



基於 PLC 的六自由(yóu)度機(jī)械臂控製(zhì)係統研究
2017-6-27 來源:黃河交通學院 作者:屈曉莉,李炎粉
摘要: 六自(zì)由度機械臂是強耦合非(fēi)線性,該特性增(zēng)加了(le)機械臂的控製難(nán)度,這時應對基於 PLC 的六自由度機械臂(bì)控製係統(tǒng)進行全麵分析,以找出相應的解決措施,保(bǎo)證六自由度機械臂可被更好的控製。本文基於自動化生產線中的六自由度機械臂作(zuò)為研究對象(xiàng),對此提出了合理的控製係統,確保六自(zì)由度機(jī)械臂能夠高效且平穩的運(yùn)行(háng)。
關(guān)鍵詞: PLC; 六自由度; 機械臂; 控製係統
0.引言
機械(xiè)臂(bì)可根據一定的程序和軌(guǐ)跡(jì)模仿人手部(bù)的部分動作要求,從而展開自動抓取和搬運,其操作係統是自動化裝置,且機械臂對控製實時性要求極高。隨著科學技術(shù)的(de)發展飛(fēi)速,傳統機械臂(bì)控製係統早已適應(yīng)不了現代化的要求,早期基於 PLC 的機械臂控製係(xì)統輸入 /出較為緩慢,且其間所采用的算法冗餘過多,造成程序掃描時間太長,從而導致電機(jī)控製實時性缺失。因此,分析基於 PLC 的六自由度機械臂控製係統,對我(wǒ)國機械臂控製(zhì)係統研究有著極大現實意義。
1 六自由度機械臂研究發展簡析
六自由度機(jī)械臂也就是(shì)多自由度機械臂,其屬於典型的強耦合多(duō)輸入/輸出(chū)的非線性係統,可以說目前對(duì)機械臂軌跡(jì)快速跟蹤控製研究較多,但其間許多重點還未被(bèi)突破,麵臨諸多(duō)問題。具體而言,機械臂建模及機械臂(bì)控製係統研究是十分關鍵的。
六自由度機械臂絕大多數都是工業型機器人,其可實現自動搬運和裝(zhuāng)配,且可以自動焊(hàn)接與(yǔ)噴塗。固高科技 GRB 係統的(de)六自由度機器人可謂是固高成熟健全的運動控(kòng)製技術,其間具備先進的設計及教學理念,可充分滿足工業現場的各方麵要求,更是教學及科研(yán)機構運動規劃的關鍵(jiàn)內容,亦是編程係統(tǒng)設計最為適宜的對象。
機械臂建模是基於機械(xiè)臂(bì)的相關特點而實現的,往往機械臂分布質量為三(sān)維的,且其屬多(duō)自(zì)由度(dù)結構,以牛頓力學得出機械臂動力學方程式十分困難的,但是基於(yú)拉格開朗(lǎng)日力學則僅獲得相應的能量項,且於許多條件下(xià)應用十分方便; 機械臂控製係統的研究所采用的方式多是模糊自適(shì)應控製及(jí)神經(jīng)網絡自(zì)適應控製,亦或者是魯棒自適應控製和滑模變結構控製,不過(guò)這些方式(shì)實現過程非常(cháng)複雜。而逆係(xì)統方式屬於反饋線性化方式,其強調以對象逆(nì)係統建立可用反饋化方(fāng)式實現的 α 階積分逆係統,主(zhǔ)要是將對(duì)象補償(cháng)為線性傳遞關係係統,也(yě)就是偽線性係統,之後基於此設計控製(zhì)器。
2.六(liù)自由度機械臂結構與 PLC 控製(zhì)係統
2. 1 六自由度機械臂結構
六自(zì)由度機械臂是以六關節串聯形成的結構,其關節傳動是采用絕對編碼器電機和精密諧波(bō)減速器(qì)而實現的。小臂(bì)位置會裝設相應的(de)攝像頭和氣動工具(jù),這些都是其非常關鍵(jiàn)的(de)外部設備接口,且提供相應的電氣接口,用戶也能進行相應的功能擴展。機械臂控製多是集成了 PC 技術及圖像技術和邏輯(jí)控製等,其間還采用專業運動控製技術 VME 運動控製器,其性能(néng)可靠穩定且速度快、精度高。如圖 1 所示,六自由度機械臂簡視圖。

2. 2 PLC 控製係(xì)統
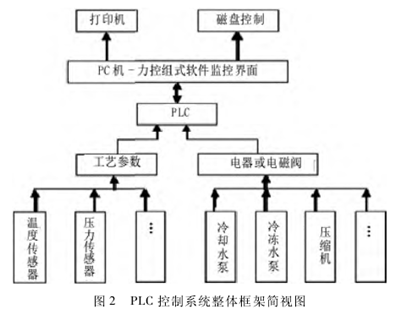
PLC 控製被(bèi)應用(yòng)於各大領域,此類控製係統適應性強,且極具抗幹擾能力(lì),應用(yòng)便捷且簡單,該控製係統應用於機械中(zhōng)意義重(chóng)大。比如用於中央空(kōng)調的(de) PLC 係統,其可實現數據(jù)顯示(shì)和控製及連鎖,同時可保護整個空調係統運行安全,數據顯示功能可(kě)將空調冷(lěng)水出入口及冷卻水出入口溫度有(yǒu)效顯示,還有其蒸汽(qì)閥門開度及溶液泵等數據顯示。可幫助人(rén)們及(jí)時發現其間存(cún)在的問題,並長時間儲存數據,這也是空調發展與研究必不可少的數據支撐; 其控製功能運行方式主(zhǔ)要是軟手動及就地手動(dòng)和自動這三種,而以這三(sān)種功能所構建的空調設備可實現合理調節及快速啟動,從而更好地控製空調開關及運行速度,充分降低能源消耗,以此提升空調的環保性,且強化其經濟性及安全(quán)性。因此,可以說(shuō) PLC 控製係統功能強(qiáng)大且安全可靠,靈活性(xìng)很(hěn)大,應用於機械中的效果及作用一定是很好的。如圖 2 所示,PLC 控(kòng)製係統整體框架簡視圖。
