



基於 Sim Mechanics 的六自由度機械臂仿真研究
2017-7-31 來源:廣東工業(yè)大學機電工程(chéng)學院,廣(guǎng)東(dōng)廣州 作者:康(kāng)信勇,趙(zhào)翼翔,陳新
摘(zhāi)要: 運動(dòng)學和動力學分(fèn)析(xī)對機械臂的研究具有很重要(yào)的作用。以往對機械臂的研究(jiū)方法均需要建立複雜的數學模型和程序,而 Sim Mechanics 具有簡單、快捷獲取動態係統(tǒng)的模型的功能,並且係統建模方便直觀,仿真(zhēn)功能強大,可以在模型中通過改變結構,優化係統參數,在(zài)仿真環境中分析結果。利用 Sim Mechanics 的上述優點,以工業六自由度機(jī)械臂 ER10為研究對象,將 Solid Works 建立好的機械臂 ER10 模型導入到(dào) MATLAB/Sim Mechanics 仿真平台中,生(shēng)成對應的仿真模型,並(bìng)且在運動仿真平台中,通過在機械臂(bì)模型添加(jiā)末端位姿信號和各個關節信號 ( 角度函數,力矩值(zhí)) ,全麵地對機(jī)械臂進行運動學(xué)和動力學分析。
關鍵詞: 機(jī)械臂; MATLAB/Sim Mechanics ; 運動仿真
前言
隨著工業機械臂(bì)的發展,工(gōng)業機械臂越來越廣泛地被運用於工業各個領域。而機械臂本身是一個複雜(zá)的機電係統(tǒng),設計(jì)出來的機械臂的機電(diàn)係統(tǒng),需要包含驅(qū)動力 /力矩和驅動器(qì)。在設(shè)計(jì)機械(xiè)臂控製係統(tǒng)時,我們需要獲得每個部分的數學模型,每個電機的所需要(yào)扭矩和旋(xuán)轉角度,並預計機械臂的運動位置。現以六自由度工業機(jī)械臂 ER10 為(wéi)研究對象(xiàng),基於 MAT-LAB / Sim Mechanics 仿真平台進行仿真研究。ER10 機械臂(bì)末端負載為 10 kg,可以應用於噴釉,拋(pāo)光(guāng)打磨等行業。Sim Mechanics 仿真平台最大的特點是: 不需要去建立機構運動的數學模型和編製複雜程序; 係統建模方便直觀,仿真功能(néng)強大; 可(kě)以通過改變結構,優化係統參數(shù),在仿真軟件(jiàn)環境中分析(xī)結果。這些特(tè)點大大減輕建立機構運(yùn)動仿真模型這一過程(chéng)的(de)工作量,研究機械臂時可以通過這種簡單、快捷的方法來獲取(qǔ)機械臂的動態係統的(de)模(mó)型(xíng)。Sim Mechanics 包含一(yī)個模(mó)塊庫和特殊的仿(fǎng)真接口 ( 傳感(gǎn)器和驅動塊) ,這些模塊將 Sim Mechanics 模 塊 和 Simulink 環境相銜接
