



若說(shuō)當下的熱門科技,機器人絕對算一個(gè)。機器人作為典型的機電一體化技術密集型產品,它是如何實現運作的呢?
機器人的控製分為機械本體控製和伺服機構控製兩大類,伺服控製係統則是(shì)實現機器人機(jī)械本體控製和伺服機構(gòu)控製的重要部分。因而要了(le)解機器人(rén)的運(yùn)作過程,必然繞不過伺服(fú)係統。

伺服係統
伺服係統是以(yǐ)變頻技術(shù)為基礎發展起來的產品,是一(yī)種(zhǒng)以機械(xiè)位置或角度作為控製對象的(de)自動控製係(xì)統。伺服係統除了可以進行速度與轉矩控製外,還可以(yǐ)進(jìn)行(háng)精確、快速(sù)、穩定的位置(zhì)控製。
廣義的伺服係統是精確地跟(gēn)蹤或複現某個給(gěi)定過程的控製係統,也可稱作隨動(dòng)係統。
狹義(yì)伺服係(xì)統又稱位置(zhì)隨動係統,其被控(kòng)製量(輸出量)是負載機械空間位置的線位移或角位移,當位置給定量(輸入量)作任意變化時,係統的主要(yào)任務是使輸出量快速(sù)而準確(què)地複現給定量的變化。
伺服係統的結構組成(chéng)
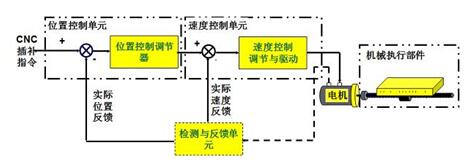
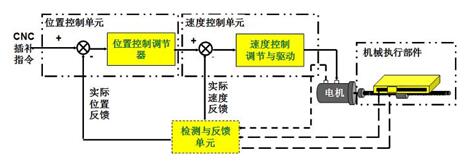
機電一體化的伺服控製係統的結構、類型繁多,但從自動控製理論的(de)角度來分析,伺服控(kòng)製係統(tǒng)一般包括控製器、被控對象、執行環節、檢測環節、比較(jiào)環節等五部分。
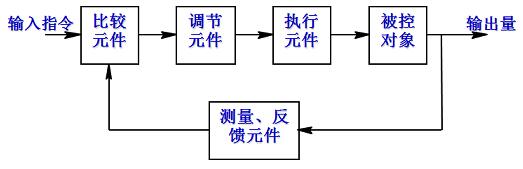
伺服係統組成原理框圖
1、比較環節(jiē)
比較環節是將(jiāng)輸入的指令信號與係統(tǒng)的反饋信號進行比較,以獲(huò)得輸出與輸入間的(de)偏差(chà)信號的環節,通常由專門的(de)電路或計算機來實現。
2、控製器
控製器(qì)通常是計算(suàn)機或PID(比例、積分和微分(fèn))控製電路,其主(zhǔ)要任務是對比較元件輸出的偏差信號進行變換處理,以控製執行元件按(àn)要求(qiú)動作。
3、執行環(huán)節
執行環節的作用是按(àn)控製(zhì)信號的要(yào)求,將輸入的各種形(xíng)式的能量轉化成機械能,驅動(dòng)被控對象工作。機電一體化係統中的執行元件一般指各種電機或液壓、氣動伺服機構等。
4、被(bèi)控(kòng)對象
被控對象指被控製的物件,例如一(yī)個機械手 臂,或是一個機械工作平台。
5、檢測環節
檢測環節是指能夠對輸(shū)出(chū)進行測量並轉換成比(bǐ)較環節所需要的量綱的裝置,一般包括傳感器和轉換(huàn)電路。
伺服(fú)係統的特點和功用
伺服係統與一般機床(chuáng)的進(jìn)給係統(tǒng)有本質上差別,它能根據指令(lìng)信號精確地控製執(zhí)行部(bù)件的運動速度與位置。伺服係統是(shì)數控裝置和機床的聯係環節,是(shì)數控係統的重要(yào)組成,具有以下特點(diǎn):
必須具備高精度的傳感器,能準確(què)地給出輸出量的電信號。
功率(lǜ)放(fàng)大器以及控製係統都必須是可逆的。
足夠大的調速範圍及足(zú)夠強(qiáng)的低速帶載性能。
快速的響應能力和較強的抗幹擾能力。
伺服係統(tǒng)的類型
按控製(zhì)原理分:有開環、閉環和半閉環三種形式
按被控製量性質分: 有(yǒu)位移、速度、力和力矩等伺服係統形式(shì)
按驅動方式分(fèn): 有電氣、液壓和氣壓(yā)等伺服驅動形式
