滿足這種需要(yào)。其中報表的管理(lǐ)需要組態王(wáng)和Ex cel 進行數據交換, 基於DDE 的處理[ 6] , 組態能夠將每次加(jiā)工前後(hòu)的不平衡量, 不平衡角度以及加(jiā)工日期時間等數據以數據庫的形式保存起來, 方便以後的查詢(xún)、管理。
4 結 論
采用組(zǔ)態王編寫的上(shàng)位機控製係統能(néng)直(zhí)觀的顯示不平衡量值以及不平衡角度的具體(tǐ)位置, 且能方便的監控銑削狀態。基於PLC 控製的交流伺服電機的精確(què)控製使平衡機自動(dòng)去重達到高精度的要求, 減少了係統中的校正誤差。大量實踐證明該平衡機一次去重率能達到90%以(yǐ)上。而且對於類似的需要通過銑(xǐ)削進行平衡的(de)盤狀轉子具有廣泛的通用性。
如果您(nín)有機床(chuáng)行業、企業相關新聞稿件發表(biǎo),或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com






金馬")