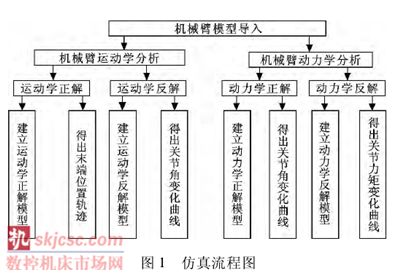
文中將六自由(yóu)度機械臂三維模型導入至 Sim Me-chanics 仿真平台中,生(shēng)成對應的仿真模型,並在仿真模型的關節上添加關節角度信號,進行機械臂(bì)運動學正解分析; 添加末端位姿信號,進行機械臂(bì)運動學反解分析; 添加關節力矩和末端位姿信號(hào),進行機械臂動力學正解分析; 添(tiān)加關節角度信號,進行機 械 臂 動 力 學 反 解 分 析。仿 真 流 程 圖 如 圖 1所示
1 、Sim Mechanics 建模技術(shù)
Sim Mechanics 可以仿真機構的運動,並提供了一係列工具求解帶有靜力學約束、坐標係變換等在內的機構係統的運動問題,可以利用虛(xū)擬現實工具箱提供的功能顯示機 構係(xì)統運 動的動畫 示 意圖。可以在Sim Mechanics 的機構模型中通過特殊的 Sensor 模塊和Actuator 模塊與一般的 Simulink 模塊(kuài)相連接,利用牛(niú)頓動力學基本(běn)概念,對(duì)各種運動副連接的剛體進行建模與仿(fǎng)真,實現對機構係統進行分與析設計的目(mù)的。
下麵簡單介紹 Sim Mechanics 包含的並將用到的模塊,如表 1。表 1 Sim Mechanics 模(mó)塊
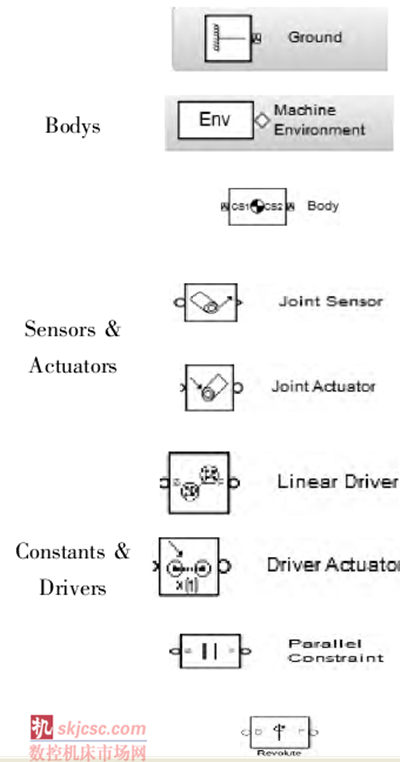
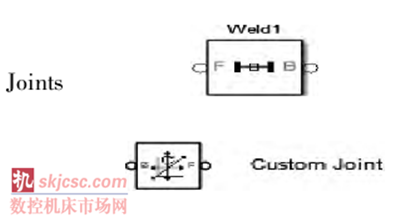
表 1 Sim Mechanics 模塊
Ground 模塊(kuài)表示在慣性坐標係中一個(gè)相對地麵靜止的點,一端連接到關節上以阻止關節一側(cè)的移動。每個有效的 Sim Mechanics 機構至少含有一(yī)個 Ground 模(mó)塊。
Machine Environment 模塊是用於查看和修改機械模型的(de)環境變量設置。 每個Ground 模塊必(bì)須連接一個有效的機械環境模塊。
Body 模塊代表一個用戶定義的剛體屬性。用戶指定的屬性必(bì)須(xū)包括(kuò): 物體(tǐ)的質量和慣性矩(jǔ)張量(liàng)。物體的重(chóng)心坐標( CG) 一個或多個物體坐標係統 ( CSs) 。
Joint Sensor 模塊表示(shì)測量關(guān)節模塊原始的位置、速度和加速度; 也可以測量關(guān)節模塊的接觸(chù)力和力矩。
