床")



六維力傳感器在工業打磨和裝配(pèi)領域的應用
2019-7-23 來源:中國機器人網 作(zuò)者:-
機器人打磨市場
從國家政策方麵來看,核(hé)心傳(chuán)感器(qì)是作為工業4.0時(shí)代的一個很重要的基石,在《中(zhōng)國製造2025》、《“十三五”國家科(kē)技創新規劃》、《新一代人工智能(néng)發展規劃》等多(duō)個規(guī)劃裏麵,都(dōu)將傳感器的(de)研發作為規劃重點之一(yī)。有相關機構預測,到2025年我(wǒ)國工業互聯網(wǎng)市場規模將達到10.8萬億元,其中,傳感器作為數據采集的入口、工業互聯網的“心髒”,將迎來巨大(dà)的發展空間。
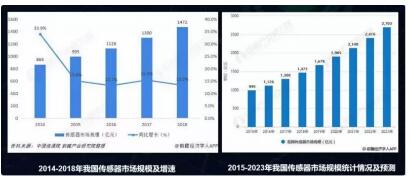
目前(qián),傳感器係統也正朝著著微小型化、智能化(huà)、多功(gōng)能(néng)化和網(wǎng)絡化的方向發展(zhǎn)。由中(zhōng)國(guó)信通院前瞻產(chǎn)業研究院整理的數據(jù)表明,2018年傳感器市場規模達1472億元,同比增長在10%以上(shàng),預計(jì)在2023年,我(wǒ)國傳感器市場規模將達2703億元。就打磨工藝來(lái)講(jiǎng),大致分為四種(zhǒng),即(jí)磨削加工、粗磨、 精磨、去毛刺(清除(chú)工件(jiàn)已加工部(bù)位周圍所形成的刺狀物或飛(fēi)邊)。
傳統打磨行業痛點
目前來看,傳統工業打磨行業普遍都有以下痛點:第一,危險(xiǎn)係數大,傳統的打磨由於產生的粉塵排出不及(jí)時,容易引發爆炸事故危及人身安全;第二,工件一致性差,打磨質量和工人的手法密切相關,工件品質不一;第三,生(shēng)產(chǎn)效率低,傳統人工打磨效率(lǜ)低,還存(cún)在廢品率高的問題;第四,人工成本高,招工留工難。
機器人打(dǎ)磨的優點
由此來看,機器人打磨是屬市場剛需,而機器人打磨也正能很好地解決這些問(wèn)題,與傳(chuán)統的(de)人工打磨相比,機器人打磨有以下優點:密(mì)閉式的機器人工作站,將高噪音和粉塵與外部隔離,減少環境汙染;操作工不直接(jiē)接觸危險的加工設備,避免工傷事故的發生;機器人能保證產品加工精度的一致性,不僅保證(zhèng)了質量的可靠,而(ér)且降低了廢品率;
機器人替代熟(shú)練工,不但(dàn)降低人力成本,而且(qiě)也不會因為操作工的流失而影(yǐng)響交貨期;機器人可以24小時連續作業,生(shēng)產效率大幅提高;用戶可更具不同樣件進行(háng)二次編程(chéng)開發,縮短產品改型換代周期(qī),減少相(xiàng)應的投資設(shè)備。

六維力傳感器是什麽?
我們今日的主題是《六維力傳感器在(zài)工業打磨(mó)和裝配領域(yù)的應用》,那麽什麽是六維力傳感器?
我們先來認識一下力覺傳感器,力(lì)覺傳感器是一類觸(chù)覺傳感器(qì),它在(zài)機器人和機電一體化設備中具有廣泛的應用。力和力矩(jǔ)傳感(gǎn)器是用來檢(jiǎn)測設備內(nèi)部力或與外界環境相互作用力(lì)為(wéi)目的,力不是直接可測(cè)量的物理量(liàng),力是通(tōng)過(guò)其他物理量間接測量(liàng)出的。
力傳感器可用作變換器,如應變元件,它可提供一個與變形、亦即(jí)作用於接觸點的力成正比的(de)信號。力覺傳感器可以檢測機器人有關部件(jiàn)(如手腕、手指)所受外力(lì)及轉矩,可以控製手腕移動,伺服控製,準確完成作業。

