



1.5億美元,打造機器人“未來工廠”
2019-7-29 來源:轉(zhuǎn)載 作者:-
據了解,abb公司參與了此次盛會,其雙臂工(gōng)業機器人YuMi吸引了眾多(duō)目光。此外,ABB還分享了許多厲害的(de)“黑科技”:大數據(jù)“養蜂”、渡輪無人駕駛(shǐ)、機器視(shì)覺伺服……
7月25日(rì),2019世界工業互(hù)聯網大會暨中國(青島)國際軟件融合(hé)創新博覽會在山東青島拉開了帷幕。
大會以“智聯互通,智享共贏”為(wéi)主題,緊扣高端製造業+人工智(zhì)能、工業互聯網和5G等熱點(diǎn)話題,攜手眾多國(guó)內外行業大咖共同(tóng)解讀前沿技術應用與行業發展趨勢。

全球500強企業之一的ABB公司參與了(le)此(cǐ)次盛會,並攜多款明星產品亮相,展示了其最新的電氣、工業(yè)自動化、運動控製、機器人及離散自動化和電力產品(pǐn)與解(jiě)決方案。
機器人“抓蝦”
大(dà)數據“養蜂”
渡(dù)輪無人駕駛
機器視覺伺服
……
還有哪些厲害的黑科(kē)技?我(wǒ)們一起來看看!
AI技術:
讓機器人抓蝦不再“抓瞎”
在青島(dǎo)國際會展中心1號館右(yòu)側(cè)C位是一個超過430平米的巨幅展(zhǎn)台。
展台的最中央,是ABB第(dì)一款真正實現人機協作的雙臂(bì)工業機器人YuMi。

在工作(zuò)原理上,機器人正從“機器”真正轉向“人(rén)”。
YuMi能夠與人類(lèi)近距離協作,尤其能夠滿足消費電子行業對柔性生產和(hé)靈活製(zhì)造的需求,從而提高生產效(xiào)率。

值(zhí)得一(yī)提的是,在圖像識別等深度學習AI算法的加持下,YuMi等工業(yè)機器人能夠執行此(cǐ)前需要人類來做的(de)更複(fù)雜的(de)任務。

比如,基於深度學習與生物特征的目標點識別方法,ABB成功(gōng)實現了機器人抓蝦的操作。
目前在工廠的自動剝蝦生產線上,有一(yī)個關鍵(jiàn)環節目前仍完全(quán)由人工操作,就是(shì)對於蝦(xiā)身(shēn)的抓取與(yǔ)精確放置(zhì)。
這(zhè)極大地(dì)限製(zhì)了生產線的速(sù)度、精度、穩(wěn)定性與生產效率,而且工作本身枯(kū)燥無味,浪費人力時間。
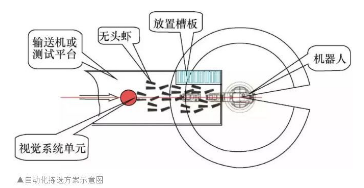
在傳統的自動化方案中,視覺係(xì)統(tǒng)與機器人的配合至關重要。視覺係統單(dān)元對流水線上移動的蝦身進行實時拍攝,同時內置算法識別出目標點位置,並引導機器人(rén)進(jìn)行抓取與放置,從而(ér)替代人工操作,實現整條(tiáo)生產(chǎn)線的全自動化。
然而,在實際(jì)應用中,由於蝦的形態各異,對人來說十分簡單的識別任務,對於傳統的圖像特征提取算法就變得非常困難。

