


摘要:結合國內多軸電火花小孔加工(gōng)機床(chuáng)的特點,利用UG 建模工具獲取三維空間小孔的位置與矢量信息,巧妙地利用(yòng)接觸感知功能得到設備回轉軸的(de)回轉偏差,最後通過坐標變換獲得對隨機分布的空間矢量小孔精準定位的電火花加工方案。
關鍵詞(cí):電火花小孔加(jiā)工;坐(zuò)標變換;矢量編程
隨(suí)著航空發動機推重(chóng)比的(de)增大,渦輪前溫度不斷提高,對(duì)發動機燃燒室部件氣膜冷卻孔的應用越來越多;氣膜孔的設計向微小型(xíng)、隨機性發展,其角度分布與孔位分(fèn)布無(wú)規則可言(yán), 這無疑給燃燒室、渦(wō)輪導向(xiàng)器部件氣膜孔的精密(mì)微小孔加工帶來了巨大(dà)挑戰(zhàn)。對於直徑<1 mm 的小孔加工,機械加工(gōng)幾乎很難實現,隻能依靠電火花(huā)小孔加工,而氣膜
孔隨機性的位置與角度分布設計方案加之零件尺(chǐ)寸誤差,無疑給編程(chéng)人員帶來了巨大的工作量(liàng)。有些(xiē)複雜零件的空間孔位編程甚至無法實現,隻能采用標準件肉眼對孔替點的方法, 其編程效率低,某些零件的替點編程時間(jiān)長達3~4 天,且(qiě)加工後的孔(kǒng)位偏差大,根本無法滿足設計要求(qiú)的位置精度。本文(wén)通過對國產電火花小孔機床(chuáng)的結構分析,靈活應用坐標變換原理,找出了一種精準定位空間(jiān)矢量小孔位置的電火花小孔加工的編程方法(fǎ),滿足了(le)航空零件對氣膜孔位置度的精確要求。
1、 電火(huǒ)花(huā)小孔(kǒng)機的結構分析
圖1 是渦(wō)輪葉片氣膜孔空間矢量小孔(kǒng)的(de)電火花加工示意圖。該零件采用六軸電火花小孔設備進行加工,其各(gè)坐標軸定義如下:直線軸為X、Y、Z 軸(zhóu),正方向符合笛卡爾坐標係右手法則;旋轉軸為B 擺動軸、C 回轉軸,其中,B 軸繞Y 軸旋轉,C 軸疊加在B 軸(zhóu)上繞(rào)自身中心法(fǎ)線旋轉, 正方向是從軸所(suǒ)指處往原(yuán)點看的逆時針方(fāng)向,S 軸(zhóu)與Z 軸重合為進給軸,各坐標軸方向定義見圖(tú)2。

圖1 空間矢量小孔電火花加工示意圖
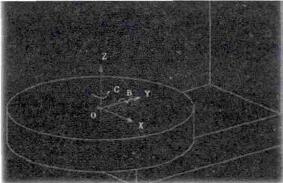
圖2 機床各坐(zuò)標軸示意圖
2、 三維(wéi)空間小孔的(de)加工方法
目前, 國外某些(xiē)廠家的設備已能實現UG 采點加(jiā)工(gōng),但國內大部分小孔機無此功能,對於複雜隨(suí)機分布的空間矢量小孔(kǒng),以往的加工工藝是通過替點完成程序編製工作。該方法存在(zài)以下問(wèn)題:① 編程工作在設備上完成,周期長、設備利用(yòng)率低,且需利用(yòng)肉眼觀(guān)測,使電極管穿過標準件原底孔,若孔數(shù)較少,仍(réng)可采納(nà);若孔數較多,則效率極低,且長
時間占用設備;② 孔的位置依(yī)靠肉眼觀測,不能滿足設計精度要求;③ 全部人工操作替點,出錯幾率極(jí)高。
基於上述問題, 本(běn)文利用零件的數學模型,通過UG 信息采集和坐標變換, 可將孔的位置進行精確定位。其加工方法為:首先,利用建模工具(jù)獲取小孔的坐標信息(X、Y、Z)與矢量信息(I、J、K);再通過(guò)運算得到B、C 軸的旋轉角度,旋轉(zhuǎn)B、C 軸,使空間矢量垂直(zhí)於XY 平麵;然後(hòu),通過坐標平移與旋轉(zhuǎn)變換,得出旋轉後的孔位三維坐(zuò)標值;最後,進給軸S沿豎(shù)直方向進給加工,從而實現空(kōng)間(jiān)矢量小孔的電火花加工工藝。
3 、加(jiā)工步驟
3.1 獲取點位空間(jiān)坐標點