六維力傳(chuán)感器是力傳感(gǎn)器(qì)中一種新發展起來的傳感器,能同時轉換多維力/力(lì)矩信(xìn)號為電信號,可用於(yú)監(jiān)測方向和大小不(bú)斷變化的力與(yǔ)力矩和測量加(jiā)速度(dù)或慣性力以及檢測接觸力(lì)的大小和作(zuò)用點。
廣(guǎng)義六維力(lì)傳感器能(néng)夠檢查空間任(rèn)意力係中的三維正交(jiāo)力(fx、fy、fz)及三維正交力矩(mx、my、mz),由於(yú)其測力信息豐富、測量精度高等特點,主要應用在力及力-位控製場合,六維力/力矩傳感器為機(jī)器人控製提供力感信息(xī),是智能機器人重要的傳(chuán)感器(qì)。
六維力傳感器研究現狀
國際上(shàng)對(duì)多維力傳感器的研(yán)究是從20世紀70年代初開始的,主要研究單位有美國的DRAPER實驗室、 SRI (Stanford Research Institute,斯坦福研(yán)究所)、JPL實驗室、IBM公司和日本的日立公司、東京大學等單位。
國(guó)內對六維力傳感器的研究是在上世紀80年代初期開始的,中科院合肥智能機械研究(jiū)所於1987 年研製出我國第一台六維腕力傳感(gǎn)器,之後陸續有哈爾濱工業大學、華中(zhōng)理工大學、東南(nán)大學(xué)等單位研製出(chū)多種(zhǒng)規格的多維(wéi)力/力矩傳感器,展現了我國(guó)多維力/力矩信(xìn)息獲取研究(jiū)領域的蓬勃發展態(tài)勢。目前(qián)在六維力傳感器研(yán)究較多(duō)的院校有燕(yàn)山大學、哈工大,大連理工等(děng)。

近年,研究熱點更多的關注在多維(wéi)力(lì)/力矩傳感器的應用領域,如現代工業機器人怎麽樣充分利用(yòng)多維力/力矩傳感器以及其它感(gǎn)知係統來完成各種環境下更多更(gèng)複(fù)雜的機器人作業,使工作更加精確、生(shēng)產效率更高、成本更低;如將多維力/力矩傳感器利用到工業機器(qì)人自動裝配生產線,結合(hé)更實時更有效的算法(fǎ),使智能工業機器(qì)人能夠(gòu)更好的進行精密柔性機械裝配、輪廓跟蹤等作業。
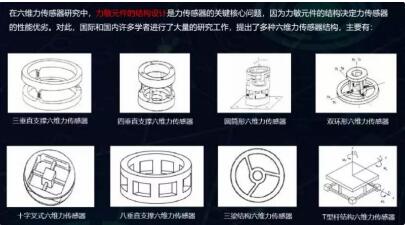
在六維力傳感器研究中,力(lì)敏元件的(de)結構設計是力傳感器的關(guān)鍵核(hé)心問題,因為力敏元件的結構決定力傳感器的性能優(yōu)劣。對此,國際和國內許多(duō)學者進行了大量的研究工作,提出了多種六維力傳感器結構,如下圖(tú)展示:
工業打磨中的六維力傳(chuán)感器
六維(wéi)力傳(chuán)感器在工業級的主要運用領域是裝配和打磨,打磨是機器人運用很廣泛(fàn)的一個領域,就目前的市場情況來(lái)看,對於打磨精度要求較高的行業主要是3C行業,而且(qiě)3C行業(yè)勞動密集度高,迫切需要實現自動化改造。再加上3C行業的柔性化需求,需要更高智能(néng)的打磨(mó)機器人才能(néng)更好的滿足市場需求。
六維力傳感器通過傳感器固定座與機械臂(bì)的末端關節固(gù)定連接。靜態條件(jiàn)下,機械(xiè)手腕部六維(wéi)力傳感器測得的力和力矩數據由三部分組(zǔ)成,即傳感器(qì)自身係統誤差、負載重力作用(yòng)、負載所受外部接觸力。在加工、裝配等工業機器人應用中,機器人末端工具或工件與外界環境的接觸力需要被精確的感知,控製係統據此修改機器人的運動,才能保證作業的柔順性。

