


激光加工(gōng)即是利用激光作(zuò)為能量,將材料熔(róng)化而後(hòu)成型的(de)一種加工方法。按加工的目的,可(kě)以(yǐ)分為(wéi)激光切割、激光打標、激光焊(hàn)接、激光熔敷(fū)、激光增材製造等。激光的溫度可達到(dào)6000°,作用於材料能瞬間將材料熔化甚至氣化。作為典型的熱加(jiā)工,以熱影響區小、加(jiā)工速度(dù)快,成型後無需後續(xù)加工而著稱,特別適合於薄板或受(shòu)熱容易變(biàn)形的材料。考慮(lǜ)到激光的安全性,以及激光(guāng)加工的高效性,激光加工通常采用自動化輔助生產,能高效(xiào)完成加工任(rèn)務。
激光加(jiā)工的基礎是激光加工(gōng)係統,武漢法利萊的(de)萬瓦加(jiā)工(gōng)係統,集激光切(qiē)割、焊接、熔敷、掃描焊一體,是激光加工係統(tǒng)的集大成者。
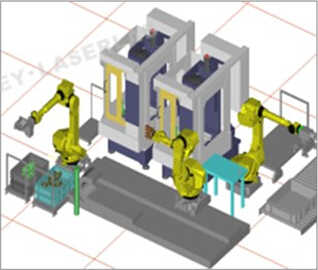
一套完(wán)整的激光加工係統包括激光器(含光纖、冷水機和穩壓(yā)電源)、激光頭、運動機構(機(jī)器人或機床)、工作平台、其他輔助裝備(工控機、冷幹機、輔助水氣等)。以下簡要介(jiè)紹激光器、激光頭和運動機構等(děng)三部分。
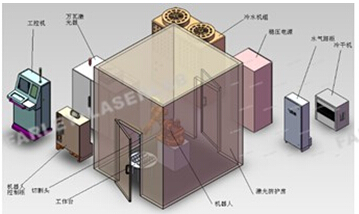

圖1 激光加工係(xì)統模型(上)和萬瓦激(jī)光器(下)
激光器是激光加工的核心,目前(qián),主要采用光纖激光器,其(qí)光束質量好,電光轉化效率高,免(miǎn)維護,適合於各種材料加工。
目前主流的激光器有CO2激光器、光纖激光器、半導體激光器、碟片(piàn)激光器等。
方向單(dān)一是激光的主要特性,基於這一點,可以通過光學傳輸輸出不(bú)同大小的光斑,從而適用不(bú)同的加工(gōng)。另外,激光能量集(jí)中,使得(dé)激光的穿透能力強,適用於厚板的加工。
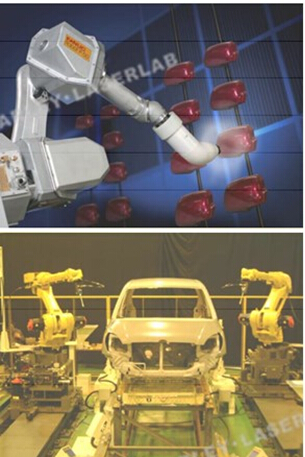
激(jī)光加工係統適應於加工件結構特點的運(yùn)動機械構成其運動(dòng)機構,通常采用機床加工,目前主流的加工手段是機床(chuáng)加工,其加工(gōng)精度高(gāo),穩定性好,主要應用(yòng)於二維加工,包括激光(guāng)打標、激光切割、激(jī)光熔敷;采用機械手臂,柔性好,易於實現三維加工,包括三維激光切割,激光焊接等;加工精度比機床(chuáng)精度(dù)差(chà),靈活(huó)性更佳,占地麵積相對較小(xiǎo)。

