數控")



基於西門子 PLC 多軸伺服控製係統設計
2018-10-9 來源:安徽工程大學 電氣工程學院 作者: 徐禹翔, 徐曉光
摘 要:為(wéi)了滿足工業現場穩定、高精度的運動控製要求,以西門子新型模塊化高性能 S7-1200 係列 PLC 和鬆(sōng)下 A5 係列伺服控製器為控製核心,采(cǎi)用與伺服(fú)控(kòng)製器相配套的鬆下(xià)伺服電機,設計了 4 軸(zhóu)伺服運動控製係統,進行了控製係統的整體硬件設(shè)計,介紹了係(xì)統地址分配和數據傳輸、PLC 和伺服控(kòng)製器的接線和伺服(fú)參數設置、相關 PLC 程序設計、觸摸屏控製界麵設計.經調試運行表明:係統運行穩定、控製精度高,適用於工業機械手(shǒu)伺服控製等多種伺服控製場合,具有良好的應用價值.
關鍵字:運動控(kòng)製;可編程邏輯控製器;伺服控製
1、 前言
現代(dài)工業對(duì)於控製係統的響(xiǎng)應時(shí)間、響應速度、穩定性等(děng)性能指(zhǐ)標的要求越(yuè)來越高.根據實際項目設計需要,選擇了西門子 PLC、鬆下伺服(fú)電機及伺服(fú)控製器等集成 4 軸伺服控製係統,將 PLC 技(jì)術、伺服控製的(de)優勢有機結合起來,使運(yùn)動性能達到更好的水平.在由傳動製造(zào)逐漸(jiàn)轉向智能製(zhì)造的今天,多軸伺服的應用將越來越重(chóng)要,因此該係統有良好的應用價值.
2 、伺服控製係統的結構設計
2.1 控製方案的硬件選擇
控製係統的應用對象為(wéi)四自由度的龍門式堆焊機,采用模(mó)塊化(huà) PLC+ 伺服控製器進行運動控製(zhì).該(gāi)方案在係(xì)統的響應時間和控製精度、實時性、同步性能(néng)等方麵(miàn)不如專用(yòng)控製器(qì),但性價比高,適合定位間隔頻率和同步性要求一般的場(chǎng)合.根據項(xiàng)目實際的(de)係統要求,定位間隔時間(jiān)為幾十毫秒,同步要求不高,采用該方案(àn)滿足係統的需要,性價比較高.
2.2 西門子 S7-1200 多(duō)軸伺服係(xì)統的組成
係統硬件(jiàn)部分(fèn)選型:CPU1214C DC/DC/DC;西門子KIP1000 Basic 觸摸屏;鬆下 MHMJ022G1V 交流伺服電機,額定輸出功率 200W,額定轉速 3000r/m,額定電壓單相 / 三相 200V,配 20bit 增量式編(biān)碼器;伺服驅動器選用鬆下 MB-DK2510E 全數字交流伺服驅動器.一台 1214C DC/DC/DC CPU 集成了 4 路脈衝輸出接口,能夠控(kòng)製四個伺服控製器以達到控製四台(tái)伺服電機的目的,實(shí)現 4 個軸的精確定位,並實現多個電機(jī)的同時工作和同時停止.采用西門子 SIMATIC KIP1000 Basic 觸摸屏作為上位機,實現對伺(sì)服係統運行狀態的實時監控(kòng).S7-1200 在運動(dòng)控製中使用了軸(zhóu)的概念(niàn),通過對軸的組態,包括硬件接口、位置定義、動態特性、機械特性等,與相關的(de)指(zhǐ)令(lìng)塊(符合 PLCopen 規範)組合使用(yòng),通過對(duì)軸的組態可實(shí)現絕對位(wèi)置、相(xiàng)對位置、點動、轉速控製及自動尋找參考點的功能.CPU 輸出脈衝、向信號至 Servo Drive,伺服驅動器再將該信號處理(lǐ)後輸出到伺服電機(jī),控製電機加(jiā)減速、移動(dòng)到指(zhǐ)定位置;編碼器(qì)信號輸入到伺(sì)服驅動器形成(chéng)半閉環(huán)控製,用於計算速度與當前位置;用 PLC 內部的高速計數器測量CPU 上的脈衝輸出(chū),計算速度與(yǔ)位(wèi)置(zhì).