3.基(jī)於(yú) PLC 控製的六自由度機械臂控製(zhì)
3. 1 控製係統(tǒng)構成
基於 PLC 控(kòng)製係統的六自(zì)由度機(jī)械臂設計十(shí)分靈活,其伸縮(suō)擴展很容易實現(xiàn),可以說(shuō)它(tā)的關量控製非常良好,更適宜(yí)於六自由度機械臂設計。且其可實現 PID 回路連續運行,與上位機構能夠(gòu)充分結合,從而形成複雜且多功能的控製係統,比如直接數字控製和分布(bù)式控製係(xì)統。PLC 控製係統應用於(yú)六自由度機械臂設計中,可(kě)實現產品生產過程(chéng)全(quán)方位自動化,以此快速提升生產效率,從而提高生產速度,為相關(guān)企業節省人力資源及各方麵成本。
3. 2 基於 PLC 控製係統(tǒng)的使用
基於(yú) PLC 控製係統具備非常強大的功能,其所采用的(de)編程非常簡(jiǎn)單,且操作便捷。這裏強調的是以簡(jiǎn)單明確的梯形圖及(jí)語句表和邏輯圖實現語言編程,其間(jiān)不(bú)需要過(guò)多的計算機與相(xiàng)關技術,簡(jiǎn)單的學習之後則可充分(fèn)了解其各(gè)項開發及應(yīng)用。同時其所需的開發時間短,可短時間之內(nèi)實現 PLC 開發及應用(yòng),從而合理節約了生產實踐,使得機械臂現場調試簡單有效,可促使機械臂(bì)功能及其組裝等(děng)方麵內容(róng)快速健全,可確(què)保後續檢(jiǎn)修及養護工作更適宜操作。再是基於 PLC 控製(zhì)係統的機械臂可實現在線程序更改,從(cóng)而改(gǎi)善傳統控製方案改進的有效性,確保相應的控製方案更加快速地更改,為相關企業節約更(gèng)多(duō)的人力資源及物力資源,推動企業生產速度,且在此過程(chéng)中盡(jìn)可能地避免其間出現各方麵問題。
3. 3 基於 PLC 控製係統的環境適應性(xìng)
基於 PLC 控製係統可更好地適應諸多惡劣環境(jìng),強化機械臂適應力,且提(tí)高了其抗幹擾能力,確保機械臂運作更為(wéi)安全可靠,這樣(yàng)會比同類機械比較效果更好。且使(shǐ)得(dé)機械臂於更多的環境下(xià)工作和生(shēng)產,甚至(zhì)是非常(cháng)惡劣的環境中也能夠合理避免其間各方麵影響因素,這樣也能保證生產人員安全生產。基於 PLC 控製係統的機械臂生產效率及生產寬度被合理提升,其能夠快速完成許多人力都(dōu)不能完成的工作,從而推動生產力(lì)的進一步提升,這(zhè)樣也能更好地提升(shēng)中國在國際上的競爭力,以便提升我(wǒ)國在國際上的地位。具體而言,基於 PLC 控製係(xì)統在運行時(shí),其主(zhǔ)要是分為三個階段,這裏強調的(de)是輸入采樣及輸出刷新與用戶程序的全麵執行。其(qí)間所蘊(yùn)含(hán)的階段強(qiáng)調的是 PLC 控製係統工作周期的全方位掃(sǎo)描,在此過程中,可(kě)按照相應的掃描速度進行連續不斷的(de)循(xún)環(huán)掃描(miáo); 我國氣動控製及電動接卸領域對 PLC控(kòng)製係統的應用十分(fèn)廣泛,且此類技術亦推動了閥島技術發展,機械臂領域對此(cǐ)的應用亦是非常廣泛,該控(kòng)製係統使得機械臂操作更簡單便捷,同時其功能也被不斷擴大。
4.基於(yú) PLC 的六自由度機械臂控製係統設(shè)計實現(xiàn)
4. 1 係統硬件設(shè)計
六自由度機械臂控(kòng)製係統設計主要是由工控機及 PLC與觸摸(mō)屏,加上伺服驅(qū)動(dòng)器及同步交流電機(jī)與編碼器構成。工控機及觸摸屏屬於監控層(céng),其主要作用是監控機械臂運(yùn)行情況,而 PLC 屬於控製層用戶可於工控機中編寫程(chéng)序(xù),同時將其下載至 PLC 中,從而更好地控製 PLC 伺(sì)服驅(qū)動,保證其間各個伺服電機能夠合理(lǐ)協調,並實(shí)現同步運行。
