


摘要: 根據(jù)萬能龍門導軌磨床實現高效高精密自動化加工的需要,研究開發了一種砂(shā)輪自修整係統(tǒng)。在建(jiàn)立砂輪及其修整參數化(huà)模型的基礎上,依據萬能龍門導軌磨床磨削過程推導了實現砂輪自動修整的運動軌跡表達式。在VC + + 環境中通過對ini 文件的讀(dú)寫操作實現對砂(shā)輪參數、係統配置參數動態記錄和讀取,實現砂輪(lún)全自動修整和磨床的高(gāo)度自動化加工。
0 引言
在磨削過(guò)程中,砂輪的磨損經過了磨耗磨損、磨粒磨損、脫落(luò)磨損三個周期後,砂輪表麵的磨粒會磨鈍、磨粒與磨粒之間間隙(xì)被切屑堵塞(sāi)、磨粒脫落不均勻等,為(wéi)了得(dé)到好的表麵光潔度和型麵需要對砂輪進行修整。傳統磨削加工中對砂輪進行修整大部分是通(tōng)過手工進行,砂輪修整需要重新進行找正、加工。砂輪修整(zhěng)精度、自(zì)動化程度和生產效率(lǜ)都較低,對操作者的技能水平依賴性較高,實現(xiàn)砂輪自動修整(zhěng)是實現磨削高效、高精(jīng)密自動(dòng)化加工的關鍵 。根據某企業開發砂輪自動檢測、自(zì)動修整、全自動化加工的高效高精密龍門萬能導軌磨床的需要,研究了一種砂輪自修整係統。通過參數化建模方法,根據萬能龍門導(dǎo)軌磨床的磨削工藝建立了周邊磨頭和萬能磨頭自動化(huà)修整的模型(xíng),推導出周(zhōu)邊磨頭修整器和萬能磨頭修整器修整軌跡的參數化表達式,可滿足萬能龍門導軌磨床自動測量→ 自動整修砂輪→ 自動粗磨→ 自動(dòng)整修(xiū)砂(shā)輪→自動精磨→自(zì)動整修砂輪→……可定製的循環自動化(huà)磨(mó)削加工工藝。
1 、周邊磨頭自動修整
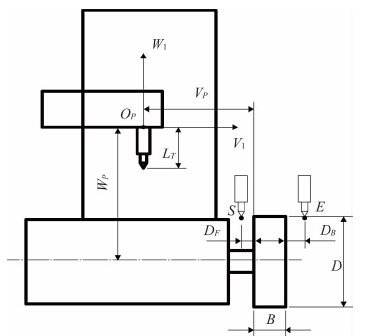
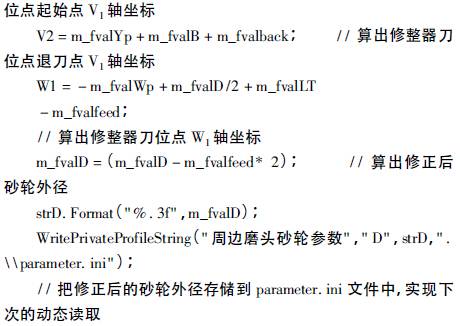
圖1 周邊磨頭修整器(qì)示意圖
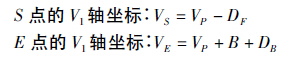
如圖1 所(suǒ)示為周邊磨頭及其修整器,周邊(biān)磨頭修整器(qì)采用兩(liǎng)個軸分別控製砂輪徑向和軸向運動實現砂輪的自修整。V1軸作水(shuǐ)平(píng)運動控製(zhì)周邊磨頭修整器軸向運動,W1軸(zhóu)作豎直運動控製周邊砂輪的(de)修(xiū)磨量。假定P 點為(wéi)砂輪修(xiū)整器的參考點,Vp 表示修整器參考點與砂輪左端麵的距離,Wp 表示修整器參考點與砂輪旋轉軸(zhóu)線的距離。