2.3 軟件平台
需要(yào)用到的相關軟件平台:TIA Portal V13、PANATERMV5.0 Manual.TIA Portal 是西(xī)門子公司開發的高集成度工(gōng)業組態軟件,提供了直觀易用的編(biān)輯器,可支持西門子係列PLC 編程(chéng).此外還為硬(yìng)件配置,網絡配置、診斷等提供(gòng)了通用的工程組態框架.PANATERM V5.0 Manual 是鬆下 A5 伺服驅動器專用的伺服參數配(pèi)置軟件,能夠實現(xiàn)伺服參數(shù)的快速設置,有效(xiào)縮短了伺服係統(tǒng)的開發周期.
3 、係統的地址分(fèn)配(pèi)及接線圖(tú)
係統為四軸伺(sì)服驅動設計,下麵以一個軸為例介(jiè)紹PLC 控(kòng)製器,伺服(fú)驅動器(qì)以(yǐ)及伺服電機的地址分配與連線.1214C DC/DC/DC 模塊為晶(jīng)體(tǐ)管輸出,CPU 模(mó)塊本體集(jí)成了一個 PROFITNET 以(yǐ)太網接口,用於編程、HMI 和(hé) PLC之間通信.該 CPU 固件版本為 V4.0,集成輸出點 Q0.0~Q1.1均可作為 PTO 脈(mò)衝串輸出和方向信號的輸出(chū)點,可在博圖組態軟件(jiàn)中自由組態(tài)確定脈衝串輸出(chū)點和方向信號輸出點.組態定義 Q0.0 為高速(sù)脈衝輸出連接(jiē)至伺服驅動器 X4-3 引腳,在 PTO 輸出模式下,Q0.0 能提供高達 100k HZ 的脈衝.Q0.1 連接至伺服驅動(dòng)器 X4-5 引腳,控製脈衝方向.組態(tài)定(dìng)義 Q0.2 為(wéi)伺服 ON 輸入連(lián)接到 X4-SRV-ON引腳,使(shǐ)能伺服驅動器.PLC 的 Q0.3 連接至伺(sì)服驅動器 X4-A-CLR,作為報警(jǐng)清除輸入(rù).伺服驅動器的(de)引腳 S-RDY+ 接至 I0.0,給 PLC 提供伺服準備就緒信號.
伺服驅動器的 INP+ 接口給 CPU 提(tí)供定位結(jié)束信號,I0.1 輸入點接收到信號(hào)後,CPU 停止脈衝(chōng)輸出,定位作業結束.其他信號的地址分配,如輸入參考點開關、位置監視(shì)開關(硬和軟件限位開關)等(děng)根據 PLC I/O 點和伺服驅動器 X4接口定義進行配置,在此不一一列出.
4 、係統軟件設計
4.1 PLC 軸工(gōng)藝對象組態
博圖組態軟件中定義的(de)“軸”工藝對象從用戶程序中收到運動控製命令(lìng),在運行時執行並監視執行狀態,起到用戶(hù)程序與驅動接口的作用.“驅動”表示伺服驅動加脈衝接口(kǒu)轉換器的機電單元.驅動是由 PU 產(chǎn)生脈衝對“軸”工藝(yì)對象操作進行控製(zhì)的.S7-1200 係(xì)列(liè) CPU 在運動控製中必須要對工(gōng)藝對象進行組態才能應用運動控製指令塊,其主要包括:
(1)參數組態:定義了軸(zhóu)的工程單位,如(rú)脈衝數 / 秒,轉 /分鍾),軟硬件限位,啟(qǐ)動 / 停止(zhǐ)速度,參考點等.
(2)控製麵板:用於調試驅動設備,測試軸和驅動功能.允許(xǔ)用戶在手動方式下實現參考點定位、絕對位置、相對位置、點(diǎn)動等(děng)功能.
(3)診斷麵板:在線方(fāng)式查看,用於顯示軸的關鍵狀態(tài)和錯誤(wù)消息.
4.2 伺服參數的設置
係(xì)統涉及的主要伺服參(cān)數設置值如下表 1 所示.
(1)項(xiàng)目中伺服(fú)電機主要用(yòng)於精確的定位控製,因而采用(yòng)位置控製模式 P.
