州數控")



基於Vericut的數控(kòng)係統開發與設計
2016-9-5 來(lái)源:興天(tiān)通訊技術有限公司工程部 作者:楊廣澤
摘要:針對當前市場中計算機數控係統軟硬件(jiàn)多為專用,易出(chū)現各(gè)廠家設備之間互不兼容的問(wèn)題(tí),文中提出了基於Vericut可滿足現代(dài)製造業(yè)向智能化和(hé)網絡化方向發(fā)展需要的數(shù)控係統軟件開發與設計。本軟件係統在以PMAC為核心運動控製器的基(jī)礎上(shàng),通過Vericut荻取機床加工工件的NC參數,以VS2005為開發(fā)環境,設計出了一種能滿足目前多種不(bú)同型(xíng)號機床(chuáng)兼容(róng)性較高的開放式數(shù)控軟件平台(tái)。通(tōng)過具實(shí)驗證明,軟件具有較好的應(yīng)用前景,彌(mí)補了當前不同設備操作係統不兼容的(de)問題。
關鍵詞:開放式數控(kòng)係統(tǒng);PMAC;NC程序(xù);刀位文件
隨著計算機技術和製造工藝技術水(shuǐ)平的不斷發展,現代加工製造裝備業對數控係統加工(gōng)精度、響應時間和工(gōng)作效率等方(fāng)麵的要求不斷提高,但(dàn)各廠商所屬設(shè)備的專用計算機數字化控製係統(Computerized Nu.merical Control,簡稱CNC)之間互不兼容的難題日益顯現¨‘2 J,主要表現(xiàn)為各控製係統間互連能力薄弱,無法滿足係(xì)統的集成化(huà)發展趨勢,操作界(jiè)麵風格迥異及(jí)大量專(zhuān)用軟件的使用導致用戶在不(bú)同設備之間的切換帶來不便p“o,不同廠商設備係統的獨立(lì)性使得係統軟件不能滿足當前環境對開放式係統發展的要求,使係統供應商在一定程度上製(zhì)約了設備(bèi)製造商的發(fā)展,導致設備製造者(zhě)無法將(jiāng)自身特有的工藝經(jīng)驗融入到設備的控製係統,無法形成具有設備製造(zào)商自身特色的產品(pǐn)¨。8 J,這將嚴重阻礙數控設備控(kòng)製係統的發展。通過PC機開發,開放式數控係統已成為數控(kòng)係統技術發展的主流技術。
本文設計(jì)的(de)係統主要目的在於提高數控係統的模塊化以及通用性,降低了複(fù)雜機床建模的難度,增強了NC代碼的可修改性及其(qí)正確性,並減少了工件試切和(hé)可能發生碰撞所造成的成本與風險。
1、總體設計
通常數控加工過程(chéng)主要包括對圖樣進(jìn)行分析,確(què)定需要數控加工的部分;並利用圖形軟件對所需加工的部分進行幾何造型(xíng);根據加工條件,選擇(zé)合適的加工參數,生成刀具軌跡,最終進行仿真檢驗,生(shēng)成NC程序並傳給機床。本文設計的數控係統軟件結構,如圖l所示。結合HC一(yī)80開發(fā)過(guò)程,本軟件開發過程主要包括:軟件模(mó)塊功(gōng)能與設計,實現(xiàn)PC與(yǔ)PMAC通訊,用戶界麵的設計,自動編程模塊的編碼(mǎ)實現與調試,應(yīng)用軟件的集成、調(diào)試與運行等。
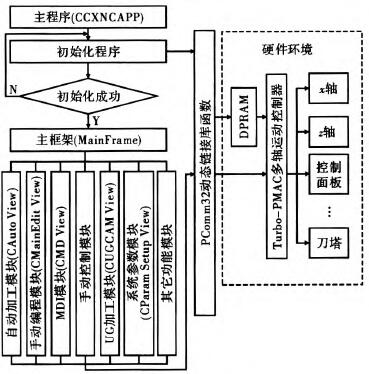
圖1 係統總體結構(gòu)圖
2、數控係統軟件設計
數控(kòng)係統軟件設計分為上位機和下位機兩部分(fèn),其中上位機掌控軟件的整體布局,包括運行(háng)界麵和人機交互等功能,下位機主要(yào)實現機床加工的伺(sì)服控製過程。其間通過動態鏈接(jiē)庫(kù)實現通訊,前(qián)者通過調(diào)用後者的程序完(wán)成控製功能。
