


小徑深孔鑽削鑽頭位置同步檢測(cè)係統
2018-2-9 來源: 中北大學 機械與動力工(gōng)程學院(yuàn) 作者:李(lǐ)川懷 王 彪 楊福合 董文心
摘(zhāi) 要: 針對加工小徑深孔時檢測裝置無法放入深孔內部進行鑽頭位置檢測和檢測(cè)結果受工件表(biǎo)麵形狀影響(xiǎng)較大的實際(jì)問題,提出了基於超聲波檢測技術和激光位移傳感器檢測(cè)技術的同步位移檢測方法,建立了以PLC、上位工控機和同步檢測裝置組成的檢測係統。設(shè)計了同步檢測裝置和檢測係(xì)統,並對檢測係統進行了分析。從而為提高小徑深孔加工質量供(gòng)了(le)一種新檢測技術(shù),該(gāi)係統能滿足檢測要求,對(duì)深孔鑽頭位置(zhì)檢測具有一定的前景。
關鍵(jiàn)詞: 深孔; 鑽頭位置; 超聲; 激光位移(yí)傳感器(qì); 檢測
深孔通常是指長度大於直徑 5 倍以上的孔,深孔加工在切削領域占有重要的位置,尤其是小直徑深(shēn)孔的加工,鑽(zuàn)頭在半封閉或封閉狀態下進行加工(gōng),排屑困難,切削熱不易擴散,刀杆細長且強度低,鑽(zuàn)頭易走(zǒu)偏。
檢測裝置不能進入深(shēn)孔內部進行(háng)實時檢測,因此,無法觀察鑽頭的實際位置,導致加工(gōng)過程中出(chū)現(xiàn)大量不合格產品或鑽頭折斷。另外(wài),由(yóu)於檢(jiǎn)測裝置受到檢測(cè)工件外形的影響,檢測結果誤差較大,不能準(zhǔn)確反映鑽頭的位置,在加工小徑深孔過程中,實時檢測(cè)鑽頭的走偏情況,采取合(hé)理措施對(duì)鑽頭進行糾偏具有重要意義。
本文(wén)基於超(chāo)聲波的工作原理和激光位移傳感器測量技術 ,設計了(le)一種以超聲波(bō)檢測和(hé)激光檢測(cè)為基礎的小徑深孔加工鑽頭位置檢測係統。係統通過超聲波測量孔的壁厚,用激光位移傳感器對測量(liàng)誤差進行(háng)補償,及時反饋鑽頭在測量(liàng)方向的(de)實際位置,為小徑深孔加工過(guò)程中刀具糾偏提供指導(dǎo),提高小徑深孔加工的質量.
1 、超聲波和激光位移傳感器的檢測原理(lǐ)
1. 1 超(chāo)聲波檢測的(de)工(gōng)作原(yuán)理
超聲波是一種頻率(lǜ)高於兩萬赫茲的聲波,傳(chuán)導方向性好,無法被(bèi)人耳接收。當超聲波(bō)頻率達到兆赫茲以上時,在金屬(shǔ)和液體中的傳播性很好,但(dàn)在空氣中(zhōng)很難傳播,因而可以用超聲波來檢(jiǎn)測金屬材料物體(tǐ)。其原理如圖 1 所示,若已知(zhī)超聲波在被測金屬材料中的傳播速度,當超聲波探頭發出的超聲波脈衝通過被測(cè)物體到達金屬材料與空氣的分界麵時,脈衝波被反射回探(tàn)測頭,通過測定超聲波發射時間 T 和接收到反射超(chāo)聲波(bō)的(de)時(shí)間 B 計算出超聲波(bō)在物體中傳播的時間,進一步計算出物體的厚度。