麵對形態各異、尺寸不一,紋(wén)理顏(yán)色等特征也不同的蝦,單一的圖像處理方法隻能準確識別部分樣本的關節點,很(hěn)難達到(dào)工業應用的高(gāo)精度(通常超過95%)要求,而(ér)一個好的解決方(fāng)案不僅要能滿(mǎn)足工業應用的精度(dù)要求,還需要將識別失敗樣本的誤差控製在(zài)穩定範圍內,便於工廠的後續處理。
圖像識別的深度學(xué)習算法,為解決(jué)這一問題(tí)提供了新的思路。
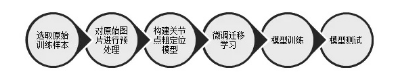
ABB的(de)研究人員提出結(jié)合深度學習與生物特(tè)征識別的(de)目標(biāo)點定位方法,並在實(shí)際數據上進行了模型訓練與性能驗證。
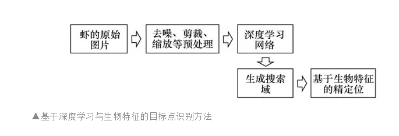
首先將蝦的圖像進行預處(chù)理後輸入深度學習模型得(dé)到粗定(dìng)位點,之後對(duì)蝦的(de)位姿進行歸一化並提取輪廓線,基於對搜索域內(nèi)的輪廓擬合與特征點檢測以精確定位目標點。
通過在蝦的(de)實測數據上進行建模與測試,發現深度學習模型較難直接給出精確的(de)目標點位置,但可以提供與目標(biāo)點較接近的粗定位點,從而得到能涵蓋目標點的搜(sōu)索域。
之後利用生物特征(zhēng)識別(bié),基於輪廓線提取與擬合(hé),可以(yǐ)在(zài)此搜索域內精準地定位目標點。
實驗結果證明了該方法的有效性:在包含1000張實(shí)測樣本的測試集上,整體方案的識別率達到97.2%,可初步滿足實際工業應用的要求。
視覺伺服技術:
低成本相機也可(kě)進行高精度跟蹤
展台的中央,ABB展(zhǎn)示了視(shì)覺伺服技術高效追蹤演示(shì)站。

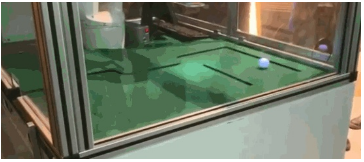
展(zhǎn)櫃前,演示者通過麵(miàn)板操控白色小(xiǎo)球做出高速且任意的運動,小球上方(fāng),一(yī)台IRB1200工業機器人能對目(mù)標小球進(jìn)行(háng)實時有效的跟蹤。
值得注意的是,該視覺伺服控製(zhì)方法對相機要求極低。
即使相機幀率低至16FPS(幀/秒),工業機器人仍能對高速運動中的(de)物體(tǐ)進行動態高精度跟蹤,接(jiē)近采用高速相機的所獲得高速跟蹤的精度。
近年來,很多研究將視覺伺服技術用於抓取快速(sù)移動的物體,係(xì)統的響應速度之快,甚至可以用於(yú)抓取飛(fēi)行中(zhōng)的物體(tǐ)。一般(bān)整個控製係統包括(kuò)一套多相機運動捕捉係統、一個即時運(yùn)動觀測器,以及一(yī)個即(jí)時運動重規劃控製器。
視覺伺服技術在諸多工業場景(jǐng)中都有廣泛的應用前景,但高速相機的較高成本也(yě)使得一般工業用戶望而卻步。
如(rú)何利用低(dī)成本相機實現快速精準地跟蹤抓取移動中的物體,以便將視覺伺(sì)服(fú)技術用於一(yī)般工業(yè)場景,成為了需要解決的(de)現實問題。
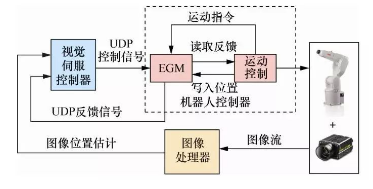
為(wéi)此,ABB中國研究院的科學家們提出了一種新的視覺伺服控製方法,借助(zhù)ABB EGM模塊,使(shǐ)得工業機器人(rén)隻需搭配較低幀率相機,即能完成(chéng)高速物體的精確跟蹤。
該方(fāng)法的特點在於視覺伺服所需的反饋信號不(bú)僅僅來(lái)自相機采集的圖(tú)像信息,而且還融(róng)合了機器(qì)人的實時(shí)運動信息。
這(zhè)一方法將機器人的運動反饋(kuì)與視覺傳感信號相(xiàng)融合,用來產生機器人的運動控製信(xìn)號。與傳統的方法(fǎ)相比,新方(fāng)法提高了視覺伺服的控製頻率,降低了對於相機高幀率的依賴,從而(ér)提高了低幀率條件(jiàn)下伺服控製係統(tǒng)的精度和穩定性。
視覺(jiào)伺服控製係(xì)統整(zhěng)體架構由相機、圖像處理器、機器人控製器(qì)以及(jí)視覺伺服控(kòng)製器構成。
這一新的(de)視覺伺服控製方法隻需使用一般(bān)低幀率相(xiàng)機,即可實現與傳統高幀率相機相當的伺服性(xìng)能,從而降低了視覺伺服的(de)使用成本,為視覺伺服在更多工業場景中的(de)應(yīng)用鋪平了道路。
渡輪無人駕駛:
這些(xiē)航運黑科技不容(róng)小覷
在會場,ABB還展示了基於機器人、船舶電力推進係統和岸電技術的智(zhì)慧航運解決方案。
智慧航運解決方案加持
世界首次遠程(chéng)無人駕駛海上航行測試完成
2018年底,ABB與“芬蘭(lán)堡2號(hào)”冰級客渡輪(Suomenlinna II)開展合作,在芬(fēn)蘭(lán)首都港口完成了曆史性的世界首次遠程無人(rén)駕駛的海上航行測(cè)試。