Joint Actuator 模塊表示(shì)一個或(huò)者多個信號驅(qū)動物體之間的關節,這些信(xìn)號可以為力信號和運動信號 ( 包括角度,角速度和角加速度) 。
Constants &DriversLinear Driver 模塊驅動塊指定組件的不同身體坐標係統 ( CS) 起(qǐ)源作為時間的函(hán)數(shù)。
Driver Actuator 模塊為驅動聯(lián)係兩物(wù)體之間的驅動塊。驅動塊(kuài)需(xū)要一個時間函數來指定相對(duì)位置、速度和加速度。兩個平行約束機構連接的限(xiàn)製他們的(de)相對轉動運(yùn)動。確保兩個物(wù)體(tǐ)的軸向量是平行(háng)的。
JointsRevolute 模塊表示物體之(zhī)間的旋轉關節。
Weld 模塊表示兩個物體之間沒有自由度的關節,兩端物體連接在一起沒有相對移動(dòng)。
Custom Joint 模塊表示自定義關節 ( 含移動、轉動或球形) 代表最一般和不受約束的自由度在三維(wéi)空間(jiān)中,可以表示三個平移自由(yóu)度和(hé)三個旋轉自(zì)由度,也可以作為一個球形關(guān)節表示作為一個,兩個或三個(gè)轉動轉動自由度由右手法則定義(yì)。
2 、機械臂(bì)模型導(dǎo)入
將 Solid Works 建 立 的 機 械 臂 模 型 利 用 Sim-Mechainics 插件導入到 MATLAB 中,得到機械臂本體的仿真模型,如(rú)圖 2 所示。

圖 2 機械臂仿(fǎng)真模型
仿真運行時的運動可視化(huà)模型如圖 3 所示。
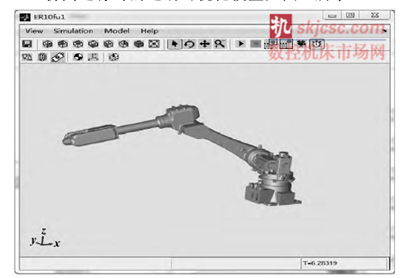
圖 3 機械(xiè)臂可(kě)視(shì)化模(mó)型
3 、六自由度機械臂運動學分析
3. 1 機械臂運動學正解關節角度驅動信號(hào)如圖 4 所示。
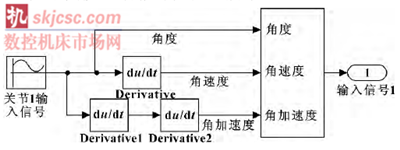
圖 4 關節角度驅動信號
機械臂運動(dòng)學正解是(shì)根據各個關節變量 θ1,θ2,θ3,θ4,θ5,θ6的值,來求解機械臂末端(duān)位姿。按照這(zhè)個要求(qiú),為了方便分(fèn)析運動學正解,取各個關節角度變化值。關節 1 角(jiǎo)度變化函數為 θ1= 35sint; 關節 2角(jiǎo)度變化函數(shù)
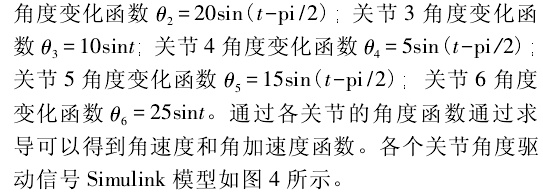
六自由度機(jī)械臂添加關節角度驅動信號後模型如圖 5 所示。
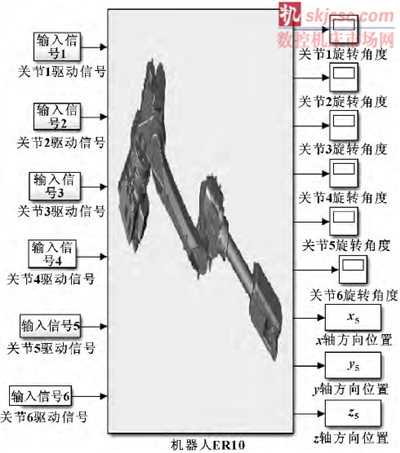
圖 5 運動學正解模型