按執行元件分(fèn): 有步(bù)進電機伺服(fú)、直流電機(jī)伺服和交流電(diàn)機伺服形式
伺服係統的執行元件
1、執行元件的種類及其特點
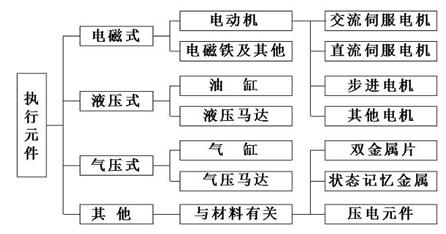
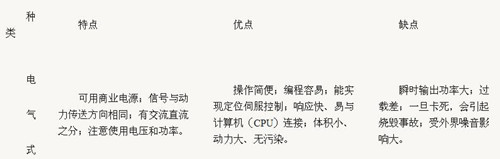
(1)電氣式執行元件
電氣執行元件包括直流(DC)伺服電機、交流(AC)伺服電機、步進電機以及電磁鐵等,是最常用的執行(háng)元件。對伺服電機除了要求運轉平穩(wěn)以外,一(yī)般還要(yào)求動態性能好,適合於頻繁使(shǐ)用,便於維修等。
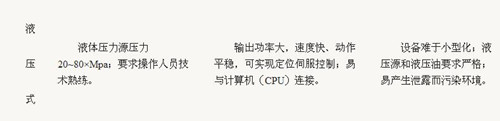
(2)液壓式執行元件
液壓(yā)式執行元件主要包括往複運(yùn)動油缸、回轉(zhuǎn)油缸、液壓馬達等,其(qí)中(zhōng)油(yóu)缸最(zuì)為常見。在同等輸出功率的情況下,液壓元件具有重量輕、快速性好等特點。
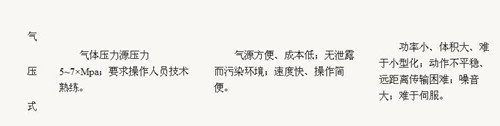
(3)氣(qì)壓式執行元件
氣壓式執行元件除了用壓縮空氣(qì)作工作介質外,與液壓式執行元件沒有區別。氣壓驅(qū)動雖可得到較(jiào)大(dà)的驅動力、行程和速度,但由於空(kōng)氣粘性差,具有可壓縮性,故不能在定位精度要求(qiú)較高的場合使用。
三種類型(xíng)的區別
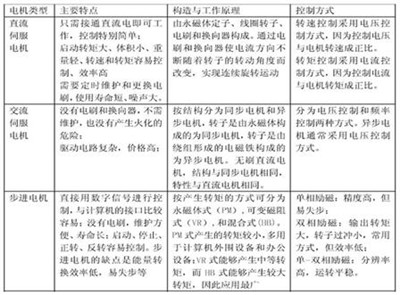
2、常(cháng)用的控製用電機
控製用電機是電氣(qì)伺服(fú)控製係統(tǒng)的動(dòng)力部件。它是將電能轉換(huàn)為機械能的一種能量轉換裝置。機電一體化產品中常用的控製用電(diàn)機是指能提供正確運動或較複雜動作的伺服電機。
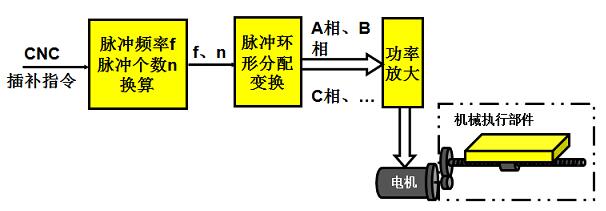
控製用電機有回轉(zhuǎn)和直線驅動電機,通過電壓、電流、頻率(包括指令脈衝(chōng))等控製,實現(xiàn)定速、變速驅動或反複啟動(dòng)、停止的增量驅動(dòng)以及(jí)複雜的驅(qū)動,而(ér)驅動精度隨驅動對象的不同而不同。
(1)伺服(fú)驅動電機一般是指:步進電機(Stepping Motor)、直流伺服電機(DC Servo Motor)、交(jiāo)流伺服電機(AC Servo Motor)
(2)常用伺服控製電動機的控製方式主要有:開環控製、半閉環控製、閉環(huán)控製三種。
閉環係統的驅動係統具有位置(或速度)反饋環節;開環係統沒有位置與速度反饋環節。
a、開環數控係統
沒有位置測(cè)量裝置(zhì),信號流是單向的(數控裝置→進給係統(tǒng)),故係統穩定性好。
無(wú)位置(zhì)反饋,精度相(xiàng)對閉環係統來講不(bú)高,其精度(dù)主要取決於伺服驅動(dòng)係統和機械(xiè)傳(chuán)動機構的性能和精度。一般以功率步進電機(jī)作為伺服驅動元件(jiàn)。
這類係統具(jù)有結構簡單、工作穩定、調試(shì)方便、維修簡(jiǎn)單、價格低廉等優點,在精度和速度要求不高、驅動力(lì)矩不大的(de)場合(hé)得到(dào)廣泛應用。一般用於經濟型數控機床。
b、半閉環數(shù)控係統
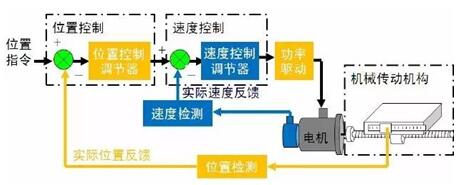
半閉環數控係統(tǒng)的位置采樣點如圖所示,是從驅動裝置(zhì)(常用伺服電機)或絲杠(gàng)引出,采樣旋轉角度進行檢測,不(bú)是直接檢測運動部件的實際位置。
