



超低速大慣量比永磁(cí)同步電機高精度位置伺服控製研究
2017-8-11 來(lái)源:上海大學機電工程與自動化學院,上(shàng)海 作者: 趙劍飛 劉建(jiàn)波 丁朋飛 翟雪鬆
摘要:針對航天係統中超低速、大慣量比條件(jiàn)下永磁同(tóng)步電機(PMSM)高精度位(wèi)置伺服控製這(zhè)一難題,通過建立PMSM數學模型,基於矢(shǐ)量控製策略,采用電流環、速度環及帶(dài)速度前饋位置環的三閉環控製結構,建立了基(jī)於直驅方式的 PMSM位置伺服控製係(xì)統,並對(duì)其控製環路(lù)進行設計。 在(zài)此基礎上(shàng)對伺服係統的(de)位置(zhì)跟蹤性能進行了分析和驗證。 最後基於 EAS開發平台對(duì)係(xì)統進行(háng)了實現。 實驗結果表明:基於直驅方式的 PMSM 能夠實現(xiàn)超低速、大慣量比條件下的高精度位置伺服控(kòng)製,其位置控製精度小於 3 角秒,能夠為航天係統應用設(shè)計提(tí)供參考依據。
關鍵詞:超低速,大慣量比(bǐ),高精度,永磁同步(bù)電機(jī),位(wèi)置伺服,PI 調節器
具有超低速、大(dà)慣量比(bǐ)、高精(jīng)度的電機伺服係統被廣泛應用於航天設備(bèi)上。 為了實現高(gāo)性能控製,研究者分別從伺服驅動係(xì)統中的控製策略、檢測元件、執行機構等方麵進行了分析和研(yán)究。文獻采用基於 DSP 與 CPLD 的數(shù)字控製器,結(jié)合矢量控製算法,也提高了 PMSM 位置控製精度。 但都沒有對超低速、大慣量比條(tiáo)件下(xià)永磁同步電機的位置伺服控(kòng)製問題進行深入研(yán)究。 本(běn)文對基於永磁(cí)同步電機的高精度位置伺服控製問(wèn)題進行研究,基於永磁同步電機(jī)數學(xué)模型,對其控製環路進行具體設計。
1 .高精度(dù)位置伺服係統構成與控製環路設計(jì)
1.1 基於 PMSM 的高精度伺服係統的構成
衛星掃描機構(gòu)地麵模擬裝置是一種高精度的位置(zhì)伺服控製係統,負載為掃(sǎo)描鏡,負載與電機轉動慣量比很大(dà),掃描速度低,最大轉速為每分鍾幾轉,位置控製精度要(yào)求(qiú)高,一般在角秒級。該係統具體構成如圖 1 所示:
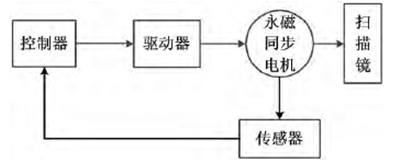
圖 1永磁同步機伺服係統構成
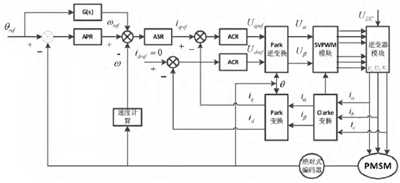
係統設計采用電流環、 速(sù)度環及帶(dài)速度前饋位(wèi)置環的(de)多閉環控製結構(gòu),PMSM 采用在 d、q 同步旋轉坐標係下 id=0 時(shí)矢量控製方式下的數學模(mó)型。 控製環路設計包括電流環調節器(ACR)、速度環調節器 (ASR)、位置(zhì)環調節器 (APR)及速度前饋調節器(qì) G(s)的設計。 係統控製結構圖如圖 2 所示(shì)。
1.2 電流環設(shè)計
圖 2 所示永磁同步電機控製結(jié)構中,內環是電流環,在電流環中,電流調節器(ACR)控製對象由(yóu)逆變器和永磁同步電機組成。 在 PMSM 動態結構中,反(fǎn)電動(dòng)勢變化較慢(màn),通常認為電流瞬變過程中反電動勢基本不變, 因此在(zài)設計電流環時可以忽略其(qí)動態影響。 另外,逆變器是一階慣(guàn)性環(huán)節,其 傳遞函數為 :

