


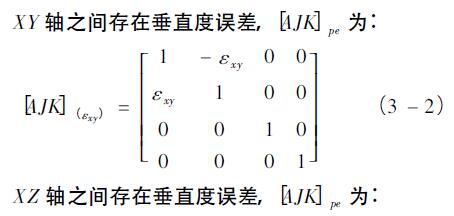
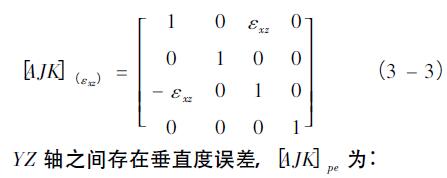
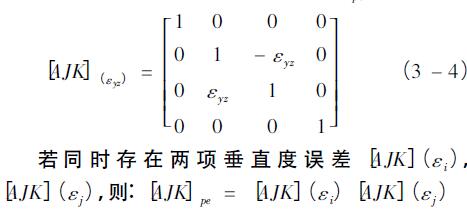
摘要: 數控機床是機械(xiè)、鋼鐵、汽車等行業的主要生產設(shè)備,而誤差也(yě)成為影響數控機床(chuáng)精密度的主(zhǔ)要因素。利用拓(tuò)撲結構來對西門子數控銑床的誤(wù)差進行建模,通過對誤差模型的(de)分析,在安(ān)裝與製造過程中對誤差項進行控製和補償,從而提高數控(kòng)銑床的加工精度。
關鍵詞: 拓撲結(jié)構(gòu); 數(shù)控銑床(chuáng); 誤差模(mó)型
1. 引言(yán)
多體係統指多個(gè)剛(gāng)體或柔體(tǐ)部件通過某種(zhǒng)方式聯(lián)結而成的複雜機(jī)械係統,是對工(gōng)程中出現的複雜工程對象的高度概括和抽象。多體係統通過概括和抽象使人更廣泛、更深刻地把握事物本質,工程應用中的機(jī)械係統都可以通過抽象和提煉成為多體係統。多體係統理論核心是其拓撲結構關聯關係的描述和運動學或動力學特征的(de)描述。
數(shù)控機床是一種典型的多體係統,可以利用多體係統理論(lùn)對機床進行誤差分析,利用拓撲結構建立運動模型進行誤差補償,提高加(jiā)工精(jīng)度。影響數控機床加工精度的誤差主要有形位誤差、熱變(biàn)形誤差、運動誤差、切削力誤差及其它誤差源。其中幾何誤差是最根本的誤差(chà)源,也(yě)是形位誤差的宏(hóng)觀體現,本文(wén)以西門子數控銑床( 如圖1) 為例,主要側重對(duì)機(jī)床(chuáng)形位誤差進行誤(wù)差(chà)建模。
2. 拓撲結(jié)構
多體係統誤差運動分析的理論(lùn)基礎(chǔ)是多體係統
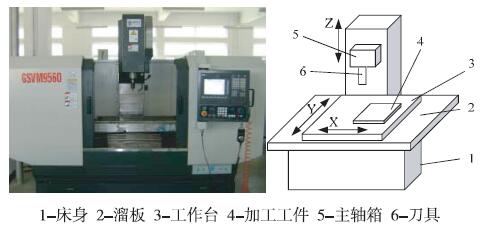
圖1 西門子( 802DSL - GSVM9560)
數控銑(xǐ)床總體(tǐ)結構圖
學運動學理(lǐ)論,基本原理是用低序體(tǐ)陣列方法描述多體係統拓撲結構的關聯關係,用4X4 階齊次(cì)方陣描述點和矢量在廣義坐標係中的變換(huàn)關係,使有誤差多(duō)體係統的運動分析變得(dé)簡單、迅速、明了和(hé)普遍適用。