4. 2 係統軟件設計
4. 2. 1 PLC 軟件(jiàn)設計(jì)
控製(zhì)係統程序運用的是模塊化編程思想,從而(ér)把驅動參數(shù)快速初始化,這時機械臂(bì)可快速回到原點,再采用運動學正解(jiě)及反解和路徑規劃實現程序功能塊,而這些都是非常重要的子程序,從而保證程序結構更夠清晰且(qiě)快(kuài)速修改。
4. 2. 2 運動學正反解算法設計
其間采用的(de)伺服電機應改變(biàn)轉角來驅動機械臂工作,要將平動盤位置合(hé)理定(dìng)位,同時並聯機械臂係統,這裏強調的是將其與電機轉角準確轉換,而(ér)其間互相轉換主要是運(yùn)動學正解算法及(jí)運動學反解算法這兩方(fāng)麵: 正解算法則是其間所采用的各台伺(sì)服電機轉角可推(tuī)算平(píng)動盤(pán)於(yú)平麵中的位置; 反解算法(fǎ)則強調(diào)的是以平麵中(zhōng)平(píng)動盤(pán)合理推算電機中軸的旋轉角(jiǎo)度。
4. 2. 3 人機界麵設計
通(tōng)常是選擇合理的監控程序設計監控軟件,以機械臂控製係統對監控功能提出的要求(qiú)。具體而言,監控係統主要是下述幾方麵構成: 其一,主界麵。主(zhǔ)界(jiè)麵可全麵顯示六自由度(dù)並聯機械臂的實際結(jié)構,還有其電機左右抱閘(zhá)控製及伺服鎖定控製,且采用指示燈來指示狀態(tài),從而及時觀測(cè)機械臂實時位置; 其二,自動控製界麵。此界麵中具備機械(xiè)臂的自動運行按鍵,比如自動啟動及(jí) STOP 等(děng)類按鈕,亦可設置自動運行中的許多位(wèi)置和屏障高度,且此界麵還應設置適(shì)宜(yí)的鐵片,其厚(hòu)度應適宜六自由度機械(xiè)臂控製(zhì),還有其循環次(cì)數及運動速度等類參數; 其三,手動控製界麵。該界麵可實現機械臂的手動操作,比如其(qí)相應的點動,並嚴格指定相關位置絕(jué)對移動; 其四(sì),報警(jǐng)界麵。此界麵主要是以(yǐ)指示燈(dēng)指示相應的(de)方向,警示(shì)其越限(xiàn)和軸錯誤,同(tóng)時設置相應(yīng)的按鈕(niǔ),如果出現越限警報,則可及時按(àn)下清除按鈕(niǔ)將機械臂恢(huī)複於原始(shǐ)位(wèi)置。
5.結束語
隨著國家經濟水平的(de)快速提升,科學技術亦隨(suí)之飛(fēi)速發展,各類(lèi)高性能(néng)及多功能機械被研(yán)發和應用。基(jī)於 PLC 控製係統的六自由度機械臂快速推(tuī)動了我國(guó)機械臂功能水平(píng)的提升,且促進了我國六自由度機械(xiè)臂(bì)的進一(yī)步發展(zhǎn),可推動我國工業生產及機械製造業的快速(sù)發展,以此促進我國經濟水平的快速提升,從而提升我國在國際上的競爭力,同時也提高了我國(guó)的(de)國際地(dì)位。本文對六自由度機械臂(bì)研究(jiū)發(fā)展進行了簡析,並探討了六自由(yóu)度機械臂結構與 PLC 控製係統,全麵分析了基於 PLC 控製的六自(zì)由度機械臂(bì)控製,對基於 PLC 的六自由度(dù)機械臂控(kòng)製係統設(shè)計進行了實現分析,為我國機械臂控製係統設計水平的提升提供可靠的(de)理論性(xìng)依據。
投稿箱:
如果您有機床行業(yè)、企業相關新聞(wén)稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業(yè)、企業相關新聞(wén)稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業界視點
| 更多

行業數據
| 更(gèng)多
- 2024年11月 金屬切削機床(chuáng)產量數(shù)據
- 2024年11月 分(fèn)地區金屬切削機床產量數據
- 2024年11月 軸承(chéng)出口情況(kuàng)
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源汽車銷量(liàng)情況
- 2024年10月 新能源汽車產量數據
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切削機床產量數據(jù)
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本型乘用車(轎車)產量數據
博文選萃
| 更多