(1)數學模型變換:對零件UG 數學模型進行變換,使機床坐標原點與零件數學模型的坐(zuò)標原點(diǎn)重合,零件模型的空間位置與零件在機床上的空間位(wèi)置重合。如(rú)圖3 所示,機床坐標原點在轉盤中心,零件中心點的X、Y 坐(zuò)標位(wèi)於機床原點,Z 軸坐標為(wéi)35,即坐標原點在UG 中(zhōng)的位置為(0,0,35)。
圖3 零(líng)件模型坐標變(biàn)換示意(yì)圖
(2)采集向量孔空間點位信息:通過UG 采集出坐標點的空間坐標(biāo)信息和向(xiàng)量坐(zuò)標信息。如圖4 所示,對於每一個空間小孔,作出(chū)孔的中心向量,並將向量基點定位於孔上(shàng)方。通(tōng)過UG 查詢工具找出該向量的(de)參(cān)數,得到在絕對ASC 中該向量的基點坐標(x,y,z)與(yǔ)方向向量(i,j,k)(圖5)。該數據為(wéi)小孔的基本(běn)數(shù)據,在後期加工中,編(biān)程人員隻(zhī)需采集(jí)小孔的基本數據(jù),然後進行輸(shū)入編輯即可實現(xiàn)小孔位置的精確定位加工。
圖4 小孔矢量位置(zhì)繪(huì)製示意圖
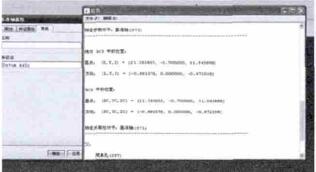
圖5 小孔基準(zhǔn)軸信(xìn)息(xī)采集示意圖
3.2 尋找擺動軸B 與回轉軸C 的位置偏差
一(yī)般情況下,由於機床製造精度的限製,若將回(huí)轉軸C 的回(huí)轉中心定義為坐標原點,那麽,擺動軸B 不可能嚴格繞Y 軸旋轉,其在XZ 平麵內有一個偏差值(a,b)(圖6),該偏差值將直接影響坐標變換時的孔位(wèi),因此必須找出該偏差值。
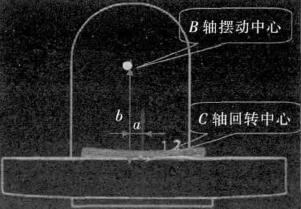
圖6 B 軸與C 軸回轉中(zhōng)心偏差示意圖
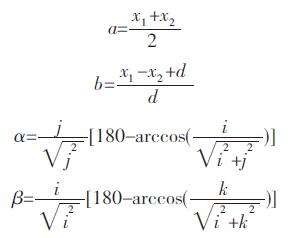
測量旋轉軸B、C 的中心偏差,可(kě)利(lì)用探針或電極通過接(jiē)觸感知功能快速得到(dào)。設探針或(huò)電極直徑(jìng)為d,首先找正回轉軸轉台與XY 麵(miàn)的平行,然後將B 軸坐標置“零”;逆時針將B 軸旋轉(zhuǎn)90°,利用接觸感知功能(néng)得到X 軸坐標值x1,再順(shùn)時針將B 軸旋轉90°,利用接觸感知功能得到X 軸坐標值x2,則兩個回轉中心的偏差a、b 分別是:
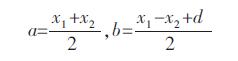
式中(zhōng):x1為B 軸逆時針旋轉90°得到的(de)測量值;x2為B 軸順時針旋轉90°得到的測量值;d 為測量探針或電極的直徑。
3.3 回轉軸旋轉後的孔位坐標變換
小孔的加(jiā)工方(fāng)法是通過B、C 軸(zhóu)的旋轉,將(jiāng)空間斜向(xiàng)量(liàng)變換為豎直(zhí)向量,然後通過S 軸(zhóu)的豎直(zhí)進給實現小孔加工。
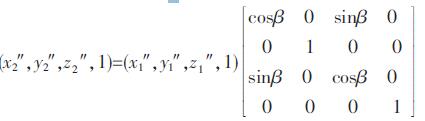
(1)對空間向量在(zài)XY 平麵內進行旋轉(zhuǎn)變(biàn)換。在(zài)第一步對小(xiǎo)孔信息采集時,得到了小孔的矢量基點信(xìn)息P(x,y,z)與方向信息(i,j,k)。首先需將該矢量變換為與XZ 平麵平行,方向指向(xiàng)X 軸負向,即需得到C 軸的旋轉角度α(圖7)與旋轉後新的矢量基點位置P′(x′,y′,z′):
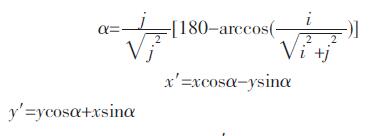
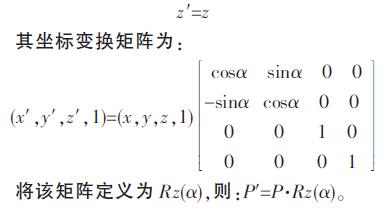
圖7 C 軸旋轉(zhuǎn)角度示意(yì)圖
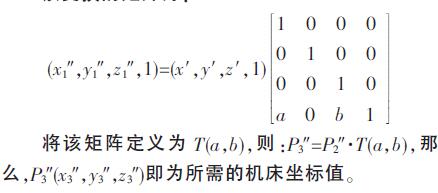
(2)對空間矢量(liàng)在XZ 平麵內進行旋轉變換。由於(yú)B 軸與C 軸回轉中心點在XZ 平麵內存在一個偏差(a,b),因此該變換涉及3 個級聯變(biàn)換,即2 個平移變換和1 個旋轉變換(huàn)。