傳感器的市(shì)場挑戰(zhàn)
雖然六維力傳感器在機器人自由度上(shàng)可以達到六個維度的自由度,大(dà)大提(tí)升機器人的智能水平(píng),但是目前工業領域市場上的使用情況並不是很樂觀,特別是國內市場用到六維力傳感器的打磨(mó)機器人產(chǎn)品並(bìng)不是很多。
目前用到浮動主軸的(de)方(fāng)式比較多(duō),單維力控。原因主要有兩個方麵:1、在對精密打磨要求不高的行業,目前的力傳感(gǎn)器就能滿足打磨工序的需要,企業不願意花更大的代價去購買配置了(le)六維力傳感器的打磨設備;2、目前六維力傳感器的價格相對昂貴,更新改造成本較高(gāo)。
傳感器的市(shì)場(chǎng)機遇
隨著(zhe)工業加工、製造業的發展越來(lái)越(yuè)精細化,精密裝配行業如3C行業對生產機(jī)器人的要求也會提高(gāo),具備更高性能的傳感器如六維(wéi)力傳感器也將迎來(lái)新(xīn)的發展(zhǎn)機遇。目前超過 90%的工業自動化作業是傳統(tǒng)機器人無法完成(chéng)的,包括精密打磨、精密裝配、機械管理、備料、裝貨卸貨、包裝等還未實現完全自動化。人(rén)機協作機器人可以部分彌(mí)補傳統工業機器人的不足,完成機械管理等工作。2015年全球(qiú)機器人行業及相關服務市場規模為710億元,預計 2019 年可達 320 億美元。六維力傳感器作為人機協作機器人的重要部(bù)件(jiàn),在人機協作應用中發揮著至關重要的作用。

隨著5G時代的到來,工業製造領域迎來一(yī)場全新的變革,這輪革新源於新一代信息技術的突破發展,以及市場需求變化和(hé)政策的大力推動。因此,製造業(yè)必須要進行轉(zhuǎn)型升級(jí),通(tōng)過融合新的技術將製造水平提升到一個新的高度。
在(zài)大數據和物聯網(wǎng)的強(qiáng)大支撐下,工(gōng)業加工、製造業生(shēng)產的整個產業鏈會越來(lái)越精細化,“柔性”將是未來工業加工和製造業生產的核心競爭力。
投稿箱(xiāng):
如果您有機床行業、企業(yè)相關新聞稿(gǎo)件發表,或進行資訊合作,歡迎(yíng)聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業(yè)相關新聞稿(gǎo)件發表,或進行資訊合作,歡迎(yíng)聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更(gèng)多相關信(xìn)息

業界視點
| 更(gèng)多

行業數據(jù)
| 更(gèng)多
- 2024年11月 金屬切削機床(chuáng)產量數據(jù)
- 2024年11月 分地區金屬切削(xuē)機床產量數據
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能(néng)源(yuán)汽車產量(liàng)數據
- 2024年10月 軸承出口情況
- 2024年10月 分地(dì)區金屬切削機床產(chǎn)量數(shù)據
- 2024年10月(yuè) 金屬切削機(jī)床產量數(shù)據
- 2024年(nián)9月 新能源汽車(chē)銷量情況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本型(xíng)乘用車(轎車)產量(liàng)數據
博文選萃
| 更多
- 機械加(jiā)工過程圖示
- 判斷一台加工中心精(jīng)度的幾種辦法
- 中走絲線切(qiē)割機床的(de)發展趨勢
- 國產(chǎn)數控係統和數控機床何去何從(cóng)?
- 中(zhōng)國的技術工人都去哪裏了?
- 機械(xiè)老板做(zuò)了十多年,為何還是小作坊?
- 機械(xiè)行業最新自殺性營銷,害人害己!不倒閉才
- 製造業大逃亡
- 智能時代(dài),少談點智造,多談點製造(zào)
- 現實麵前,國人沉默(mò)。製造業的騰(téng)飛,要從機床
- 一文搞懂(dǒng)數控車床加工刀具補償功能
- 車床鑽孔攻螺(luó)紋加(jiā)工方法及工裝設計
- 傳統鑽削與螺旋銑(xǐ)孔加工工藝的區別