


摘要: Heavy cut 225 數控鏜銑床在加工時(shí)隨機發(fā)生挖刀故障。通過分析發現,工件(jiàn)原點坐標變化是(shì)導致(zhì)挖刀故障的主要原(yuán)因。針對該故障原因,給出了具(jù)體的處理方法,徹底排除了(le)故障(zhàng)。
關鍵詞: Heavy cut 225 數控鏜銑床; 挖(wā)刀故障; 故障排除
Heavy cut 225 數控鏜銑床( 見圖1) 為捷克產進口設備,主要包括1 個主軸(zhóu)和4 個進給軸(zhóu),主軸采用直流電機和西門子6RA70 直(zhí)流調速裝置,數控與手動雙控製方式; 進給軸用西門子840C 配(pèi)611D 伺服裝置驅動西(xī)門子(zǐ)1FT6 係列伺服電機控製,其中X、Y、Z 均采用用閉環控製,W 軸采用半閉(bì)環控製; 用西門子S5 可編程控製器來實(shí)現過(guò)程控製。通(tōng)過(guò)PROFIBUS-DP 現(xiàn)場(chǎng)總線進行PLC 與傳動裝置之間的數據交換。
圖1 機床模型
該設備為某公司(sī)生產某些重要部件的(de)指定設備,因此對其可靠性(xìng)要求非常高。然而在生產的過程中突發隨機性故障,X、Y、Z 三個(gè)坐標軸分別發生了挖刀現象,挖刀深度達到十幾個甚至幾十個毫米不等,對該公司造成了極大的損失。
1、 故障(zhàng)分析與處理
1. 1 故障(zhàng)說明
設備開機並沒有任(rèn)何故障報警能正常(cháng)運行及加工,故障發生前機床往往會出現突發的劇烈抖動,後數控係統出(chū)現報警,按下緊急停止按鈕,再按(àn)複位鍵報警可被消(xiāo)除,運行動作(zuò)正常,返回機床參考(kǎo)點後,再按照加工程序走到工(gōng)件原點開始加工,隨後發生挖刀故障。
1. 2 故障原因分析
第一步分(fèn)析和尋找到故障發生的主要點和其(qí)他相關點,縮小(xiǎo)故障源的查找範圍。
首(shǒu)先把故障發生到(dào)出現挖刀(dāo)的過程分成兩個(gè)時間段來分別考慮: 第一段,機床劇烈抖動,機床出現可複位的報警; 第二段,返回機床參(cān)考點後開到工件參考點加工。
由於故障發生時,操作者都是采用先按複位鍵的方式,因此當時的機床報警是什麽,無法準確判斷,但一般而言,硬(yìng)件損壞(huài)之類的報警是無(wú)法采用複位進行消除的,另一方麵就現象來看導致機床劇烈抖動,可能與帶上(shàng)負載後電機所輸出的扭矩突(tū)然不足有關係。這台采用的是(shì)西門子840C 數控係統配611D 伺服裝置,與840D 配611D 伺服裝置的情況略有(yǒu)不同,就是840C 數控係統配611D 伺服裝置時數控部分多(duō)了幾塊軸卡,即數控(kòng)發出(chū)的指令先發送給軸卡,再通(tōng)過設備總線傳送(sòng)到611D 伺服裝置控製電機進給。所以對整個(gè)環節之間的連線進行了排查,確保其屏蔽狀況良好、插接可靠,並對數控部分(fèn)進行了除塵。但(dàn)這一段可能(néng)並不是發生挖(wā)刀故(gù)障的最主(zhǔ)要的原(yuán)因,因此(cǐ)開始分析第二段。在第二段裏,因(yīn)為出現劇烈抖動,操作者按下了急停,再複位消除故障,機床返回了機床參考點,再根據程序返回工件原點(diǎn)開始加工,作者再把這個(gè)過程,分成單步執行,機床回機床參考點後再開到開始設置的工件原點,發現工件原點的坐(zuò)標已經不(bú)在機床程序(xù)定義的工件原點的坐標處,出現了一定的偏移量。工件原點(diǎn)坐標出現了變化也就是說後麵所有自動程序的基(jī)準偏移了,從而導致故障的發生。這應該就是產生挖刀故障的主要原因。
1. 3 故障處理