在小(xiǎo)徑深孔(kǒng)加工過程中,采用脈衝式超聲波測厚儀,其通過超(chāo)聲波的反射原理來測量深孔壁的厚度,間接測量鑽頭(tóu)在此方向的位置。通過超聲波測量(liàng)物體厚度的原理,超聲波探頭( 換能器) 發出的超聲波在深孔工件內部傳播時(shí),當遇到孔壁,反射的超聲波波幅會增大,其中一部分反射回探頭,另一部分沿軸向在零件內反複(fù)折射而消(xiāo)耗(hào)掉。
假設(shè)超聲波在被測零件中的傳播速度為 C,超聲波由(yóu)外(wài)表麵反射回探頭用的時間(jiān)是 T1,由內表麵反射回探頭用的時間為 T2,通(tōng)過時間延遲,可計算出(chū)超聲(shēng)波在孔壁間傳播的時間,那麽工件在所 測 方 向 的 壁 厚 L =C( T2- T1) /2,對數據(jù)進行分(fèn)析處理即可反映鑽頭在此方向上的(de)位置。
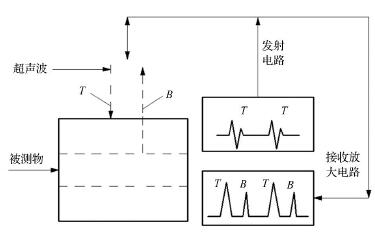
圖(tú) 1 超聲波檢測原理圖(tú)
1. 2 激光位傳感(gǎn)器的(de)工作原理(lǐ)
激光位傳感器在機械工程的測量領(lǐng)域得到(dào)廣泛的應用,主要通過激光 三 角 法 對 被檢測的形狀、位移(yí)、厚度等進行測 量。 激光位移傳(chuán)感器檢測原理如圖 2所示,激(jī)光發射器發出的激光線經過會聚透鏡,投射到被測物體表麵,會聚透鏡的光軸與接收透鏡的光軸交於參考麵上的 O 點,並將 O 點經接收透鏡成像於探測(cè)器的 O'點,當被測物體(tǐ)高度發生(shēng)變化時( 以表(biǎo)麵下移為(wéi)例) ,導致光斑將沿入射光軸移動,像點將在探測器敏感麵上發(fā)生位移。
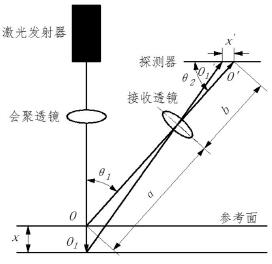
圖 2 激光位移傳感器檢測原(yuán)理圖
若光斑在探測器敏感麵上的位移為x',利用相似三角形各邊之間的比例關係(xì),可以(yǐ)求出被測表麵的(de)位移:

式中: x 為被測表麵到參考表麵的位移; x'為(wéi)光(guāng)斑在探測器敏感麵上的位移; α 為投影光軸和成像(xiàng)光軸的交點 O 到接收透鏡中心的距離; b 為(wéi)接收透鏡中心到探測器敏感麵點 O'的距離; θ1為成像(xiàng)光軸與參考麵法線的夾角; θ2為成像光軸與探測器敏感麵的夾角。若被測(cè)麵位於參考麵的上方,則(zé)式( 1)分母取“+ ”。由式( 1) 可知,隻要測出(chū)光(guāng)斑在探測器敏感麵上的位移,就可以計算出(chū)被測麵的位移。
2 、鑽頭位置檢測係統的(de)組成和原理(lǐ)
加工小徑深孔時,鑽頭位置檢測係統采用超聲波(bō)測量(liàng)物(wù)體厚度技術(shù)實現了小徑深(shēn)孔加工鑽(zuàn)頭位置的無損檢測,利用(yòng)超聲波探頭(tóu)發射、接收超聲波,用激(jī)光位移傳感器進(jìn)行測量誤差補償。小(xiǎo)徑(jìng)深孔加工鑽頭位置檢(jiǎn)測係統總體布局,如(rú)圖3 所示,主要由數控深孔鑽床床身、超聲波發射接收探頭、同步位(wèi)移裝置、激光位移傳感器、上位機、PLC 等組成。
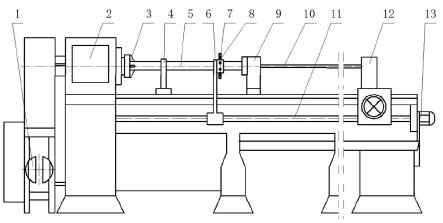