半閉環環路內(nèi)不包括或隻包括少(shǎo)量機(jī)械傳動(dòng)環節,因此可(kě)獲得穩定的(de)控製性能,其係統的穩定性雖(suī)不如(rú)開環係統,但比閉環要好。由於絲杠的螺距誤差和齒輪間隙引起的運動誤差難以消除。因此,其精度較閉環差,較開環好。但可對這類誤差進行補償,因而仍可(kě)獲得滿意的精度。
半閉(bì)環數控係統結構簡單、調試方便、精度也較高,因而在現代CNC機床(chuáng)中得到(dào)了廣泛(fàn)應用。
c、全閉環數控係統
全閉環數控係統的位置采樣點如圖的虛線(xiàn)所示,直接對運動部件的實際位置進行檢測。
從理論上講,可以消除整(zhěng)個驅動和傳動環節的(de)誤差、間隙和失動量。具有很高的位置控製精度。由於位置環內的許多機械傳動環節的摩擦特(tè)性、剛性和間隙都(dōu)是非線性的,故很容(róng)易造(zào)成係統的不穩定,使閉環係統的設計、安裝和調試都相當困難。
該係(xì)統主要用於精度要求很高的鏜銑(xǐ)床、超(chāo)精車床、超精(jīng)磨床以(yǐ)及較大型的數控(kòng)機床等。
機器人的伺服係(xì)統
通(tōng)常情況下,我們所說的機器人伺服係統是指應(yīng)用於多軸運動控製(zhì)的精密伺服係統。一個多軸運動控製係(xì)統是由高階運動控製器與低階伺服驅動器所組成,運動控製器負責運動控製命令譯(yì)碼、各個位(wèi)置控製軸彼此間的相對運動、加減速輪廓控製等等,其主要作用在於降低(dī)整體係(xì)統運動(dòng)控製的路徑誤差;伺服驅動器負責(zé)伺服電機的(de)位置控製,其主要作用在於(yú)降低伺服軸的追隨誤差(chà)。
機器(qì)人的伺服係(xì)統由伺服電機、伺服驅動(dòng)器、指令機構三大部分構成,伺服電機是執行機構,就是靠它來實現運動的,伺服(fú)驅動器(qì)是伺服電機的功率電源,指令(lìng)機構是發脈衝或者給(gěi)速度用於(yú)配(pèi)合伺服(fú)驅動(dòng)器正常(cháng)工作的。
機器人對伺服電(diàn)機(jī)的要求比其它兩個(gè)部分都高(gāo)。首先要求伺服電機具有快速響應性。電機從獲得指令信號到完成指令(lìng)所要求的(de)工作狀態的時間應(yīng)短。響應(yīng)指令信號的時間愈短,電伺服係統的靈(líng)敏性愈高,快速響應(yīng)性能愈好,一般是以伺服電機的機電時間常數的大小來說(shuō)明伺服電機快速響應的性能。其次,伺服電機的起動轉(zhuǎn)矩慣量比要大。在(zài)驅動負載的情況下(xià),要求機器人的伺服電機的起動轉矩大,轉動慣(guàn)量小。最後,伺服電機要具有控製特性的(de)連續性和直線性,隨著控製信號的變化,電機的轉速能連續變化,有時還需轉速與控製信號(hào)成正比或近似成正比。
當然,為了配合機器人的體(tǐ)形,伺服電機必須體積小、質量小、軸向尺寸短。還要(yào)經受得起苛刻的運(yùn)行條件,可進行十分頻繁的正反向和加減速運行,並(bìng)能在短時間內承受數倍過載。
伺服驅動器是可利用各(gè)種電機產生的(de)力矩和力,直接或間接地驅動機器人本體以獲得機器人的各種運動的執行機構,具有(yǒu)轉矩(jǔ)轉動慣量比高(gāo)、無(wú)電刷及換向(xiàng)火花等優點,在機器人中應用比較廣泛。
伺服係統的發展趨勢
隨著(zhe)伺服係統的應用越來越廣,用戶對伺服驅動技術的要求也越來越高。總的來說,伺服係(xì)統的發展趨勢可以概括為以下幾個方麵:
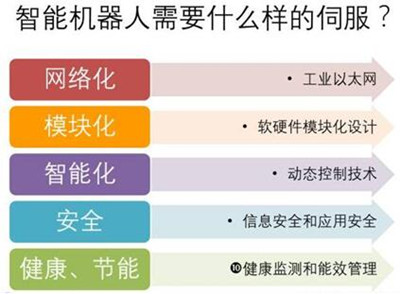
