州數控")



基於意識任(rèn)務的機器人腦控係統
2017-8-2 來源(yuán):西北工業大學(xué) 作者:謝鬆雲,段緒,馮懷北(běi),孟雅,陳剛
摘要: 目前機器人(rén)的控製係統基(jī)本需要雙手遙控,對(duì)殘疾人等無法提供便(biàn)利,提出了一種全新的(de)腦電信號( electroencephalography,EEG) 控製機器人(rén)方法。采用無需外(wài)界刺激(jī)的意識任務誘發特征EEG,通(tōng)過便攜式腦電設備采集 EEG,經過特征提取與指令(lìng)分類,實現對機器人的控製。針對意識任務需要被試(shì)進行大量的訓練,設計了離線訓練係統。針對 EEG 信噪比較低的問題,研(yán)究了意識任務下(xià)EEG 處理方(fāng)法。最後設計了在線機器人(rén)腦控係統,利用想象(xiàng)左手運(yùn)動、想象右手運動、想象單詞(cí)生成分別控製機器人左轉、右轉與前進,利用眨眼信號控製機(jī)器人停止。實驗結果表明,從準確率、舒適度兩方麵(miàn)來看,基於意識任務的機器人腦控(kòng)係統有效實現了機器人的控製。
關鍵詞: 腦控係統; 機器人控製; Emotiv Epoc; 意識任務; LTCFB-CSP 算(suàn)法
腦控係統的核(hé)心是腦機(jī)接口( brain computer in-terface,BCI) 技術(shù),是(shì)測量(liàng)中樞神經係統的活動並(bìng)將它(tā)轉換成用來代替和增強中樞神經係統輸出的人工輸出係統。基於 EEG 的 BCI 技術應用(yòng)最為廣(guǎng)泛。BCI 分為主動式 BCI 與被動式 BCI。被動式 BCI 通過(guò)收集大腦以及其他生理信號來解析認知與心(xīn)理精神狀態,通常運用在(zài)高危以(yǐ)及需(xū)要注意力(lì)長(zhǎng)時間集中(zhōng)的地方。主動(dòng)式 BCI 通過安裝(zhuāng)在頭皮(pí)固定位置處的電極,檢測到相應的神經元活動彌散到頭皮上的(de)電勢(shì)分布,然後解讀電勢(shì)信號(hào)的分布,解碼一些(xiē)運動意圖信息,將這些運動意圖信息相應編碼,就可以控製外部的(de)設備,為人們提供一種全新的與外界交互的能力。主動式 BCI 最常用於殘疾人輔助設(shè)備,如腦控輪(lún)椅、腦控(kòng)義肢、通過 EEG 控製經顱磁刺激對受損的肌肉進行康(kāng)複治療與殘疾人(rén)輔助機器人等。目前,讓 BCI 新技術走出實驗室,服務廣大有需求的患者(zhě)和特殊的人群(qún)成(chéng)為 BCI 研究的(de)新挑戰[1]。
想象運(yùn)動與(yǔ)想象單詞生成都是意識任務的一種。想象(xiàng)運動表示有(yǒu)意識的想象一個運動意圖。可以在(zài)沒有外界刺激的情況下誘發出事件相關同步 /去同步特征波。被試在一段時間內根據提示(shì)的首字母拚寫(xiě)一(yī)連串單詞,拚寫的過程是由幾個不同的腦區同時作(zuò)用的結果。如拚(pīn)寫單詞“top”時,顳葉語言區、額葉中(zhōng)回區和視覺區等大腦相應區域會被激(jī)活,這就是(shì)想象單詞生成所解碼的特征波[2]。根據(jù)以上研究背(bèi)景,本文首先給出腦控係統的總體方(fāng)案,包括(kuò)離線(xiàn)訓練階(jiē)段與(yǔ)在(zài)線係統設計; 利用功(gōng)率譜估計與表麵拉普拉斯拓撲圖證明了(le)意識任務下 EEG 的特征; 再對 EEG 處理方法進行研(yán)究; 最後通(tōng)過在(zài)線實驗評估了係統的性能,使被(bèi)試利用想象運動、想象單詞生成等意識任務(wù)分別(bié)控製機器人的不同動作。