2.1主結構設計
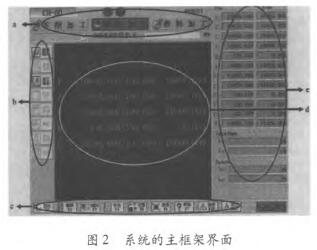
軟件平台係統的主體結構設計分布如圖2所示。從作用和需要負(fù)責的主要性能上可將主窗(chuāng)口區劃(huá)分為主題欄區、公共菜單區、速度等顯示(shì)區、視圖菜(cài)單區和(hé)視圖主(zhǔ)界麵區5部分。
(1)主標(biāo)題欄區。選擇將要進行的操作,對於已選定的模塊,標題欄會(huì)出現相應的高亮顯示,還可(kě)根據(jù)當(dāng)前加工進程觀察各軸的運(yùn)動情況;(2)視圖菜單區;(3)公共菜單區(qū)。視(shì)圖菜單區將出現不同的按鈕圖標隨著公共菜單區圖標按鈕選擇的不(bú)同;(4)視圖主界麵區。用戶可根據視圖主界麵區的內容詳細完整地(dì)了解各個模塊的運行情況;(5)位置速度顯示區。用(yòng)戶可根據此區提供的信息了解各(gè)種正在加工的道(dào)具運行情況(kuàng),包括(kuò)進給量和主刀轉(zhuǎn)速,同時(shí)用(yòng)戶還可根據上述信息實時調整加工進度,提高加(jiā)工精度和效率。
2.2上位機PC與PMAC間的通訊
由於單片(piàn)機成本低、集成度高(gāo)、使(shǐ)用方便,已在自動化設備的運動(dòng)控製中廣泛應用(yòng),但受其性能限製,難以控製3軸以上的設備;PLC工作可靠(kào)、控製的I/O點數多,但控製2個電機進行插補運動困(kùn)難(nán),控製多軸設備時(shí),運動控製器的成本(běn)較高。
PMAC其性價比高,尤其是軟件功能強大,其的應用使自動化(huà)設備控製係統(tǒng)的性能大(dà)幅提高、研(yán)發周期明顯縮短,在編寫指標過程中,可能需要使用另(lìng)一個(gè)指(zhǐ)標特定的某些值,尤其是幾個策略或指標均要用到這些值時,若按(àn)照一般寫法,需每個策略或指標均重新編寫。為節省(shěng)空間,減少重複工作,金字塔提供了模塊化編(biān)程(chéng),可將使用頻率較高的某些特定值集中(zhōng)在(zài)一個公用的(de)模(mó)塊內,PMAC 2A—PC/104運動控製卡(kǎ)的主要性(xìng)能,其運動控製卡采用標準的嵌入式PC/104計算機結構,尺寸(cùn)小巧、係統(tǒng)擴展方便。其主(zhǔ)板采用Motorola56300係列DSP作為其CPU,主頻(pín)為40 MHz。有(yǒu)128 kB SRAM、512 kB閃存。可控製4—8軸各類電機,如:步進電機、交流伺服電(diàn)機、直流伺服電機等。主(zhǔ)板上有4個電機接口和一個RS一232接口,其外觀令4個電機需要接在電機(jī)接口擴展板ACC一1P上,其是用104總線插座和主板相連接,每個電機接口均提供1個12位的±10 V模擬控製(zhì)信號;l組脈衝和方向控(kòng)製信號;3個PWM控製信號;3個編碼器輸入信號;4個輸入2個輸出開關信號,用於限位、回零、使能控(kòng)製,也可定義為通用I/0。具有先(xiān)進的PID及前饋伺(sì)服控(kòng)製算法(fǎ),且(qiě)帶有(yǒu)陷波濾波器(qì),能有效(xiào)限製(zhì)設備振動的問題(tí)。
PMAC運動控製卡具有類似與BASIC形式的PMAC編程語言,用該語言編程,可使控(kòng)製卡獨立工作,還提供了運動控製軟(ruǎn)件的動態連接庫,使用戶能方便的在VB、VC下編寫自(zì)身的軟件,控(kòng)製PMAC運動控製卡,PMAC編程語言(yán)可執行數控(kòng)機床的程序,其將G、M、r和D代碼作為子程序來調用,使得軟件編寫格(gé)式和數控(kòng)程序相同,用戶(hù)易於接受。當程序中遇(yù)到G{data}時,其將調用運動程序lOnO中(zhōng)的第(dì)m×1000行命令,其中凡是data的百位數,m是data的個位數和十位數。