找到故障的發生段後,開始進行逐項分析,查找(zhǎo)故障的原因。
首先由於3 個坐標(biāo)全部是位移故障(zhàng),並且全部是全(quán)閉環控製的軸,那麽引起故障的主要因素應(yīng)該是位置環部分,位置環板沒有任何報警,且故障(zhàng)隨機發生,因此基本排除(chú)位置環板硬件損壞的可能性。引起故障的第一順位鎖定在光柵尺。
分別打開X、Y、Z 軸護蓋(gài),對每一個軸的光柵尺進行檢(jiǎn)查(chá),發現(xiàn)X 軸光柵尺盒下麵有(yǒu)油膜,那麽X軸尺子存在被汙染的可能性,需對尺子進行清洗; Z軸的讀數頭上有非(fēi)常多的鋁屑,從而判斷Z 軸的光柵尺安裝存在問(wèn)題,讀數頭與尺盒摩擦導致尺盒(hé)脫落出鋁屑對尺子造成了一(yī)定的汙染。因此首先用拔尺(chǐ)器將尺子抽出采用無水酒精和絲綢清洗後,逐一檢查(chá)尺麵確(què)定無傷痕後再放入光柵尺收納盒內; 第二步,對(duì)尺(chǐ)盒進行處理,由於尺盒內壁已經摩擦出毛刺,因此先使用極(jí)細水砂紙對毛刺部分(fèn)進行打磨處理,再用無水(shuǐ)酒精反複衝刷尺盒,將裏麵的鋁屑徹底清理幹淨,再將尺子按要求回裝尺(chǐ)盒與讀數頭。
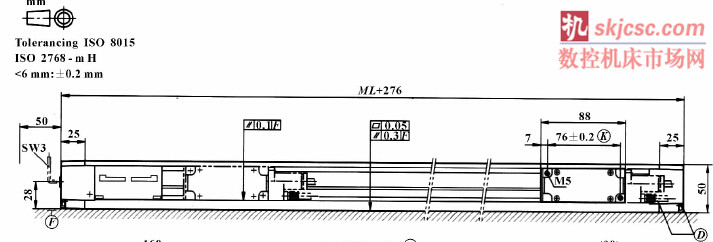
安裝時(shí)必須按照(zhào)要求( 見圖2) ,特別(bié)是讀數(shù)頭的安裝需要特別注意,否則可能還會導致其他(tā)故障的發生(shēng)。
![]()
圖2 光柵尺安裝圖
接下來是(shì)Y 軸。Y 軸為(wéi)垂直軸,其(qí)光(guāng)柵尺安裝(zhuāng)沒有問題,采用激(jī)光幹涉儀對尺子精度進行了檢查,尺子精度良好。所以決定通過分析回機床參考點的過程(chéng)來查(chá)找原(yuán)因。
機(jī)床回參考點的過(guò)程是: 該坐標軸為負方向回參考點,在接收(shōu)到回參考點指令以(yǐ)後,首先從當前點開始按照(zhào)參數MD34020 ( REFP-VELO-SEARCH-CAM)尋找參考點開關,找到參考點開關後再(zài)根據參數MD34040 ( REFP-VELO-SEARCH-MARKER) 尋找第一個零脈衝信號,找到第(dì)一個零脈衝信號後再根據參數MD34080 找到機(jī)床參考點。
作者采用(yòng)的是海德漢LB302C 係列的光(guāng)柵尺,該係列(liè)尺子(zǐ)是每50 mm 就分布了一個零脈衝信號點,而非以前的隻有一個零脈衝(chōng)磁片的形式。作者使用的機床參考點減速開關采用(yòng)的是外部(bù)硬限位,該(gāi)限位(wèi)的撞塊為梯形(xíng)。
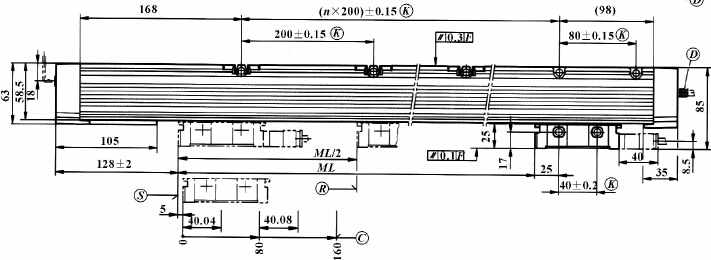
在這台設(shè)備的數控軸回參考點的全過程中,尋找(zhǎo)參(cān)考(kǎo)點的速度、零脈衝信號、尋找零脈衝信號的速度、返回參考點的距離等環節都是相對比較精確的(de),而尋找(zhǎo)第一個零脈衝信號指(zhǐ)令的激活點是整個過程中相對不準(zhǔn)確(què)的環節。由於它采用的(de)是(shì)外部硬(yìng)限位的方式,隨著(zhe)使用(yòng)時間的增長,元器件的老(lǎo)化(huà),尋找零脈衝觸(chù)發信號的發出每次(cì)都可(kě)能存在(zài)細微的差異。而作者現在采用(yòng)的LB302C 係列光柵尺具有每50 mm 分布一個零脈衝信號的特性,那麽尋找零脈衝觸發信號發(fā)出點(diǎn)的位置與光柵(shān)尺零(líng)脈衝信號點的相對(duì)位置可能直接導致參考點偏差一個零脈衝間隔距離。從數據分析上作者推測,目(mù)前光柵尺的其中一個零脈衝點( 點A) 的位置剛好在尋找零脈(mò)衝觸發(fā)信號發出點的偏差範圍(wéi)內,這就導致兩種(zhǒng)情況發生:第一(yī)種( 如圖3) ,尋找零脈衝觸發信號在點(diǎn)A前發出,那麽找的第一(yī)個零脈衝信號就是點A,找到X1這個參(cān)考點。