1.基於意識任(rèn)務的機器人腦控係統的總體方案
基於意識任(rèn)務的機器人腦(nǎo)控係統分為離線訓練階段與在線機器人控(kòng)製階(jiē)段。利用想象左手運動、想象(xiàng)右手運動、想象單詞生成等分別(bié)控製(zhì)機器人左轉、右轉與前(qián)進。在訓練階段通過特定的實驗範式與結果反饋使被試誘發出的(de)意識任務特征 EEG 更加穩定與準確,訓練完成後對離線數(shù)據進行(háng)處理,計算出每個被試特(tè)定的空間濾波器投影矩陣與分類(lèi)器模型。在線實驗階段,在 BCI2000 平台(tái)的基礎上配置各個模塊,設計實驗並完成(chéng)對(duì)機器人的控製。係(xì)統的總體方(fāng)案示意流程如圖 1 所示。
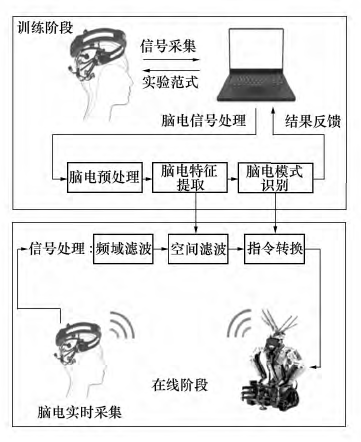
圖(tú) 1 基(jī)於意識任務的機器人腦控係統
1.1 離線訓練(liàn)階段
實驗範(fàn)式如圖 2 所示[3],被試聽(tīng)到(dào)“beep”提示音後,提示一(yī)個(gè)實(shí)驗試次的開始(shǐ),過 2 s 會聽到隨機出(chū)現的“lefthand”來提示被試想象左手運(yùn)動、“right-hand”來提(tí)示想象右手(shǒu)運動,或提示要拚寫單詞的(de)首字母的聲(shēng)音,這時被試開始執行(háng)意識任務,任務持續時間為 4 s,緊接(jiē)著為 4 s 試(shì)次間(jiān)休息。需要注意的是,當被試聽到“beep”提示音後(hòu)須集中注意(yì)力(lì),身體各部分不能動,當任務提示聲響起時被試不能眨眼。實驗共包含 60 個試次,每種任務出現(xiàn) 20 次。每次任務結束時屏幕上會出現(xiàn)“YES”或“NO”的反饋,“YES”代表想象正確,“NO”代表想(xiǎng)象(xiàng)錯誤。當被試的訓練正確率達到(dào) 70%以上時,訓練結束,帶事件標簽的 EEG 數據被保存在計算機中。接著用離線數據中執行任務的部(bù)分做離(lí)線分析。首先分析意識任務下 EEG 的特征。在初級感覺運動皮(pí)層(céng)不(bú)處理感覺信息或運動輸出時,會表現出一種大(dà)約 8~12 Hz 頻率與 18~25 Hz 頻率的(de)節律性運動,這種(zhǒng)運動被稱為 μ 節律(lǜ)與(yǔ) β 節律。當單邊
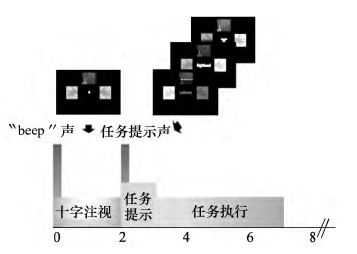
圖 2 訓練階段的實驗範式
肢體運動或想象運動時,對側初級(jí)感覺運動皮層區域活躍起來,μ 與 β 頻率的節律性活動表現為幅度的降低,稱為(wéi)事件相關去同步(bù)( event-related desyn-chronization,ERD) ; 反之,其同側皮(pí)層(céng)區域受到(dào)抑製,μ 與 β 頻率的(de)節律性活動表現為幅度(dù)升高,稱為事(shì)件相關同步( event-related synchronization,ERS) 。想象運動因為其較明顯(xiǎn)的 ERD/ERS 現象被用(yòng)在BCI 技術中。想象單詞生成時,不同腦區的激活在特征上表(biǎo)現為相應腦區 α 頻段的升高[4]。