集成化:伺服控製係統的(de)輸出器件越來越多(duō)地采用開關頻率(lǜ)很(hěn)高的新型功率半導體器件,這種(zhǒng)器件將輸入隔離、能耗製(zhì)動、過溫、過壓、過流保護及故障診斷等功能全部集(jí)成於一個不大的(de)模塊之中,構成高精度的全閉環調節(jiē)係統。高度的集成化顯著地縮小了(le)整(zhěng)個控製係統的體積。
智能化:伺服係統的智能化表現在以下幾個方(fāng)麵:係統的所有(yǒu)運行參數都可以通過(guò)人機對話的(de)方(fāng)式由軟件(jiàn)來設置;它們都具有故障自診斷與分析功能;參數自整定的功能等。帶有自整定功能(néng)的(de)伺服單元可以通過幾次試運行,自動將係統的參數(shù)整定出來,並自動實現其最優化。
網絡化:伺服(fú)係(xì)統網絡化是綜(zōng)合自動(dòng)化技術(shù)發展的必然趨勢,是控製技術(shù)、計(jì)算機技術(shù)和(hé)通信技(jì)術相結合的產物。
簡易(yì)化:這(zhè)裏所說的“簡”不是簡(jiǎn)單而是精簡,是根據用戶(hù)情況,將用戶使用的伺服功能予以強化,使之專而精(jīng),而將不使用的一些功能予以精簡,從而降低了伺服係統成本,為客戶創造(zào)更多的收益。
機器人的工作表現(xiàn)受伺服係統影響極(jí)大(dà),因而精密伺服(fú)係(xì)統的關鍵性(xìng)能(néng)指標永遠都是先進性比較的首(shǒu)要因素。國外先進伺服(fú)係統已經能夠很好地適應絕大多數應用的需求,其研發資源集中(zhōng)在個別高端應用及(jí)整(zhěng)體性能提升方麵,處於精雕細刻階段。在工(gōng)業4.0的大背景下,國產伺服任重而道遠(yuǎn),還需努(nǔ)力追(zhuī)趕。
如果您有機床行業、企業相(xiàng)關新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯(jí)部, 郵箱(xiāng):skjcsc@vip.sina.com

")
- 2024年11月 金(jīn)屬切削機床產量數據
- 2024年11月 分地(dì)區金屬切削(xuē)機床產量數據
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘(chéng)用(yòng)車(轎車)產量數(shù)據
- 2024年11月 新能源汽車產量數據
- 2024年(nián)11月 新能源汽車(chē)銷量情況
- 2024年10月 新能源汽車產量(liàng)數據
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切削機床產量數據
- 2024年10月 金屬切削機床(chuáng)產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能(néng)源汽車產量(liàng)數(shù)據
- 2028年8月(yuè) 基(jī)本型乘用車(轎車)產量數據
- 機(jī)械加工過程圖示
- 判斷一台加工中心精(jīng)度的幾種辦法(fǎ)
- 中走絲(sī)線(xiàn)切割機床的發展趨勢
- 國產數控(kòng)係統和數控機床何去何從?
- 中國的技(jì)術(shù)工人都去哪裏了?
- 機(jī)械老(lǎo)板做了十多年(nián),為何(hé)還是小作坊?
- 機械行業最新自殺性營銷,害人害(hài)己!不倒閉才
- 製造業大逃亡
- 智能(néng)時代,少談點智造,多談點製造
- 現實麵前,國人沉默。製造業的騰(téng)飛,要(yào)從機床
- 一文搞懂(dǒng)數控車床加工刀具補償功能
- 車床鑽孔攻螺紋加工方法(fǎ)及(jí)工裝設計
- 傳統鑽削與螺旋銑孔加工工藝的區別