ER10 子係統(tǒng)模型如圖 6 所示。
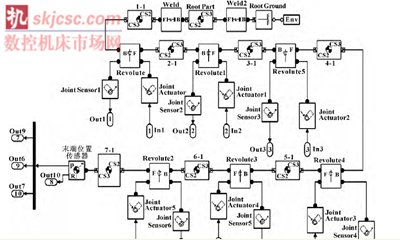

圖 6 ER10 子係統模型
各個關節角度(dù)函數的變化曲線圖如圖 7 所示。
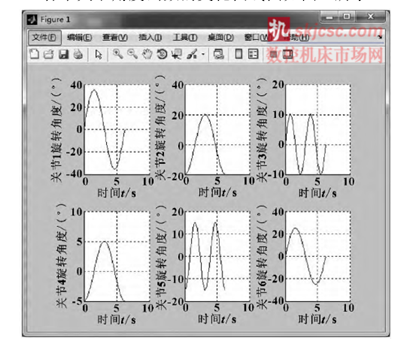
圖 7 關(guān)節角度變化
實(shí)際末端軌跡如(rú)圖 8 所示。
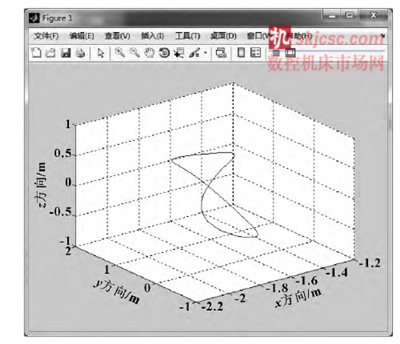
圖 8 末端軌跡圖
這樣通過(guò)直接在關節上添加關節角度函數來觀察(chá)機械臂末端軌跡變化,直觀地(dì)觀察機械臂運動學正解仿真時的變化(huà)情況。
3. 2 六自由度機械臂運動學反解(jiě)
機械臂運動學反解是通過機械臂末端位置,求各個關節(jiē)角度變(biàn)化。為了分析機械臂反向運動,定義機械臂末端位置軌跡為:x = 0. 2sin t+π2( )-2; y = 0. 2sint-1; z = 0. 04
利用 Sim Mechanics 建立運動學反解模型如圖 9 所示。
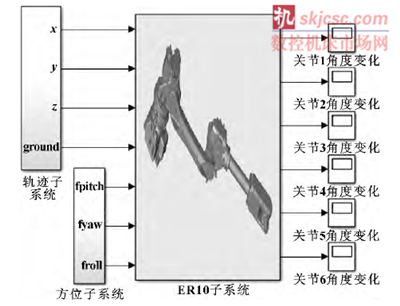
圖 9 運動學反解模型
端軌跡子係統模型如圖 10 所示。
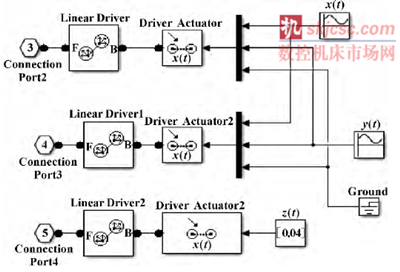
圖 10 末端軌跡模型
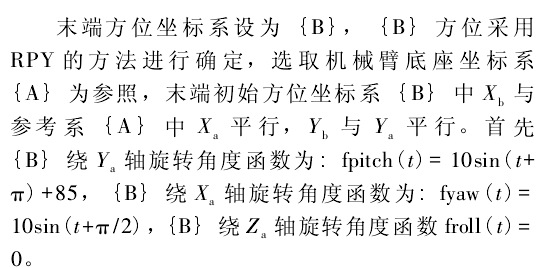
方位(wèi)子係統 Sim Mechanics 模型如圖 11 所(suǒ)示(shì)。
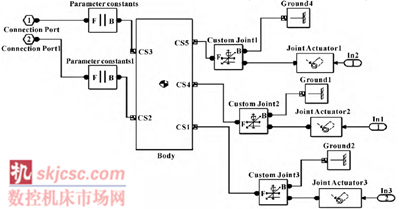
圖 11 末端方位模型圖
理 想 情 況(kuàng) 下 末 端 軌 跡 繪 製 三 維 圖 形(xíng) 如 圖(tú) 12所示。
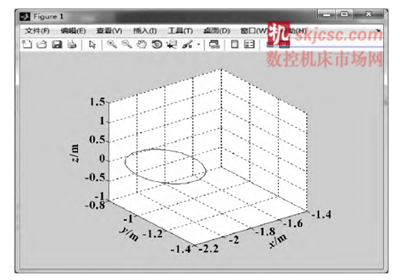
圖 12 末端軌跡
仿真後各關節角度變化曲線如圖 13 所(suǒ)示。
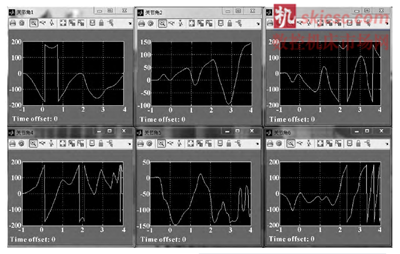
圖(tú) 13 各關節角度變(biàn)化曲(qǔ)線
求得關節角(jiǎo)度變化可為機 械臂控製係統(tǒng)中進一步設 計 電 機 的 旋(xuán) 轉 角 度 變 化 提 供 一 定 的 理 論依據。
4 、六自由度機械臂動力學分析
4. 1 機械臂動(dòng)力學正(zhèng)解
根據 關 節 驅 動 力 或 力 矩,計 算 機 械 臂 的 運 動( 關節位移、速度和加(jiā)速度) 。現在在前 3 個旋轉關節上添加驅動力矩 M = 10 N/m,後 3 個旋轉關節上添加驅(qū)動力矩 M = 3 N/m。動力學(xué)正解(jiě)模型中末端軌跡和方位的設定與機械臂運動學反解中的末端軌跡和方(fāng)位的設定一致。