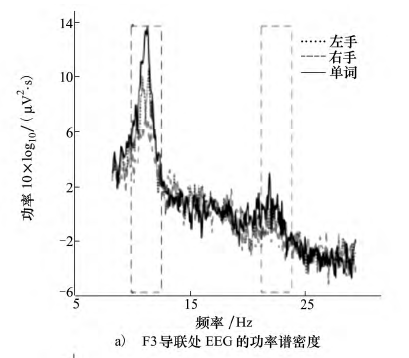
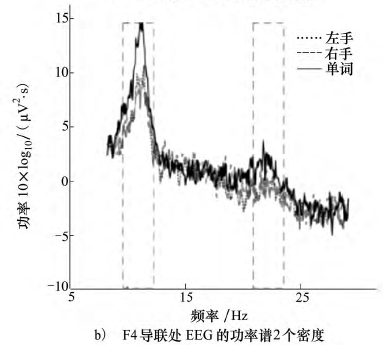
圖 3 3 種任務下 2 個導聯處(chù) EEG 的功率譜密度
利用離線數據計算 3 類意識任務的功率譜估(gū)計,如圖 3 所示,被試在單詞意識任務(wù)下 α 節律的功率遠高於其他 2 種任務。在大腦左半球 F3 導聯處,被試想象左手運動(dòng)時 μ 節律與 β 節律的功率都略高於想象右手運動。在大腦右半(bàn)球 F4 導聯處,μ 節律與 β 節律的功率表現兩者正好相(xiàng)反。圖 4 為(wéi)被試想象運動時(shí)的表麵拉普拉斯 ERD 拓撲圖,每個圖(tú)代表4 s 腦電(diàn)信號的平均值,當進行一側手部想象運動時,對側初級感覺運(yùn)動區域出現 ERD 現象。以(yǐ)上分析證明(míng)了本文采用的 Emotiv Epoc 作為便攜式采集設(shè)備的可行性。
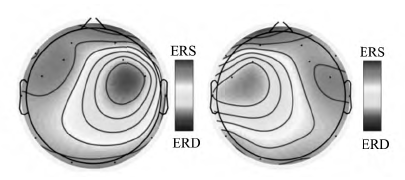
圖(tú) 4 左手想象運動(dòng)( 左) 與右手(shǒu)想象運(yùn)動(dòng)( 右) 的 ERD 拓撲圖
1.2 在線機器人腦控係統設計
如圖 1 中在線階段所示,係統中(zhōng)硬件(jiàn)包括腦電(diàn)采(cǎi)集設備 Emotiv Epoc,一台筆記本電腦,以及一個樂高(gāo)機器人。軟(ruǎn)件包括 BCI2000 與 MATLAB。整個係統由腦電設備采集信號,筆記本電腦處(chù)理信號並輸出指令控製機器人運動。由 BCI2000 平台完成信(xìn)號接收、信號處理和(hé)應用驅動之間的通信。BCI2000包括以下 3 個模塊。
1) 數據采集模塊: 將 Emotiv Epoc 記錄的信號經過預處理後打包傳遞給信號處理模塊。信號的導聯數目為 14,每次發(fā)送的數據包長度設置為 3 s。每段數據都經過 1~70 Hz 帶通濾波器與 50 Hz 陷波濾波器去除工頻幹擾。
2) 數據處理模塊: 此模塊通過調用(yòng) MATLAB 腳本來執行。將訓練階段訓練好的投影矩陣 W 與分類器模型傳遞給在線處理過程。在線(xiàn)腦電數據首先經過帶(dài)通濾波(bō)器組,再通過空間濾波器 W,對濾波後數據按維度求方差,最後通過分(fèn)類器模型進行在線分類(lèi),處理(lǐ)過程運算(suàn)時間約 1.5 s,完全可以在下一個數據包到(dào)來之前完成運算(suàn)。
3) 機器人模塊: 將數(shù)據處理模塊輸出的(de)指令通過機器人(rén) MATLAB 工具包編程轉換,轉換後(hòu)的指令通過 WIFI 傳遞給機器人,控製機器人進行動作。預設機器人直線行走速度為 0.2 m/s,並(bìng)預設路線。包含 8 個左轉彎、8 個右(yòu)轉彎、3 次(cì)停止與 3 次直線(xiàn)行走。
2.基於意識任務(wù)的腦電信號處理方法