圖3 脈衝觸發(fā)模型圖1
第二種( 如(rú)圖4) ,尋(xún)找零脈衝觸發信號在點(diǎn)A後發出,那麽找的第一個零脈衝信號就變成了點(diǎn)B,找到的參考點成了X2了。
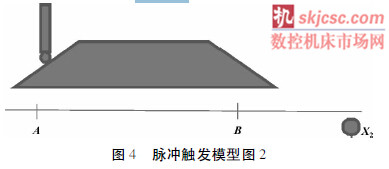
根據以上分析,這就是造成(chéng)參考點偏移的主要原因。作者(zhě)將撞塊移動了一個距離,使其空間位置如圖5 所示。
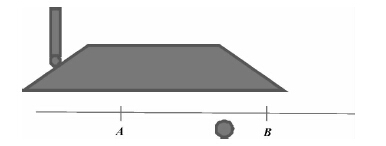
圖5 脈衝觸發模型圖3
運行後發現(xiàn)每(měi)次(cì)斷電後再開啟時,原點坐標(biāo)向下掉了1 ~ 2 mm。通過觀察發現(xiàn),由(yóu)於Y 軸為垂直軸,其電機帶有(yǒu)抱匝(zā),上電時抱匝打開上電(diàn)機使能,電機靠使能被鎖住,掉電時(shí)斷開電機使能(néng)並合上抱(bào)匝,查看PLC 程序,發現抱匝與使能的上電和掉電指令是同步發出的,但實際上電機抱匝要完全打開和(hé)關閉是需要一定的時間的,而使能的(de)上電和掉電卻是非常迅速的,兩者實際(jì)上的不同步以及Y 軸方向的自重很大,使得在(zài)軸使能已經關閉而抱匝(zā)還沒有完全閉合的那一瞬間,由於自重很大導(dǎo)致其下滑1 ~ 2 mm,就是(shì)造成該現象的主要原因。針對這個分析,對PLC 程序進行了修(xiū)改,改變抱匝與使能的掉電時序,讓掉電時先抱匝掉電,先讓抱匝把(bǎ)電機鎖(suǒ)住再關閉電機(jī)使(shǐ)能,這樣徹底(dǐ)解決了掉電(diàn)時由於自(zì)重而下滑的問題。到(dào)此故障已經全部消除。
2 、結論(lùn)
( 1) 相近的故障現象,可能(néng)由不同的因素導(dǎo)致,要(yào)善於從(cóng)相同中找出不(bú)同的因素,逐一排查。
( 2) 在修理和改造設備的時候,有時會忽略某些電氣部件的安裝細節(jiē)的重要性,但這些細節引起的故障往往不是立刻體現在設備上,而是通過較長(zhǎng)時間的累積才發生的,而一旦(dàn)發生(shēng)可能引起的經(jīng)濟損失將更大。所以在今(jīn)後的修理過程中應該引起重視。
( 3) 有的時候故障可能不僅僅是一個因素造(zào)成(chéng)的,而是多個因素的集中表現。
如果您有機床(chuáng)行業、企業相關新(xīn)聞稿件發(fā)表,或進行資訊合作,歡(huān)迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
金馬(mǎ)")

- 2024年(nián)11月 金屬切削機床產量數據
- 2024年11月 分地區金屬(shǔ)切削機床產量數據
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用(yòng)車(轎車)產量數據
- 2024年11月 新能源汽車產(chǎn)量數據
- 2024年11月 新能源(yuán)汽(qì)車銷(xiāo)量情況
- 2024年10月 新能源汽車產量數據
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切削機床產量數據
- 2024年10月 金屬切削機床產量(liàng)數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本型乘用車(轎車(chē))產量數據