1. 主軸電(diàn)機 2. 觸摸屏 3. 三抓卡盤 4. 中心架 5. 工件6. 同步(bù)位移裝置 7. 激光(guāng)位移傳感器(qì) 8. 探頭 9. 噴霧裝置10. 鑽杆 11. 絲杠 12. 負壓排屑裝置(zhì)
13. 進給電機(jī)
圖 3 鑽頭位置檢測總體結構示意圖
鑽頭位置檢測係統以數(shù)控深孔鑽床為基礎平台,無(wú)需停止機床的加工過程,即可實現同步檢測,其檢測原理如(rú)圖 4所示,在機床導軌上安裝同步位移裝置(zhì),將超(chāo)聲波探頭和激光位(wèi)移傳感器固定在同(tóng)步位(wèi)移裝置的相應位置(zhì)。根據工(gōng)件的外形尺寸,在探頭自由伸(shēn)縮狀態下,調(diào)整(zhěng)探頭到 H 高度(dù),以鑽頭理論中心為圓心、探(tàn)頭高度調整值 H 為(wéi)半徑(jìng)畫圓,得(dé)到深孔的虛擬參考外壁,通過(guò)鑽頭半徑 R 和探頭高度調整值 H計算出(chū)虛擬參考孔壁(bì)的厚度(dù):
加工過程中,用(yòng)帶(dài)動鑽頭做(zuò)進給運動(dòng)的電機驅動同步位(wèi)移裝置,檢測裝置和鑽頭作同步運動,在圖示位置對探頭所在方向上的(de)鑽頭位(wèi)置進行檢測,用超聲波探頭和激光位移傳(chuán)感器分別測量當前位置實際孔壁厚 L1和探頭的位移量 S1,由L1、S1計算出實際(jì)深孔被檢測母線到虛擬參考外壁的厚度
由式(shì)( 2) 和式( 3) 可計算出深孔在被檢測位置偏離理論(lùn)位置的偏(piān)移量( 即鑽頭位置的偏移量) :
若 S2> 0,則表(biǎo)明鑽頭向靠近探頭的方向(xiàng)偏移; 若 S2<0,則(zé)表明鑽(zuàn)頭向背離探頭的方向偏移。用上述方法測量鑽頭的(de)偏移量,避免了因工件外形的直(zhí)線度、圓度、表麵缺陷(xiàn)等產生(shēng)的測量誤差。
在加(jiā)工小徑深孔過程中,為了更精確(què)的檢測鑽頭的實際位置,在 360°圓周範圍(wéi)內,每隔 45°作為一個檢測方向,采用(yòng)單個點測量的方法,沿進給方向每間隔 10 mm,8 個探頭同(tóng)時(shí)對深孔(kǒng)的 8 個方向的壁厚進行測量,根據(jù)測量結(jié)果計算出孔在各個方向(xiàng)上的偏移量,對偏移量進一步處理,即檢測出鑽頭在 8 個檢測方向上各自母線的位置,反映出鑽頭的實際位置。
3 、鑽頭位置(zhì)檢測裝置結構
小徑深孔加工過程中,同步位移(yí)裝置帶動鑽頭位置檢測裝置與鑽頭進(jìn)行同步(bù)軸向移動,因此要求鑽頭位置檢測裝置適應工件外形的(de)直線度和圓度的(de)變化,能自動進行探(tàn)頭位(wèi)置調整(zhěng),並對超聲波測(cè)量結果的誤差進行(háng)補償,其結構如圖 5所示(shì),在結構中采用複位彈簧自動調整探頭的(de)位置,即(jí)探頭可根據(jù)偏差沿徑向進行自由伸縮,為適應不同尺寸的工件,可對刻(kè)度導套的位置(zhì)進(jìn)行調整,迅速地將(jiāng)探頭調到最(zuì)佳位置,探頭保護罩上的小(xiǎo)孔可向探頭(tóu)和工(gōng)件之間注入傳(chuán)聲耦合劑( 甘油) ,使探頭和被測(cè)工件間沒有空氣間隙,方便(biàn)超聲波傳播。