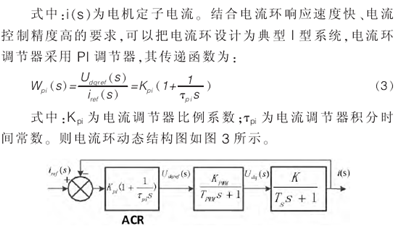
圖 3電流環(huán)動態結構圖

1.3 速度環設計
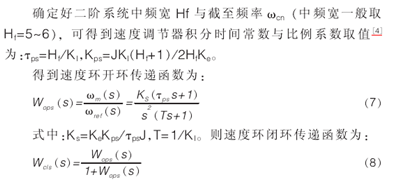
忽略轉子阻尼情況下,為了(le)設計(jì)速度環調節器,對式(4)所示電流環傳遞函數采用高階係統降階近似處理方(fāng)法, 忽略高次項。 可以得到速度環(huán)控製對象傳遞函數為:
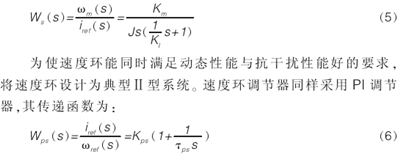
式中:ωref(S) 為 電機機械角速度參考值 ;Kps為速度調節器比例(lì)係數;τps為速度調節(jiē)器積分時間(jiān)常數得到整個速(sù)度環的(de)等效動態結構圖如圖 4 所示。
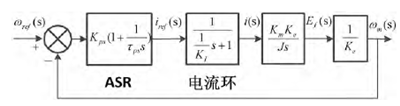
圖 4速度(dù)環動態結構圖
1.4 位置(zhì)環設計
位置環為係統(tǒng)的最外環,直(zhí)接接收(shōu)外部(bù)位置控製指令(lìng),位置調(diào)節器控製對象為速度環和一個速度積分環節。為了便於分析,與設計速度環類似, 設計位置環時可以對速度環傳遞函(hán)數采用高階係(xì)統降(jiàng)階近似處理方法,可以得到位置環控製對象傳遞函數為:

位置(zhì)調節器要求(qiú)控製的快速性。 將位置環設計為典型 I 型係統(tǒng),係統階躍(yuè)輸(shū)入響應無穩態誤差,但響應速度慢,而對斜坡(pō)輸入響(xiǎng)應會產生穩態誤差,無法(fǎ)滿足位置跟蹤控製精度的(de)要求。為此,在位置環加入速度前饋控製,與位置反饋一起構成複合控製,得到位置環動態(tài)結構如(rú)圖 5 所示。
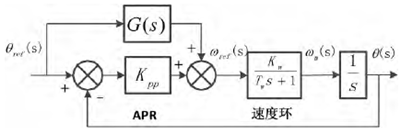
圖 5位(wèi)置環動態結構圖
但理想的微分環節是不存在的, 而且高階微分運(yùn)算實現困難,還會引(yǐn)入高頻幹擾信號,所以前饋環(huán)節(jiē)一般采(cǎi)取 G(S)=αS(α 為速度前饋微分係數(shù) )的 普遍形式。 通過實(shí)驗方法選(xuǎn)擇合適的微分係數,從而完成位置環設計。
2 .位(wèi)置伺服控製實驗測試結(jié)果(guǒ)
為進一步驗(yàn)證控製環路設計(jì)的有效性, 搭建永磁同步電機位(wèi)置(zhì)伺服(fú)控製係統實(shí)驗平台。 實驗中采(cǎi)用 Kollmorgen 公司的RBE-2110B 永磁同步電機 ,電機直驅轉動慣量為 0.06kgm2 的掃描盤;編碼器選用德國海德漢公司 26bit 絕對式編碼器;電機驅動器采用 Elmo 公司 Gold 係列驅動器,基於 EAS 軟件開發平(píng)台進行位(wèi)置伺服控製程(chéng)序開發。
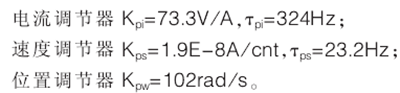
2.1 控製環路參數設計
通過 EAS 軟件對係統進行(háng)參數(shù)辨識,根(gēn)據辨(biàn)識結果,結合實驗方法進行控製(zhì)器(qì)參數調整,依次設計出(chū)電流環調節(jiē)器、速度環調節器、位置環調節器的參數。 設計的各調節器參數為:
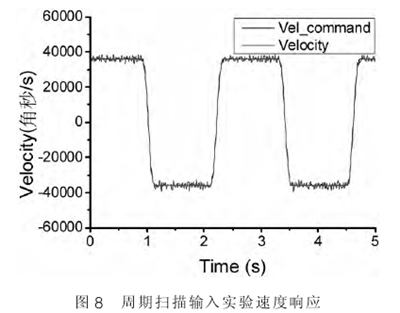
2.2 周(zhōu)期(qī)掃描輸入(rù)係統響應實驗測試
如前所述,按照實際係統設計中的掃描運動規律,給定實驗係統周期位置掃描輸入, 係統在該輸(shū)入下的位置跟蹤(zōng)實驗結果如圖 6~圖(tú) 8 所示。
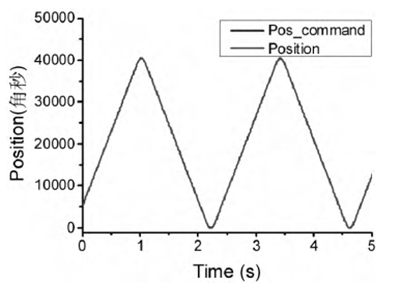
圖 6周期掃描輸(shū)入位置跟蹤實(shí)驗結果
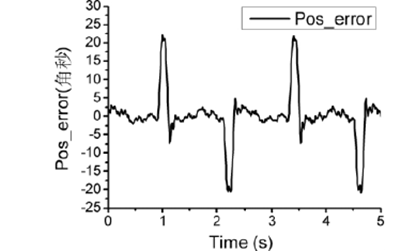
圖 7周期掃描輸入位置跟蹤誤差
由圖看出實驗結果與設計(jì)預期總體趨勢一致, 係統在掃描轉向階段位置誤差(chà)較大,但仍然能夠快速跟上給定位置,在勻速掃描階段開始前進入 3 角秒的位置誤差範圍, 能(néng)夠(gòu)滿足係統設計要求。
DC / DC 變換器(qì)的 EMI 測試包括傳導幹擾測(cè)試和輻射幹擾測試。 參(cān)考 GBT18655 標準(zhǔn),對於傳導幹擾測試的頻域要求是150k Hz~108MHz,圖 8a 是(shì)優化前低壓輸出端正極傳導幹擾均值和峰值的測試結果。 可以得出,DC/DC 變(biàn)換器低壓輸出端在 40MHz頻點周圍的(de)傳導幹擾達到 74.8d BμV,超出標準限值(50d BμV)接近25d BμV,結果表明 DC / DC 變換器開關過程中形成了嚴重的傳導幹擾。 圖 8b 和 c 是(shì) DC / DC 變換器在 150k Hz~200MHz 頻(pín)域範圍內垂直方向的(de)輻射幹擾測試結果, 可以觀察到,200k Hz頻點周圍的(de)輻射幹擾超過限值約(yuē) 4d BμV,在 67MHz 和 76MHz處分別(bié)超過限值 10.5d BμV、12.3d BμV,表明 DC / DC 變換器開(kāi)關過程中形成了嚴重的輻射幹擾。
圖 9 給出了增加(jiā)優化措施後的 DC / DC 變換器實驗波形,其中圖 9a 是優化後低壓輸出端正(zhèng)極傳導幹擾測試結果, 圖 9b和 c 是優化後 DC / DC 變換器在 150k Hz~200MHz 頻域範圍內(nèi)垂直方射幹擾測試結果。 實驗結果表明,通過(guò)增加包括應用(yòng)軟開關(guān)技術,增加(jiā)輸出整流二極(jí)管吸收電路,\改善(shàn) EMI 濾波器,減小分布及寄生參數等優化措施後,大幅度降低了 DC / DC變換器的(de)傳導幹擾和輻 射幹(gàn)擾 , 使 DC / DC 變 換 器 達 至GBT18655 標準。
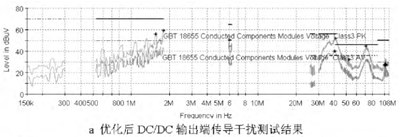
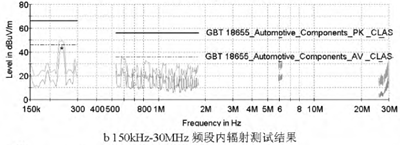
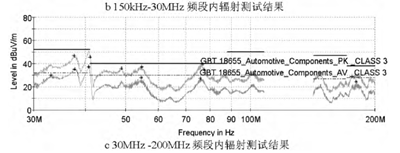
圖 9優化後實驗波形
3 .結(jié)束語
製作的 2k W 樣機有效利用移相全橋軟開關技術、EMI 濾波技術,並改善吸收電路和分布參數等措施,驗證優化後的 DC /DC 變換(huàn)器電磁幹擾達到了 GBT18655 標準的基本要求 , 改善(shàn)了電動汽車(chē) DC / DC 變換器的(de)電磁環境。
投稿箱:
如果您有機床行業、企業相關新聞稿件(jiàn)發表,或進行資訊合作,歡迎聯係本網編輯部, 郵(yóu)箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件(jiàn)發表,或進行資訊合作,歡迎聯係本網編輯部, 郵(yóu)箱:skjcsc@vip.sina.com
更多相關信息

業界視點(diǎn)
| 更多

行業數據
| 更多
- 2024年11月 金屬切(qiē)削機床產量數據
- 2024年11月(yuè) 分(fèn)地區金屬切(qiē)削機床產量數據
- 2024年11月 軸(zhóu)承出口情況
- 2024年11月 基本(běn)型乘用車(轎車)產量(liàng)數據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新(xīn)能源(yuán)汽(qì)車銷量(liàng)情況
- 2024年10月 新能(néng)源汽車產量數據(jù)
- 2024年10月(yuè) 軸承出口情況
- 2024年10月 分地區金屬切削機床(chuáng)產量數據
- 2024年(nián)10月 金屬(shǔ)切削機床(chuáng)產量數據
- 2024年9月 新能源汽車銷量(liàng)情況
- 2024年8月 新能源汽車(chē)產量數據
- 2028年8月 基本型乘用車(轎車(chē))產量數據
博文選萃
| 更多