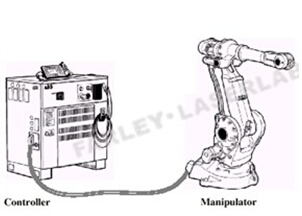
圖2 機床(上(shàng))和機器人(下)
激光(guāng)頭是激光加工輸出(chū)光能量的終端機構,通過光學鏡(jìng)片組(zǔ)合,先將激光擴束(shù),然後(hòu)通過(guò)光學(xué)鏡(jìng)片將激光放大的過程。按照(zhào)激光加工的(de)功能,可分為激光(guāng)切割頭(tóu),激光焊接頭,激光熔敷頭,掃描激光頭,激光打標頭等。
普通的激光切割頭,附帶吹氣嘴,采用高壓能將激光熔化的材料(liào)吹除,從而形成切縫。目前汽(qì)車廠主流使(shǐ)用的激(jī)光釺焊頭,其附帶激光自動聚(jù)集功能,從而更(gèng)加(jiā)有利於激光加工(gōng)的(de)穩定性。掃描激光頭,能利用(yòng)鏡片角度的(de)轉動和位置(zhì)的移動,保證激光作用於工件的光斑大小(xiǎo)不變,而且通過精(jīng)確(què)的控製,在(zài)激光頭姿態不改變的前提下,能夠實現圓形,直線段,C型等結構的焊縫結構。
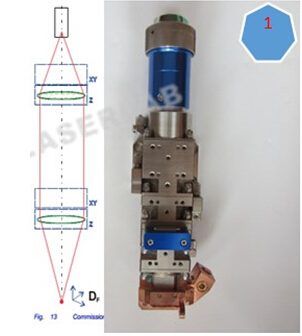
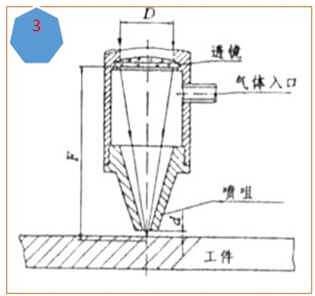

1 激光焊接(jiē)頭;2 激光釺焊(hàn)頭;3 激光切割頭;4 激光掃描焊接頭光束原理
圖3 各種激光加工頭
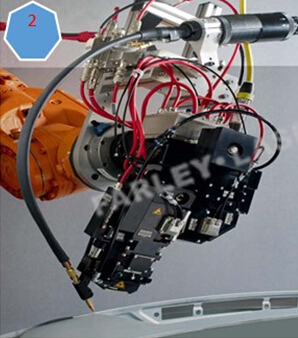
激光(guāng)加(jiā)工應(yīng)用效果如下所示

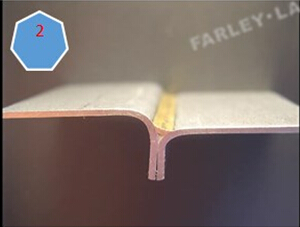
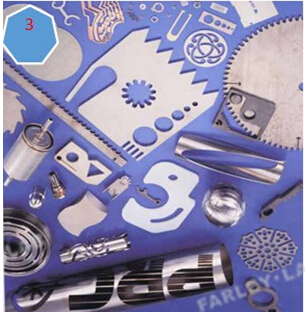