DF表示砂(shā)輪修整器起始點與砂輪(lún)距離,DB表示砂輪修整器退刀點與砂輪端麵的距離,LT表示刀具長度。D 表示砂輪直徑,B 表示砂輪寬度。根據周邊砂輪結構(gòu)及修整過程(chéng)中修整(zhěng)器相對砂輪的(de)運動,以P 點為原點,建立周邊砂輪坐標係V1OPW1,可推(tuī)導出周邊砂輪修整器修整砂輪的參數化坐標方(fāng)程。
2、萬能磨頭自動修整
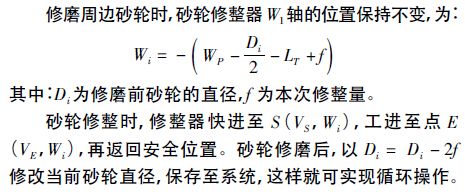
圖2 為萬能磨(mó)頭及其修整器 。萬能磨(mó)頭修整器采用四軸對進行砂輪(lún)修整(zhěng),可實現各種傾角的砂輪的修整。y1軸實現萬能磨頭修整器水平運動,z1軸(zhóu)實現萬能磨(mó)頭修整器豎直運動,A1萬能磨頭修整器角度(dù)轉動,A2萬能磨頭修整器角度轉動(dòng)( 主要用途消除間隙) 。假設P 點為(wéi)砂輪修整器的參考點(diǎn),Yp表示參考點與砂輪旋轉軸線的距離(lí),Zp表示修整器參考點與砂輪的距離。D 表(biǎo)示砂輪的外徑(jìng),B 表示(shì)砂(shā)輪寬度,u 表示斜麵砂輪的(de)端麵寬(kuān)度,表示V 型砂輪兩斜麵間的夾角。DS表示刀尖起始點與砂輪斜麵距離,DE表示刀尖退刀點與砂(shā)輪斜麵距離。L1表示刀位點(diǎn)到刀具軸線的距離,LT表示刀尖點到修整器轉動軸軸線的距離。根據雙斜麵砂輪的結構及修整過程中修整器相對砂輪的運動,以P 點為原點,建立萬能磨頭砂輪修整坐標。
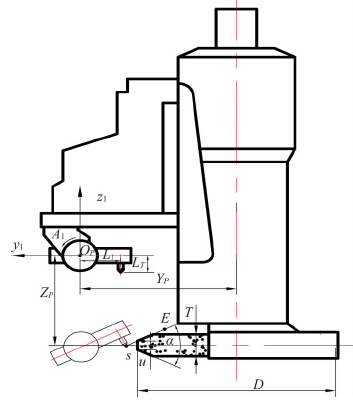
圖2 萬能(néng)磨頭砂輪修(xiū)整器各軸之間參數
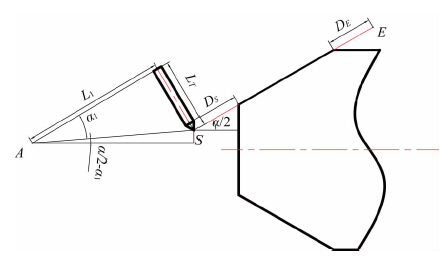
圖3 刀(dāo)位點與砂輪刀具之間參數關係
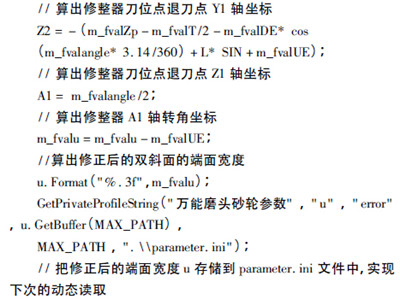
係Y1OPZ1。圖3 為砂(shā)輪(lún)修整時刀位點A 與砂輪刀具之間(jiān)的參數關係,由此可推導出萬能磨頭(tóu)修整器修整砂輪的參數化(huà)坐標方程。在S 點時y1軸坐標為:

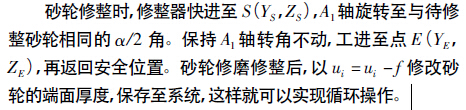
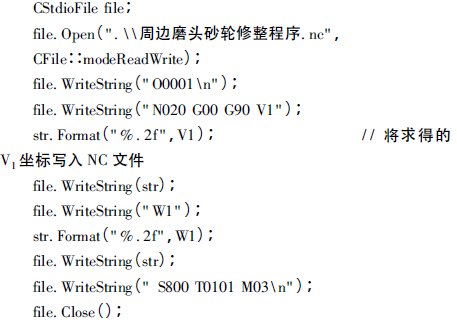