在畫(huà)拓撲圖時,為每個個體編號。編號方(fāng)法: 慣性參考坐標係在床身上(shàng),則床身為B1 體; 沿遠離B1的方向按自然數增長從一(yī)個分(fèn)支到另一個分支依次標定所有物體的(de)序號,分別是: 1 床身,2溜板,3工作台,4待加(jiā)工工件,5 主軸箱,6 刀具。根據拓撲結構能夠得到誤差分支,比如圖3 中的兩(liǎng)個誤差分支為:1 - 2 - 3 - 4; 1 - 5 - 6。每(měi)個體和序號一(yī)一對(duì)應,數字大小代表了體的順序和鄰接關係。特征(zhēng)符號描述了相鄰體間的運動關係,這(zhè)樣隻用序號和特征符號就(jiù)能(néng)將一個複雜機械係統的(de)鄰接(jiē)關係和相鄰部件之間的運動關係表示清楚(chǔ)。圖2 為其拓撲結(jié)構圖; 圖3為考慮誤差的多體係(xì)統拓撲(pū)模(mó)型。
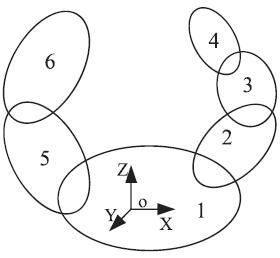
圖2 多體係統拓撲結構圖
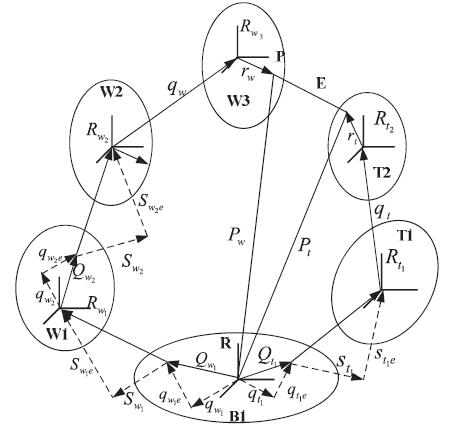
圖3 考慮誤差的數控銑床多體係統拓撲模型
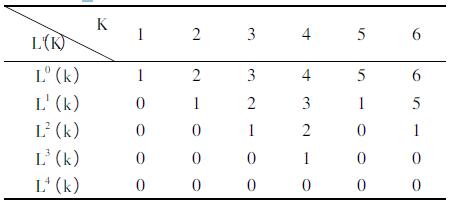
目(mù)前,描述(shù)多體係統拓(tuò)撲結構常用方法是運用低序體(tǐ)陣列。用低序陣列描述方法描述多體係統拓撲結構簡(jiǎn)單、方便,適用於計算機自動描述。表1 所示為數控銑床多體係統低序體陣列表。
表1 數控銑床多(duō)體係統低序體陣列
3. 特(tè)征矩陣
相鄰體之間的任何運動都是六種基本運動的合成,所以隻要知道每一基本運動過程產(chǎn)生的運動誤差,就能(néng)得知合成運動的運動誤差。
下麵討論典型體(tǐ)位置誤差和(hé)運動誤差參考坐標係特(tè)征變換矩陣的形成規律。
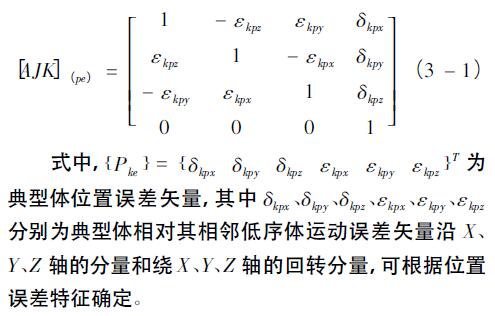
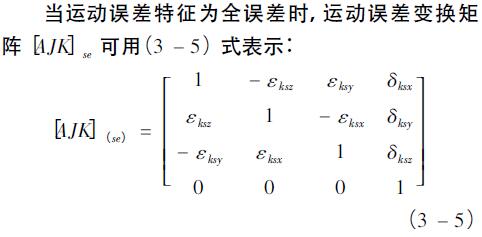
3. 1 位置誤(wù)差變換矩(jǔ)陣
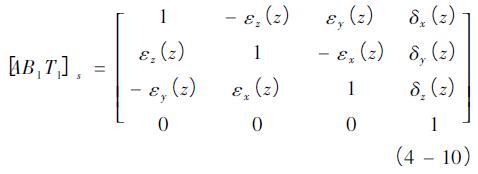
當位置誤差特征為全自由度(dù)( 六(liù)自由度) 誤差時,位置(zhì)誤差變換矩陣如( 3 - 1) 式所示(shì)。
在實際情況(kuàng)下,要首(shǒu)先確定多體(tǐ)係(xì)統特(tè)征低序體陣列,建立各典型體(tǐ)運動參考坐標係、運動坐標係、位(wèi)置誤差(chà)坐標係和運動誤差坐標係特征矩陣,即可(kě)確定多體係相鄰低序體轉(zhuǎn)換矩陣。
4. 多體(tǐ)係統相鄰體變(biàn)換矩陣
以數控銑床( 西門子802DSL - GSVM9560) 為研究對象進行誤差(chà)建模,其總體結構圖和多體係統拓撲結構圖如圖(tú)1 - 3 所示。
下麵根據(jù)4 × 4 階Denavit - Hartenberg 變換矩陣列出各相鄰體變(biàn)換矩陣( 未寫出的(de)為單位矩陣) :
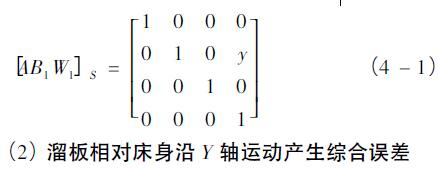