以此創建出來(lái)的機械臂動(dòng)力學正解 Sim Mechanics模型如圖 14 所示。
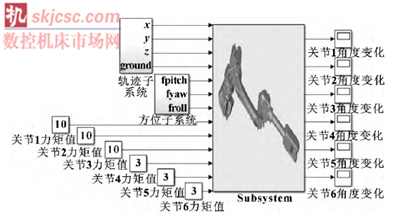
圖 14 機器人動力學正(zhèng)解(jiě)
機械臂運動仿真後各關(guān)節(jiē)角度(dù)變化曲線如圖 15所示。
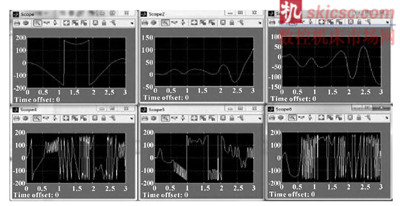
圖 15 角(jiǎo)度變化曲線
從圖中看出在各個關節上施加旋轉力矩的(de)情(qíng)況下隨著末端位置軌跡的變化,機械臂各個關節角也在不斷變化,反應(yīng)出在添加關節力矩(jǔ)後,關(guān)節角的變化(huà)情況。
4. 2 機械臂動力學反(fǎn)解(jiě)
根據軌跡運動的對應的關節位移、速度和加速度、求所需要(yào)的關節(jiē)力矩或力。現在在各個關節上添加角位 移變化函數(shù),關 節 1 角 度 變(biàn) 化 函 數 為 θ1=35sint; 關節 2 角度變化函(hán)數 θ2= 20sin ( t - pi / 2) ; 關節 3 角度變化函數 θ3= 10sint; 關節 4 角度變(biàn)化函數θ4= 5sin( t-pi / 2) ; 關節 5 角度(dù)變化函數 θ5= 15sin( t -pi / 2) ; 關節 6 角度變化函(hán)數 θ6= 25sint。 各關節的角度函數通(tōng)過求導(dǎo)可以得到(dào)角速度和角加速度函數。各個 關 節 角 度 驅 動 信 Simulink 模 型 如 圖 4所示。
添加(jiā)驅動信號和輸(shū)出模(mó)塊後,六自由度機械臂Sim Mechanics 動力學反解模型如圖 16 所示。
對 Sim Mechanics 模塊中的 Joint Sensor 模塊設置如圖 17 所(suǒ)示(shì),選(xuǎn)擇輸出為關節矩。
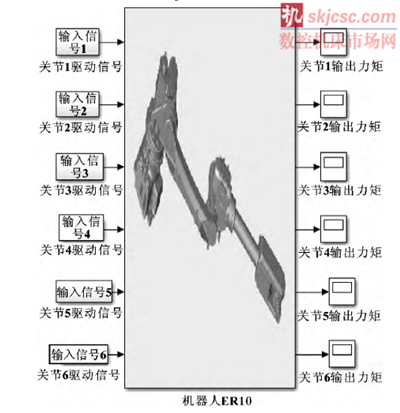
圖 16 機械臂動力學反解
θ4= 5sin( t-pi / 2) ; 關(guān)節 5 角度變化函數 θ5= 15sin( t -pi / 2) ; 關節 6 角度變化函數(shù) θ6= 25sint。 各關節的角度函數通過求導可(kě)以得到角速度和角加速(sù)度(dù)函數各個 關 節 角(jiǎo) 度 驅 動 信 號 Simulink 模 型 如 圖 4所示。