的研究與實(shí)現意識任務下(xià)特征 EEG 的特征提取與模式識(shí)別算法的優劣直接影響了機器人腦(nǎo)控係統的(de)性能。算法部分采用離線訓練所得數據進行研究,並將算法運用於在線腦控係統(tǒng)中,每個被試都需要(yào)用離(lí)線(xiàn)數據計算(suàn)出(chū)特定的算法參數。意識(shí)任 務 下 特 征 EEG 的 特 征 提 取 方 法 有Pwelch 功率譜估計分類方法、空間濾波器方法、交叉 相 關(guān) 方 法 等。 共 空 間 模 式 (common spatialpattern,CSP ) 是(shì)一種空間濾波器,用 CSP 方法可以從多導聯腦電信號中計算出頭(tóu)皮(pí)的特定激活區(qū)[5]。它被證明在(zài)分類想象運動(dòng)時有很好的分類效(xiào)果(guǒ)。本文將基(jī)於局部時間相關的濾波器組共空間模式算法( local temporal correlation based filter bank commonspatial pattern,LTCFB-CSP ) 運用在 3 種任務的特征提取中。方案流程圖如圖(tú) 5 所示,具(jù)體步驟如下:
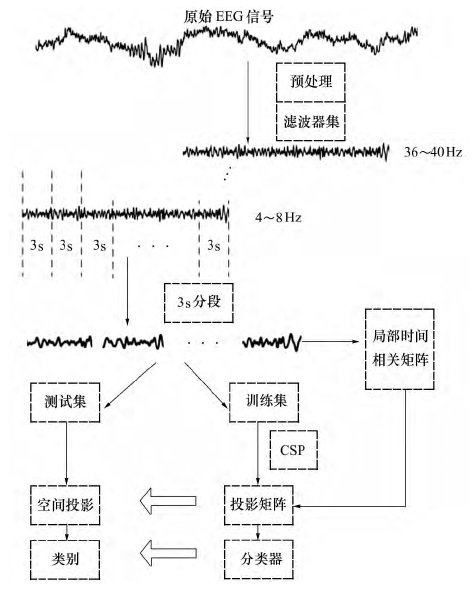
圖 5 意識任務下特征 EEG 的信號處理方法
第 1 步 預處理。使(shǐ)用 EEGLAB 工具包對數據(jù)進行預處理(lǐ),包括(kuò)壞導聯去(qù)除(chú)與去偽跡兩步,設計9 個切比雪夫Ⅱ型濾波器將整段數據濾(lǜ)波後得到 9段子信號,濾(lǜ)波器參數(shù)為最優(yōu)化參數,對每個子信號的 2~12 個采樣點(diǎn)內腦電數據求相(xiàng)關。
第 2 步 特征提取。打亂試(shì)次間順序,70%作為訓練集,30%作為測試集; 采用成對組合方法將(jiāng)三分類問題轉化為二分類問題後通過(guò)共空間模式方法求出投影矩陣,將腦電信號投影到維數(shù)為 6 的(de)空間中(zhōng),並構造出特征(zhēng)矩陣。
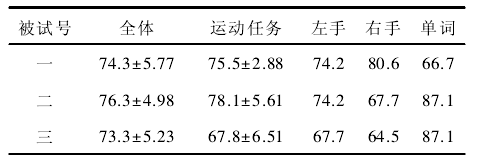
第 3 步 指令分類。采用支(zhī)持向量機作為分類器,核函數選擇線性核函數。對線性核函(hán)數中的懲罰因子 c 參數進行優化。如表 1 所示,最終(zhōng)的分(fèn)類結果經過 10 次隨機交叉驗證得出。
表 1 3 類(lèi)意(yì)識任務(wù)的最終分類準確率 /%
將 LTCFB-CSP 算法與其他 3 種 CSP 改(gǎi)進算法(fǎ)FBCSP 、LTCCSP 、RCSP-A 比較,結果如圖 6 所示,可見就分類準確(què)率而言,LTCFB-CSP 算法有更優越的(de)性能[5-6]。
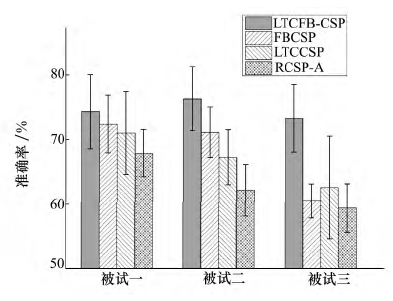
圖 6 不同算法對意識任務下特征 EEG 的分類結果
3.機器人腦控係統(tǒng)實現與在線實驗結果
如圖 7 所示,實驗場所為室(shì)內 3 m×4 m 空地中,實驗選擇晚上相對安靜的環境。實驗前給被試(shì)佩戴 Emotiv Epoc 腦電(diàn)帽,信號采樣率設(shè)為 128 Hz,參考(kǎo)電極(jí)為左側乳突。讓被試舒適(shì)地坐在椅子上,要求被試熟悉機器人的行(háng)走路線(xiàn)並記住指令的順序。選擇經過訓練後的一名被試進行在線實驗(yàn),被試性別男,年齡 24 歲,視力通過佩戴(dài)眼鏡矯正至正常視力。啟動(dòng) BCI2000 平台,配置好相關參(cān)數後開始實驗。實驗過程中(zhōng),被試通過意識任務(wù)與眨眼肌電信號控製機器人繞過障礙物,走完預定路線(xiàn)。根據 4 次實驗測試(shì)驗(yàn)證,本係統基本能(néng)有效地控製(zhì)機器人完成預設的路線。