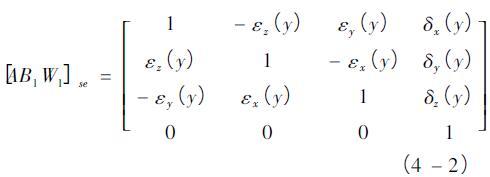
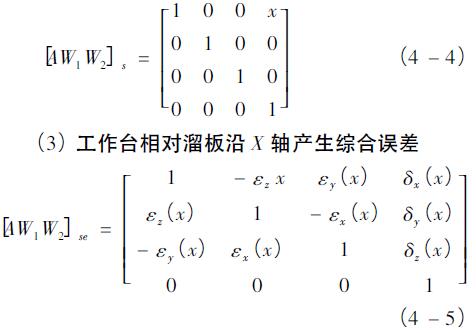
4. 1 溜板與床身
( 1) 溜板相對床身沿(yán)Y 軸移(yí)動距(jù)離y
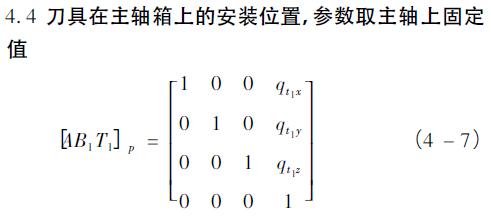

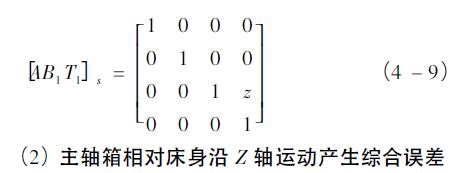
4. 6 主軸箱(xiāng)與床身
( 1) 主軸箱相對床(chuáng)身沿X 軸移動距離z
以上在設立數控銑(xǐ)床加工(gōng)係統(tǒng)中各體的坐(zuò)標係時,沒有考慮(lǜ)載荷變形(xíng)和熱(rè)變形對體間位置(zhì)和位移誤差(chà)的影響,所以在求取相(xiàng)鄰體間變換矩陣時,忽略了大部分由裝(zhuāng)配引起的位置誤差,而其它各(gè)項(xiàng)位置和位移(yí)誤差參數都是空間位置的函數,一經確立,就(jiù)不再隨時間和載荷的變化而變化。
5. 結(jié)論
基於多體係統理論的拓撲結構誤差分析建模方法由於具有很強的概括性、通用(yòng)性(xìng)和(hé)係統性,己在航天器、機器人、工(gōng)程機械等(děng)領域得到(dào)應用(yòng),並在數控機床誤差分析、建模(mó)和誤差補償的軟件實現中顯示出其獨特的優越性(xìng),對確立數控機床的通用性和動(dòng)態建模(mó)方法有(yǒu)顯著的理論指導意(yì)義及工程實踐(jiàn)價值。
如果您有機床(chuáng)行業、企(qǐ)業相關新聞稿件發表,或進行(háng)資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com

調查")
- 2024年11月 金屬切削機(jī)床產量數據
- 2024年11月 分地區(qū)金屬(shǔ)切削(xuē)機床產量數據
- 2024年11月 軸(zhóu)承出口情況(kuàng)
- 2024年11月 基本型乘(chéng)用車(轎(jiào)車)產量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新(xīn)能源汽車銷量情況(kuàng)
- 2024年10月 新能(néng)源汽車產(chǎn)量數據(jù)
- 2024年(nián)10月 軸承出口(kǒu)情況
- 2024年10月 分地區金屬切削機床產量數據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源(yuán)汽車銷量情況
- 2024年8月 新能源(yuán)汽車產量數據
- 2028年8月 基本型乘用車(轎車)產量數據