添加驅(qū)動信號和輸出模塊後,六(liù)自由度機械臂Sim Mechanics 動力學反解模型如圖 16 所示。
對 Sim Mechanics 模塊中的(de) Joint Sensor 模塊設置如圖 17 所示,選擇輸出為關節矩。

圖 17 模塊設置
仿真運行後各旋轉關節力(lì)矩的變化情況如圖 18 所示(shì)。
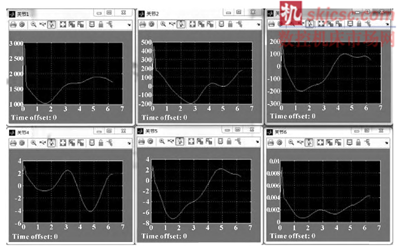
圖 18 關節力矩變化
在實際操作(zuò)過程中可以通過機械臂的動力學反解的變化情況,來分(fèn) 析關節角的變化對關節力 矩的影響。
5 、結束語
研究和分析了六自由度機械(xiè)臂運動學和動力學仿真。機械臂相(xiàng)關控製的(de)研究設計都是在運動學和(hé)動力學基礎上進行,利用 MATLAB /Sim Mechanics 仿真平台分析機器人運動學和動力學,大大減輕建立機構仿真模型這一過程的工作量,並且(qiě)分析出機械臂運動學正反解中(zhōng)各個關節的角度變化和位姿變化情況,以及動(dòng)力學正反解中角(jiǎo)度變化和力矩等相關數值相互影響後的變化情況,為進一步設計(jì)機械臂的控製做準備。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表(biǎo),或進行資(zī)訊合作,歡(huān)迎聯係本網編輯部, 郵(yóu)箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表(biǎo),或進行資(zī)訊合作,歡(huān)迎聯係本網編輯部, 郵(yóu)箱:skjcsc@vip.sina.com
更多(duō)相關信息
馬")
業界(jiè)視點
| 更多

行業數據
| 更多
- 2024年11月 金屬切削機床(chuáng)產(chǎn)量數據
- 2024年11月 分地區金屬切削機床產量數據
- 2024年11月(yuè) 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新能源汽(qì)車產量(liàng)數據
- 2024年11月 新(xīn)能(néng)源汽(qì)車銷量情況
- 2024年10月 新能源汽車產量數據
- 2024年(nián)10月 軸承出口情況
- 2024年10月 分地區金屬切削機床產(chǎn)量(liàng)數據
- 2024年10月 金屬切削機床產量數據
- 2024年9月(yuè) 新(xīn)能源(yuán)汽(qì)車銷量情況
- 2024年8月(yuè) 新能源汽車產量數據
- 2028年8月 基本型乘用車(轎車)產(chǎn)量數(shù)據