在探頭尾部用導(dǎo)杆連接,既可(kě)以對探頭進行導向,又方便激光位移傳感器進行探頭徑向位移測量,對工件外形的直線度和圓度產生的測量誤差進行補償。為減小(xiǎo)摩擦力,盡量減小磨損,將探(tàn)頭保護(hù)罩前端接觸(chù)部(bù)位設計成滾珠接觸。
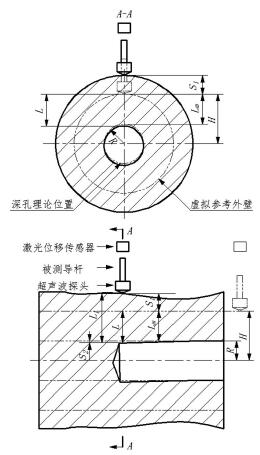
圖 4 鑽頭位置(zhì)檢測原理圖
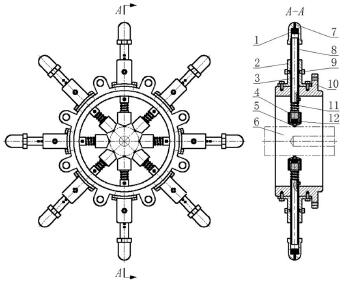
1. 激光位移傳(chuán)感器 2. 刻度導套座 3. 導杆 4. 探頭保護罩5. 接觸滾珠 6. 被(bèi)測工件 7. 傳感器固定座 8. 刻度導套 9.球頭螺釘 10. 支座 11. 複位彈簧
12. 超聲波探頭
圖 5 鑽頭位(wèi)置檢測裝置結構圖
4 、鑽頭位(wèi)置檢測控製係統結構
鑽頭(tóu)位置檢測控製係統結構,如圖 6 所示(shì),主要由 PLC、工控機、超聲波測厚(hòu)儀(yí)、數據采集卡、超聲波接收(shōu)電路、激光位移傳感器等(děng)組成。超聲波測厚儀利用壓電效應(yīng)製成的發射、接收探頭(tóu)進(jìn)行孔壁厚度測量,超聲波探頭將發射、接收超聲波(bō)產生的電(diàn)脈衝經(jīng)發(fā)射接收電(diàn)路整形後提(tí)供給數據采集卡。同時,激光位移傳感器將探頭在測量方向上的位移轉化成(chéng)電信號,由數據采集卡接收輸送給上位機。
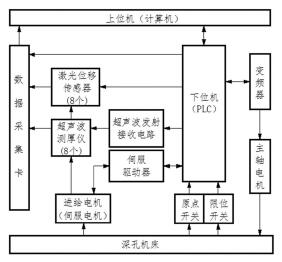
圖(tú) 6 檢測控製係(xì)統結構示意圖
PLC 作為下位機(jī)主要用於觸發超聲波發射接收電路和(hé)A / D 數據采集卡工作,進行與上(shàng)位機的數據通(tōng)訊以實現檢測控製。工控機作為上位(wèi)機,處理(lǐ)采集卡(kǎ)接收的探頭(tóu)和激光位移傳感器返回的(de)電信號,轉化(huà)成

所需要(yào)的參數,式(shì)中: S1n為第(dì) n 個方向上探頭的位移量;Un0、Un1分別為第 n 個激光位移傳感器起始電壓值和位移變化後電壓值; S、U 分別為激光位移傳(chuán)感器的(de)量程和最大量程時對應的電壓值; L1n為第 n 個方向上探頭測量的孔壁厚度;C 為超(chāo)聲波在被測工件中的傳播速度; T1n、T2n分別為第 n 個探頭發出(chū)的超聲波經孔的內、外壁反射回(huí)探頭所用的時間。
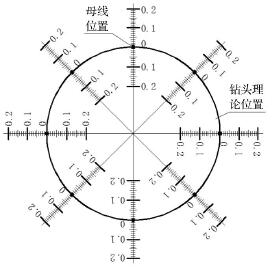
圖 7 鑽頭位置的(de)監控畫麵示意圖(tú)
為了(le)使鑽頭 8 個被測量方(fāng)向上的母線,在法向平麵上(shàng)以(yǐ)亮點的形式呈現在二維坐標監控畫麵內,如圖 7 所示,將式( 2) 、式( 3) 、式( 4) 、式( 5) 、式( 6) 整(zhěng)理後,得出 8 條母線在二維坐標(biāo)監控(kòng)畫麵內的坐標值:
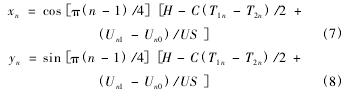