在(zài)VC + + 環(huán)境(jìng)中通過對ini 文件的讀寫操作實現對砂輪參數、係統配置參(cān)數動態記錄和讀取[5,6]。根據以上兩步提出的砂輪自動修(xiū)整(zhěng)的運動軌跡表達式(shì),動態計算出(chū)修整器修整時的參(cān)數化坐標(biāo)。使用CstdioFile 類定義一個file 對象,調用(yòng)其Open 函數打開(kāi)NC 文件[7]。運用file 對象調用其WriteString 函數分別把字符串寫(xiě)入到打開的NC文件中就生成了砂輪的自修整程序。
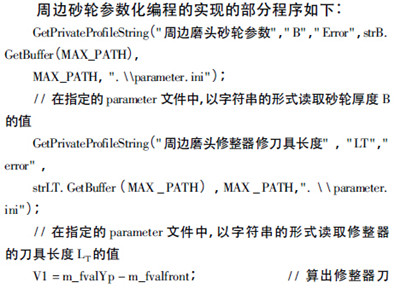

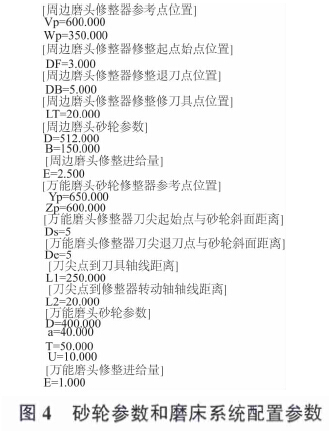
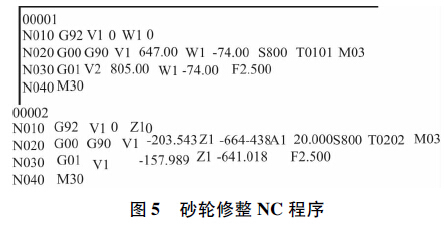
運行程序後,打開paramete. ini 文件可得到如圖4 所示的砂輪參(cān)數和係統配置參數。參數(shù)化編程後,根據參數坐標的計算求解,生成砂輪修整器的數控NC 程序,如圖5 所示(shì)。
4 、結論
在建立砂輪及其修整參數化(huà)模型的基礎上,推導出實現砂輪自動修整的運動軌跡表達式(shì)。在Visual C + + 6. 0環境中通過對ini 文件的讀寫操(cāo)作實現了對導軌磨床的係統配置參數以及砂輪(lún)參數的(de)動態讀取和記錄,並(bìng)且運用CstdioFile 類對數控NC 文件的(de)讀寫操作,自動生成砂輪全自(zì)動修整的數控NC 程序(xù),從而實現砂輪全自動修整和提(tí)高磨床的自動(dòng)化加工水平。
如果您有(yǒu)機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係(xì)本網編輯部, 郵箱:skjcsc@vip.sina.com

調查")
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分地區金屬切削機床產量數據
- 2024年11月 軸(zhóu)承出口情況(kuàng)
- 2024年11月 基(jī)本型乘用車(轎車)產量數據
- 2024年11月 新能源汽車產量數(shù)據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能(néng)源汽車產量數據
- 2024年10月 軸承(chéng)出口情況
- 2024年10月 分地區金屬切削(xuē)機床產量數據
- 2024年10月 金屬切削機床產量數據(jù)
- 2024年9月 新能(néng)源(yuán)汽車(chē)銷量情況
- 2024年8月(yuè) 新能源(yuán)汽車產(chǎn)量數據
- 2028年8月 基本(běn)型乘用車(轎車(chē))產量數據