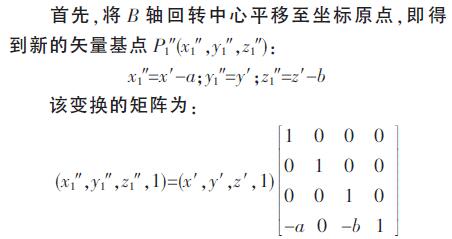
將該矩陣定義為T(-a,-b),則:P1″=P′·T(-a,-b)。
然後,對得到的新基點進行旋轉變換,即B 軸回轉β 角度(圖8),得到新的(de)矢量基點P2″(x2″,y2″,z2″):
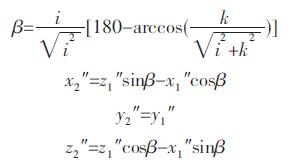
圖8 B 軸回轉角度β 示意圖(tú)
該(gāi)變換的矩陣為:
將該(gāi)矩陣定義為Ry(β),則:P2″=P1″·Ry(β)。最後,B 軸回轉中心移動至原位置,即得(dé)到新的矢(shǐ)量基點P3″(x3″,y3″,z3″):x3″=x2″+a;y3″=y2″;z3″=z2″+b該變換的矩(jǔ)陣為:
3.4 變換關(guān)係的級聯(lián)
將以上變換進(jìn)行矩陣點乘,得到:
P3″=P·Rz(α)·T(-a,-b)·Ry(β)·T(a,b)
令Tc=Rz(α)·T(-a,-b)·Ry(β)·T(a,b),則:
P3″(x3″,y3″,z3″,1)=P(x,y,z,1)·Tc
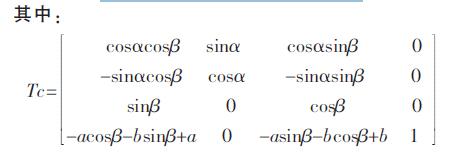
式中:x1、x2為B 軸先後旋轉至90°和-90°之後探針測量的機床X 軸坐標值;d 為探針(zhēn)直徑(jìng);(x,y,z)、(i,j,k)為通過UG 采集的(de)三維空間(jiān)小(xiǎo)孔的(de)點位信息與矢量信息。
4 、結論
本文通(tōng)過對電火花小孔機(jī)床的結構分析,結合UG 信息采集工具,通過三維空間坐標變換(huàn)關係,得到了加工(gōng)空間三維矢量(liàng)小孔變換矩陣Tc 和旋轉軸的回轉(zhuǎn)角度α、β。在加工(gōng)時,隻需通過對采集(jí)的數據采用(yòng)Tc 矩陣進(jìn)行坐(zuò)標變換, 同時用(yòng)公式進行角度(dù)運算,即可得到新(xīn)的坐標位置;機床各軸隻需根據(jù)新的(de)坐標點位置和角度進行旋轉移動,就能實現複
雜三維空間小孔的電火花加工。
如果您有機床行業、企業相關新聞稿件發表,或進行資(zī)訊(xùn)合作,歡迎聯係本網(wǎng)編輯部(bù), 郵箱:skjcsc@vip.sina.com


- 2024年11月 金屬切削機床產量數據
- 2024年11月 分地區金屬切(qiē)削機床(chuáng)產量數據
- 2024年11月 軸承(chéng)出口情況
- 2024年11月 基本型乘用(yòng)車(轎車)產量數據
- 2024年11月 新能源汽車產量數據
- 2024年(nián)11月 新能源汽(qì)車銷量情況
- 2024年10月 新能源汽車產量數據
- 2024年10月 軸承出口情況
- 2024年10月 分地(dì)區金屬切削機床(chuáng)產量數據
- 2024年10月 金屬切削機床產量數(shù)據
- 2024年(nián)9月 新能源汽車銷量情況
- 2024年8月 新能源汽(qì)車產量數據
- 2028年8月 基本型乘用車(轎車)產量數(shù)據
- 機械加(jiā)工過程圖示
- 判斷一台加工中心精度的幾種辦法
- 中(zhōng)走(zǒu)絲線切(qiē)割機床的(de)發展趨勢
- 國產數控係統和(hé)數控(kòng)機(jī)床何去何從?
- 中國的技術工人(rén)都去哪裏了?
- 機械老板做了十(shí)多年,為何還是小作坊?
- 機械(xiè)行業最新自殺性營銷,害人害己(jǐ)!不倒閉才
- 製(zhì)造業大逃亡
- 智能時代,少談點智造,多談點製造
- 現(xiàn)實麵前,國人沉默。製造業的騰飛,要從機床
- 一(yī)文搞懂數控車床加工刀(dāo)具補償功能
- 車床鑽孔攻(gōng)螺紋加工方法及工裝設計
- 傳統鑽削與螺旋銑孔加工工藝(yì)的區別(bié)