式中: xn、yn為第 n 個方向上鑽頭母線(xiàn)在法向平麵上(shàng)位置的坐標值(zhí); H 為探頭(tóu)自由伸縮狀態下,應調整的 H 高度(dù)值( 根據工件外形確定) 。由式(shì)( 7) 、式( 8) 可以看出,隻要(yào)測出 T1n、T2n、Un0、Un1的值,就可以求出母線在二維坐標監控畫麵(miàn)內的坐標值。
5 結 論
小徑深孔鑽(zuàn)削鑽頭位置檢測係統借助超聲波(bō)檢測技(jì)術和激光位移傳感器技術,通過現代(dài)電子技術(shù)和數控(kòng)技術(shù)應(yīng)用到深孔加(jiā)工過程中,與傳統檢測方法相比,具有分辨率高、響應速度(dù)快、信號處理簡單、測量精度高,避免了因被測物體外形影響產生的測量誤差,可以實時檢測鑽頭的位置情況,解決了小深孔加工過程中鑽頭位置難測量和測量(liàng)精度低的問題,降低了廢品率,有(yǒu)效提高工件小深孔的加工精度,為小(xiǎo)深(shēn)孔加工(gōng)鑽頭位置檢測提供了新技術,有良好的應用和推廣價值。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作(zuò),歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作(zuò),歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業界視點
| 更多

行業數(shù)據
| 更多
- 2024年11月 金屬切削機床產量(liàng)數據
- 2024年11月 分地(dì)區金屬切削機床產量數(shù)據
- 2024年11月 軸承出口情況
- 2024年(nián)11月 基本型乘用車(轎車)產量數據(jù)
- 2024年11月 新能源汽車產量數據
- 2024年11月 新(xīn)能源汽車銷量情況
- 2024年(nián)10月 新能源汽車產量數據
- 2024年10月 軸承出口情(qíng)況
- 2024年10月(yuè) 分地區金屬切削(xuē)機床產量數據
- 2024年10月 金屬切削機床產量數(shù)據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能(néng)源汽車產量數據(jù)
- 2028年8月 基本型乘(chéng)用車(chē)(轎車)產(chǎn)量數據(jù)
博文選萃
| 更多
- 機械加工過程圖示
- 判斷一台加工中心精(jīng)度的幾種辦(bàn)法
- 中走絲線切割機(jī)床的發展(zhǎn)趨勢
- 國產數控係統和數(shù)控機(jī)床何去何(hé)從?
- 中國的技術工人都去哪裏了?
- 機械老板做了(le)十多年,為何還(hái)是小(xiǎo)作坊?
- 機械行業最新自殺性營銷,害(hài)人害己!不倒閉(bì)才
- 製造業大逃(táo)亡
- 智能(néng)時代,少談點智造,多談點(diǎn)製造
- 現實麵前,國人沉默。製造業的(de)騰飛,要從機(jī)床
- 一文搞懂(dǒng)數控車床加工刀具補償功能
- 車床鑽孔攻螺紋加工方法及工裝設計
- 傳統鑽削與螺旋銑孔加(jiā)工工藝的區別