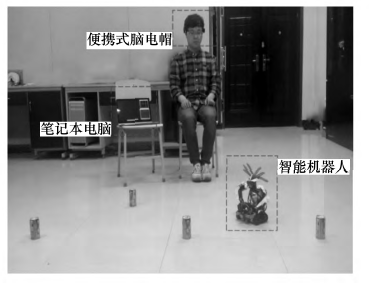
圖 7 基於腦機接口的機器人係統實驗實例
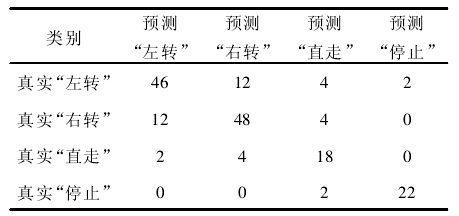
1) 準(zhǔn)確率。Kappa = ( acc-1 / N) / ( 1 - 1 / N) 。acc代表指令執行的正確率,N 表示要分類的(de)特征腦電(diàn)類別數(shù)。如表 2 所示,實(shí)驗一共進(jìn)行了 8 次。其中“左轉”指令一共執行了(le) 64 次,正確 46 次; “右轉”指令一共執行了(le) 64 次,正確 48 次,“直走”指令執行了 24 次,正確 18 次(cì); “停止”指令執(zhí)行了 24 次,正確 22 次。每(měi)種指令的正確(què)率分別為 71.8%、75%、75%、91. 7%。4 個(gè)指令的平均(jun1)準確率為 78. 3%,Kappa = 0.71。3 類意識任務控製(zhì)指令的平均準確率為 73.9%。
表 2 在(zài)線實驗中每個指令的分類結果
2) 舒適度。實驗結束後,根據被試的實驗反饋,表示訓練階段時間適中,無需視(shì)覺刺(cì)激; 在線實驗階段腦電帽較舒適,意識任務(wù)與機器人的真(zhēn)實運動較類似,容易(yì)想象。因此(cǐ)本論文搭建的腦機(jī)接口係統舒適度高。
4.結論
針對腦機(jī)接口中腦電設備的便攜問題與(yǔ)腦機接口(kǒu)係統的(de)實用性問題,證明了意識任務下 EEG 具有較明顯的特(tè)征,研究了特征 EEG 處理(lǐ)方法並將該方法運用於在線機器人(rén)腦控係統(tǒng)中(zhōng),設計了基於意識任務的(de)便攜式(shì)機器人腦控係統,最後搭建在線係統的各個模塊,設計並完成實驗。機器人腦控係統準確率達到了 78.3%,響應時間控製在 3 s,被試通過(guò)意(yì)識任務繞過障礙物,完成預設的路線。
投稿箱:
如果您有機(jī)床(chuáng)行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機(jī)床(chuáng)行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相(xiàng)關信息

業界視點
| 更多

行業數據
| 更多(duō)
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分(fèn)地區金屬切削機床產量數據
- 2024年11月 軸承出口情況(kuàng)
- 2024年11月 基本(běn)型乘用車(轎車)產量數據
- 2024年11月(yuè) 新能源汽車產量數據
- 2024年11月 新能源汽車銷量情(qíng)況
- 2024年10月 新能源汽車產量數據(jù)
- 2024年(nián)10月(yuè) 軸承出口情況
- 2024年10月 分地區金屬切削機床產量數據
- 2024年10月 金屬切削機床(chuáng)產量(liàng)數(shù)據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本型乘用車(轎車)產量數據