(2)根據 CPU 與伺服的交互 I/O 信號的連接方式(shì),參考伺服驅動器用戶手冊,確定輸入輸出參數的設定值.
(4)依據位置控製精度來確定脈衝數和電子齒輪比.4.3 PLC 程序設計1200CPU 運動控製指令塊包括:MC_Power 係統使能指令塊、MC_Reset 錯誤確認指令塊(kuài)、MC_Home 回參考點 / 設置參考(kǎo)點指令塊等,足(zú)以滿足項目的運動控製(zhì)要求.使用功能塊(kuài)編寫程序(xù),能夠大大縮短項目程序的開發周期.
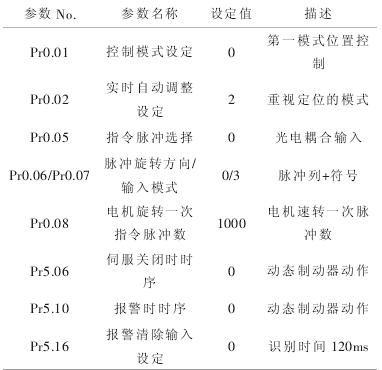
表1 M inas A 5係列伺服參數設(shè)置(zhì)
4.3.1 程序達成(chéng)的功能
具備(bèi)伺服故障(zhàng)檢測(cè)功能、伺服複位功能(néng)、伺服停止功能(néng)、伺服調試功能、伺服自動運行功能、伺服手動控製(zhì)功能、伺服電機位置(zhì)顯示功能(néng)等.
4.3.2 程序設計
程序結構框圖如圖 3 所示.主(zhǔ)要(yào)實現伺服的手、自動運行;伺服故障處理,即當伺服出現故障時能夠及時的取消全部運動動作,停止所有伺服;伺服故障取消後,重(chóng)新尋原點和機械回零等(děng)操作.
5、 人機(jī)界麵(miàn)設計
SIMATIC HMI 通(tōng)過 TIA Portal 軟件進(jìn)行畫麵(miàn)設計.依據係統的控製要求,將伺服控製顯示畫麵布置如圖 1 所示(shì).人機界麵主要功能按(àn)鍵有(yǒu):“參數設置”用來設置伺服運行的速度、位移量等;“伺服準備(bèi)完成”表示伺服尋原(yuán)點完成;“複位成功”表示機械(xiè)回原點完成;“手動自動(dòng)”表示(shì)手動調(diào)試和自動調試切換按鈕;“參數設置”用來對伺服運行的相關(guān)參數如速度、位移量等進行設置.將 HMI 畫麵(miàn)上的按鈕、指示燈等元件變量與 PLC 中的變量關聯,最後下載到 CPU 中,即完成人機(jī)界麵的組態(tài)編程.'
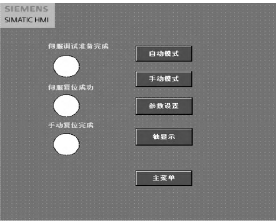
圖1 伺(sì)服調試顯示畫麵(miàn)
6、 結論
采用 S7-1200CPU+ 西門子 HMI+ 鬆下伺服驅(qū)動器的方案來實現多軸運動控製,能夠輕鬆實現多軸的準同步運行,經測試運行證明(míng)該係(xì)統結構合理,有較高的性價比,伺服定位精度高,可以針對不同的應用場合,做相應的調整即可快速使用.
投稿箱:
如果您有(yǒu)機床行業、企業(yè)相關新聞稿件發表(biǎo),或進行(háng)資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有(yǒu)機床行業、企業(yè)相關新聞稿件發表(biǎo),或進行(háng)資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信(xìn)息

業界視點
| 更多

行業(yè)數據
| 更多
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分(fèn)地(dì)區金(jīn)屬切削機(jī)床產量數據
- 2024年(nián)11月 軸承出口情況
- 2024年(nián)11月 基本(běn)型乘用車(轎(jiào)車)產量數據(jù)
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產量數據
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切削機床產量數(shù)據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新(xīn)能源(yuán)汽車銷量情況
- 2024年8月 新能源(yuán)汽車產量數據
- 2028年8月 基本型乘用車(轎車)產量數據
博文(wén)選萃(cuì)
| 更多(duō)