1 激光打標;2 激光釺焊;3 激光切割;4 激光增材製造
圖4 激光加工效果圖
機器人應用
蒸氣機的發明,部(bù)分的解放了人類(lèi)的雙(shuāng)手,使得工業革命變成一種可能;發電機的發明(míng),電(diàn)力代替人手(shǒu)工勞作得到普及;計(jì)算機等的發明,給機械安裝大腦,帶來機械運行速度的極大提升(shēng);未來智能工廠的普及,將使得製造不再以標準化的產品為準,而將以人的個性(xìng)化需求為基礎,通過智能控製整個產業(yè)鏈,極大的滿足個性化需(xū)求,而且能有效的提升產品的生產(chǎn)效率。機器人的應用,是通向智能製造的一個基礎。
目前,主流的機器人廠家有德國KUKA,日本的(de)FUNAC,瑞典的(de)ABB,國內有首鋼的莫托曼(màn)和沈陽新鬆機器人。機器人主要有兩部分組成,包括硬件(主(zhǔ)要是指機器人的機械手臂,包括減速機、編碼(mǎ)器等)和軟件(機器人本(běn)體的(de)控(kòng)製(zhì)器(qì))。
工業機器人有以下(xià)三大功能:
1、運動功能(在可達空間內任意點的運動到(dào)達);
2、信(xìn)號交換及功能實現(與其他設備進行信號交換,控(kòng)製其他設備(bèi)的開啟(qǐ)和關閉,或被PLC控製與其他設備一起實現功(gōng)能);
3、仿真(zhēn)及軌跡模擬(圖5如示,通過仿真及軌跡模(mó)擬,研究機器人(rén)軌跡的可達性、CT循環時間等)。

圖(tú)5 機器人模(mó)擬(上(shàng))及機器人軸數(下)
關於機器人的選型,考慮以下問(wèn)題:
1、品牌及定價;
2、負載:機器人六軸負載重量和轉動慣量;
3、軸數:機器手臂的軸數量(如(rú)圖5右所示(shì));
4、行程:機器人所能達到的最大路徑區間;
5、精度:達(dá)到某位置點的精度(dù)和重複運動的定(dìng)位精(jīng)度;
6、安裝方式:水平或倒置;
機器人的主要應(yīng)用如下:點焊、搬運、噴塗、切割、塗膠(如圖6)等(děng);



1 點焊;2 搬運; 3 噴(pēn)塗;4 塗膠;5 切割
圖6 機器人應用
機器人視覺
機器人視覺(如圖7)是使機器人具有視覺感知功能的係統,是機器人係統組成的重要(yào)部分之一。機器人視覺可以通過(guò)視(shì)覺傳感器獲取(qǔ)環境的二維圖像(xiàng),並通過視覺處理器(qì)進行(háng)分析和解釋,進而轉換為符號,讓機器人能夠辨識物體,並確定其位置。機器人視覺硬件(jiàn)主要(yào)包括圖像獲取和視覺處(chù)理兩部分,而圖像獲取由照明係統、視覺傳感器、模擬-數字轉換器和幀存儲器(qì)等組成。根據功能不同,機器(qì)人視覺可分(fèn)為視覺檢驗和視覺引導兩種,廣泛應用(yòng)於電子、汽車、機械(xiè)等工業部門和醫學(xué)、軍事領域。汽車行業中,經常用機器人(rén)視覺來讀取車(chē)輛類型、測量車身的尺寸。
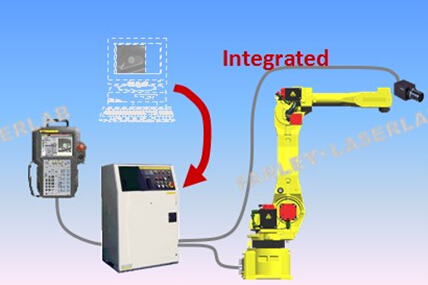
圖7 機器(qì)人(rén)應用
如果您有機(jī)床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯(lián)係本(běn)網編輯部, 郵(yóu)箱:skjcsc@vip.sina.com
州金馬")

- 2024年11月(yuè) 金屬切(qiē)削機床產量數據
- 2024年11月 分地區金屬切削機床產量數據
- 2024年11月 軸承出口情(qíng)況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源汽車銷量情況(kuàng)
- 2024年10月 新能源(yuán)汽車產量數據
- 2024年10月 軸承出口(kǒu)情況
- 2024年10月 分地(dì)區金屬切削機床產量數據
- 2024年10月 金(jīn)屬切削(xuē)機床(chuáng)產(chǎn)量數(shù)據
- 2024年9月 新能源汽(qì)車銷(xiāo)量情(qíng)況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本型乘用車(chē)(轎車)產量數據