陽機床")



基於 PLC 的(de) RV 減速機(jī)實驗台係統的設計與實(shí)現
2017-6-9 來源:天津職業技術師範大學機械工程學院(yuàn) 作(zuò)者:黃賢振
摘要(yào):減速機是工業機械臂重(chóng)要的核心零(líng)部件(jiàn),它的主要作用是把機械臂中交流(liú)電機高轉(zhuǎn)速、低扭矩的輸出轉換成低轉速、大扭矩的輸出。 一般大負載的(de)情況下通(tōng)常選用(yòng) RV 減速機。本文中通過設計基於 PLC 控製技術模擬工業機械臂的肘(zhǒu)關節,驗證(zhèng)多段速情況下減速機實際輸出曲線。該實驗(yàn)台以(yǐ) PLC 為(wéi)核(hé)心控製器,通過變頻器(qì)控製實(shí)現交流電機的多端速,通過模擬量模塊檢測交流(liú)電機工作過程中的實時(shí)轉速,通過張(zhāng)力控製器模擬機械臂工作的(de)負載。
關鍵詞:RV 減速機;PLC;人機交互(hù)界麵;模擬量
隨著機器人產業的發展,工業(yè)機器(qì)人作為最為重要的一個分支,近年來取得長足的進步。其(qí)中減速機是最為核心的關鍵技術(shù),減速機中應用最為廣泛(fàn)的有諧波減速機和 RV 減速機。其中諧(xié)波減速機具有傳(chuán)動速比大、傳動精度高等(děng)優點,但是容易產生交變應力,造成疲勞(láo)破環,散熱條件差。RV 扭矩大、承受(shòu)過載能力高、傳(chuán)動(dòng)效率高,較為廣泛的應(yīng)用在機械臂中。
1.硬件組成(chéng)
1.1 硬件係統組成(chéng)
使用 PLC 作為核心控製(zhì)器,PLC 通(tōng)過編寫的程序控製變頻器實現交流電機的多端速運行,交流電機的輸出(chū)轉速可以通過模擬量模塊進(jìn)行實時的檢測監控,張力控製器通過控製電流的大小調整磁粉的輸出實現模擬負載的(de)效果。同時試驗台係統中的所有變量都(dōu)可以通過人機界麵進(jìn)行監控、調整(zhěng)。
1.2 係統硬件的(de)選擇(zé)
1.2.1 PLC
PLC 的選(xuǎn)擇主要要考(kǎo)慮機型、容量、I/O 模塊、電源模(mó)塊、特殊功能模塊。
本文試驗台(tái),所需要輸出點 5,輸入(rù)點(diǎn)用觸摸屏仿真(zhēn)處理所以輸入點不做要求,同(tóng)時(shí)需要需用 4 通道的模擬量模塊監控交流電機的轉速(sù)。綜上分析 PLC 控製器選用西門子 S7- 200 係列 CPU- 22(AC/DC/RLY)。
1.2.2 人機界麵
選用昆侖通泰的 MCGS 觸(chù)摸屏來作為試驗台的人機交互界(jiè)麵。利用觸摸屏來控製係(xì)統的啟動、停止、多端速的選擇、轉速曲線監控、報警數據的(de)存儲(chǔ)等(děng)功能。使操作更加的方便,並節省 PLC 的輸入點的(de)應用。
2.控(kòng)製係統(tǒng)組成
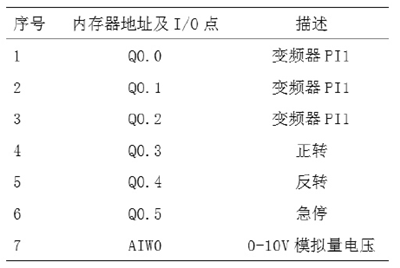
2.1 PLC 內部寄存器分配及 I/ O 分布表
表(biǎo) 1 係統控製 I/ O 分布表
2.2 PLC 程序設計
1)將(jiāng)變頻器的模擬量信號采集到 PLC,應用 EM232 的模擬量(liàng)借口采集到模擬量信號存儲到 AIW0 存儲器。
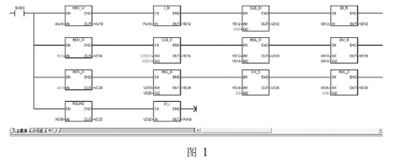
2)多段速調速方法。通(tōng)過控製 Q0.0 Q0.1 Q0.2 三個輸出端子的通斷狀態,實現變頻器的(de) 7 段調速。

3.係(xì)統(tǒng)調試
操作界麵主要由:數據顯示、實時報(bào)警、實時曲線、數據報表、參數設定、密碼設置等(děng)界麵組(zǔ)成。實時曲(qǔ)線畫麵可以實時(shí)的反饋電機轉速的信息,觀察電機的速度曲(qǔ)線,如圖 3 所示。
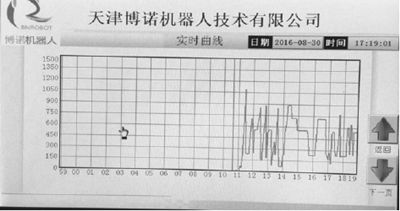
圖 3 電機(jī)實(shí)時轉(zhuǎn)速監控
4.實踐與經驗
本試(shì)驗台中應用廉價的(de)交流電機替代了昂貴的伺服電機,應用PLC 控製器替代了工業機器人的核心(xīn)控製器,利用張力控製器模擬負載(zǎi),真實的模(mó)擬了機械臂工作情況。為檢測 RV 減(jiǎn)速機的(de)生產質量以及研究(jiū) RV 減速的工作性能提供了(le)有力的輔助工具。
投稿箱(xiāng):
如果您有機床行業、企業(yè)相(xiàng)關新聞稿件發表,或進行(háng)資訊(xùn)合作(zuò),歡迎聯係本網編輯部(bù), 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業(yè)相(xiàng)關新聞稿件發表,或進行(háng)資訊(xùn)合作(zuò),歡迎聯係本網編輯部(bù), 郵箱:skjcsc@vip.sina.com
更多相關信息

業界視點
| 更多

行業數據
| 更多
- 2024年11月 金屬切削機床產量數(shù)據
- 2024年11月(yuè) 分地區金屬切削機(jī)床產量數據
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車(chē))產量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產量數據
- 2024年10月 軸(zhóu)承出口情況
- 2024年10月 分地區金屬切(qiē)削機床產(chǎn)量數據
- 2024年10月(yuè) 金屬切削機(jī)床產量數據
- 2024年9月(yuè) 新能源汽車銷量情況
- 2024年(nián)8月 新能源汽車產量數(shù)據
- 2028年8月 基本型乘用車(轎車)產量數據
博文選(xuǎn)萃
| 更多
- 機械(xiè)加工過程圖示
- 判斷一台(tái)加工中心精度的幾種辦法
- 中走絲線(xiàn)切割機床的發展趨勢
- 國(guó)產數控係(xì)統和數控機床何去何從?
- 中國的技(jì)術工人都去哪裏了?
- 機械老板做了十多(duō)年,為何還是小作坊(fāng)?
- 機械行(háng)業最新自殺性營銷,害人害己!不倒閉才
- 製造業(yè)大逃亡
- 智能時代(dài),少談點智造,多談點製造
- 現實(shí)麵前,國人(rén)沉默。製造業的(de)騰飛,要從機床
- 一文搞懂(dǒng)數控車床(chuáng)加工刀具補償功能
- 車床鑽孔攻螺紋加工方法及(jí)工裝設計(jì)
- 傳統(tǒng)鑽削(xuē)與螺旋銑孔加(jiā)工工藝的區別(bié)