這艘客渡輪配備了領先的ABB破冰級Azipods吊艙式全回轉(zhuǎn)電力(lì)推進(jìn)係統,並在2017年改(gǎi)造時加裝(zhuāng)了最新的動(dòng)態定位係統——ABB Ability船舶領航控製解決方案。
ABB Ability Tekomar XPERT船(chuán)舶發動機性能數字化解(jiě)決方(fāng)案通(tōng)過分析比對發動機實際運行數據和航測實驗數據,可為船舶航運客(kè)戶提供可操作的行動意見,提升發動機(jī)性能。
ABB Azipods 吊艙式全回轉係(xì)統支持船舶領航控製係(xì)統實現高能效靠泊,節省燃油高達20%,並(bìng)在世界範圍內(nèi)實現7*24小時遠程技(jì)術支持(chí)。
在遠程(chéng)領航海試(shì)中,渡輪從赫爾辛基(jī)的(de)集市廣場Kauppatori出發。船長在位(wèi)於赫爾(ěr)辛基的控製中心,利用ABB Ability船舶領航控製係統無線遙控這艘渡輪。在無人駕駛狀態下,渡輪成功地穿(chuān)越了赫(hè)爾辛基港附近的(de)測試區域,通過了遠(yuǎn)程海試(shì)。
這一開(kāi)創性海試標誌著船舶行(háng)業向逐漸接納無人駕(jià)駛係(xì)統邁出了關鍵性的一步。
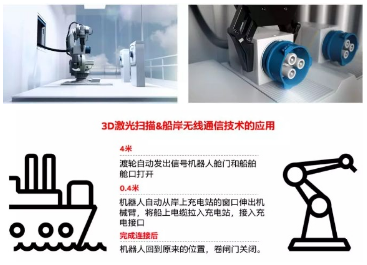
岸上充電站:減少排放(fàng),提(tí)高充電效率
為了更高效地讓(ràng)這(zhè)些(xiē)客輪保(bǎo)持能量滿滿、以最佳狀態服務航線(xiàn)乘客,自動化岸(àn)上充電技術成為不二(èr)選擇。ABB提供的(de)電力(lì)推進(jìn)設備和自動化岸上充電站,使得渡輪在減少排放的同時,大幅提高了充電效(xiào)率。
TOSA電動公交閃充係統:15秒(miǎo)快(kuài)速充電!
展台上,ABB還(hái)展示TOSA電動公交閃充係統,這一係統(tǒng)可為無接觸網(wǎng)、大載客量(liàng)和全電動的鉸接式公交車在(zài)部分車站實現15秒快(kuài)速充電。

大(dà)數據分析:
5萬隻蜜蜂帶來大量“甜蜜”數據
在ABB克拉科夫研究中心的屋頂,有(yǒu)一(yī)個5萬多(duō)隻蜜蜂的“甜蜜王國”。
蜜蜂的主人Dominik Lis既是研究中心的建築自動化專家,也是一位擁有20多個蜂巢、經驗(yàn)豐(fēng)富的(de)養蜂專家。他一直在努力擴(kuò)大ABB蜂群的規模,雖然這不是世界上最大的蜂群,但可以算(suàn)是世界(jiè)上被研究得最透徹的蜂群(qún)之一了。
這些蜜(mì)蜂不但釀出了蜂蜜,更(gèng)為研究人員創(chuàng)造(zào)了比蜂蜜更有價值的東西——大量的、寶貴的優質測試數據。

這(zhè)個研究中心的專業研(yán)究領域包括計算機算(suàn)法的開發,用來(lái)分析從(cóng)ABB不同類型傳感器中提取的大數據集。為了測試這(zhè)些算法,研(yán)究員們需要訪問大量不同類型的真實數據。
正如ABB克拉科夫研究中心(xīn)負責人Marek Florkowski所(suǒ)解釋的,科研過程中,研究人員(yuán)所麵臨的最大挑戰就(jiù)是優質樣本數據的獲取。在當今這個數字化社會中,數據就等同於價值。
“我們嚐試開發一些識別算法和分類算法的(de)模型並進行優化(huà),加速這些算法的實現。有一天大家突發靈感,為什麽不在屋頂上建個蜂巢呢?”
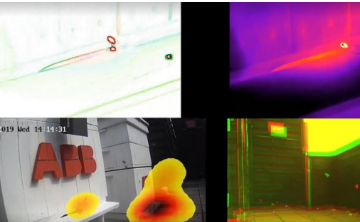
說幹就幹(gàn),科學家們對(duì)研究中心樓頂的蜂巢進(jìn)行了詳細的標定,現場多台攝像機對(duì)其進行實時監控,這個蜂巢裝滿(mǎn)了高科技的傳感器,用於(yú)測量重量、溫度、濕度、音頻等級等等,並將這些信息不間斷地被上(shàng)傳到服務器上,通過這些數據能夠追蹤蜜蜂的飛行路徑,繪製蜂群密度聚集圖。
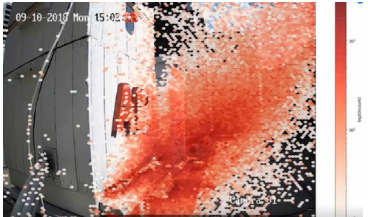

例如(rú),正對著蜂(fēng)巢入口的攝像機捕捉的圖像,能夠幫助開發圖像檢測係(xì)統和基於(yú)視頻傳輸的對象計數(shù)功能。當一大群蜜蜂同時飛出蜂巢時,科學家會嚐試找到一種方法來計算蜜蜂的數量,同時把速度、大小和背景等因素考慮在內,支持研究人員的實驗。
值得注意的是,來自蜂巢的這些技術和算(suàn)法正被運用(yòng)到(dào)當今數字社會最前沿的工(gōng)業環境中來。
對企業而言,價值不(bú)僅源自數據本身,更來(lái)自對數據的處理和(hé)解析,以及由此而來的算(suàn)法迭代。
這些創意十足(zú)的實驗醞釀出了許多新的(de)想法,提(tí)升了現階段的(de)技術水平,同時還帶來了甜(tián)蜜(mì)的副產品——“ABB牌”蜂蜜。
1.5億美元打造(zào)機器(qì)人“未(wèi)來工廠”
目前,ABB在中國擁有研發、製造、銷售和工(gōng)程服(fú)務等全方位的業(yè)務活動,40家本地企業,1.8萬(wàn)名員工遍布於142個城市,線上和線下渠道覆蓋全國300多個城市。
近日,ABB集團董事長(zhǎng)兼CEO傅賽(sài)表示:
“隨著中國擴大對外開放的步伐(fá),我們將繼續投資(zī)於數字化(huà)產業、電動汽車充電等充滿前景的市場領域。”

2018年10月,ABB宣(xuān)布在上海投資1.5億美元新(xīn)建一座機器人(rén)“未來工廠”,該工廠預計將於2020年底投入運營。新(xīn)工(gōng)廠將采用大量機器學習、數字(zì)化解決方案以(yǐ)及協作解決方案,打造為機器人行(háng)業最先(xiān)進、自動(dòng)化與柔性化程度最高的工廠,其研發中心(xīn)還將(jiāng)加速推動人工智能領域的(de)創新。
據悉,這一工廠(chǎng)將采用數字孿生技(jì)術,全麵聯接工業互聯網,並通過人工智能、機器學習及協作自動化大幅提升生產柔性與效能;同時,啟用(yòng)全新的機器人產品設(shè)計模式,利用可配置(zhì)的通用接口與構建模塊,無限擴展定製(zhì)解決方案,向全麵數字化的“未來工廠”邁(mài)進。
投稿箱:
如果您有機床行業、企業相關新聞稿件發(fā)表,或進行資(zī)訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發(fā)表,或進行資(zī)訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息
馬")
業界視點
| 更多

行業數據
| 更多
- 2024年11月 金屬切削機(jī)床產量數據
- 2024年11月 分地區金屬切削機床產(chǎn)量數據
- 2024年11月 軸(zhóu)承出(chū)口(kǒu)情況
- 2024年11月 基本型乘(chéng)用車(轎車)產量數據
- 2024年(nián)11月 新能源汽車產量數據
- 2024年(nián)11月 新能源汽車銷(xiāo)量情況
- 2024年10月 新能(néng)源汽車產量數據
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切削(xuē)機床(chuáng)產量數據
- 2024年10月 金屬切削(xuē)機(jī)床產量(liàng)數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能(néng)源汽車產量(liàng)數據
- 2028年8月 基(jī)本型乘(chéng)用車(轎車(chē))產量數據