2.3自動(dòng)編程模塊的實現
根據各關節的變量q。、q:、Z,值,用(yòng)運動學方(fāng)程(1)可(kě)計算出機器人末(mò)端點在工作站坐標係的位置。但若要進行機(jī)器人末端(duān)點的軌跡控製,必須進(jìn)行運動學反解,即根據點(diǎn)P。(凰,y0,Z。)計算各關節的變量、q:、Z,值,反解算法較(jiào)多,但由於(yú)兩個旋轉關節的關係簡單,可(kě)直接用幾何(hé)法進行運動學反解。用餘(yú)弦公(gōng)式的關係可得到,由於PMAC運(yùn)動控製卡允許定義2個直角坐標係:x、y、z和u、y、形以及3個旋轉坐標A、B、C,文中定義了(le)3個虛擬軸x、y、z,用G代碼計(jì)算點(diǎn)膠軌跡,不斷在內存中讀取每步運動的坐標(M,N,Zo);然後用運動(dòng)學反解公式計算出相應的g,、92、乙,進而控製3個關運(yùn)動,實現SCARA機器人的軌跡(jì)控製。對於多軸機器人(rén)和多軸(zhóu)自(zì)動(dòng)化設備,其運動軌跡(jì)計算複雜,可充分利用PMAC編程(chéng)語言具有的矩陣運(yùn)算功能,在高速運動停止過程中會出現振動現象,根據Vericut軟件獲得加工參(cān)數的主要過程包括虛擬數控機床建模,毛坯和夾(jiá)具建模,而刀具建模根據不同機床所使用的不同加工程序建立(lì)特定的主(zhǔ)刀具庫。設置係數參數,主要包(bāo)括工件編(biān)程原點和道具補償兩個方麵。流程(chéng)圖如圖3所(suǒ)示。
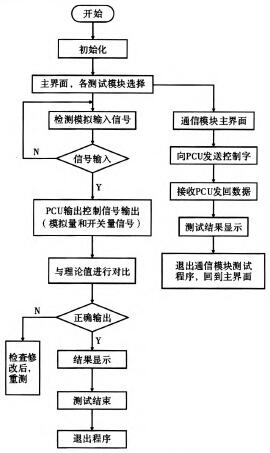
圖3軟件(jiàn)設計的流程圖
3、數控(kòng)係統軟件性能測試(shì)
首先將工件在UG模塊中進行加工(gōng),根據在UG模塊中獲取的參數,包括刀具參數信息和主(zhǔ)軸(zhóu)的運(yùn)動過程,然後將刀(dāo)具信息導人VS2005的後開發處理模塊,經轉換後(hòu)生成對應於實驗機床能識別的(de)數控程(chéng)序代(dài)碼段,最終通過對加工(gōng)成型後工(gōng)件尺寸進行測量,修正部分參數來實現加工過程誤差量的最小化(huà),根據最終(zhōng)的測量數據評判所設計的數控軟件功能的正確性。移植UG的刀具信(xìn)息而最終獲得工件加工過程,如圖4所示,通過實際應用發現,該數控係統(tǒng)軟件實現的(de)加工是準(zhǔn)確且穩定可靠的,同時節省了(le)人力物力,降低了加(jiā)工成本,提高了工作(zuò)效率。
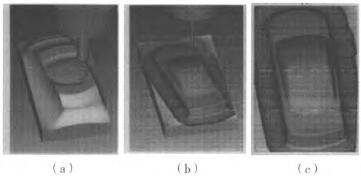
圖4測試界麵圖(tú)
4、結束語
開放式軟件平台具(jù)有良好的開放性和互操作性、可互(hù)換(huàn)性、可(kě)移植性、友(yǒu)好的人機界麵以及良好(hǎo)的係統柔性和(hé)性價(jià)比高等特點。本文(wén)設計並開發的基於Vericut的數控係統的目的是為用戶提供一個開放式的軟件平台,通過係統軟件(jiàn)的標準化(huà)後可使大量用戶通過該平台上(shàng)規定的設計步驟簡化係統設計過程和刀具走(zǒu)刀過程的基本模塊及(jí)流程,實現硬件和軟件結構的自主控(kòng)製,且允許與任何第三方(fāng)的技術或(huò)產品進行集成。本文通過Vericut軟件獲(huò)取零件(jiàn)加工過程的NC文(wén)件,在VS2005平台上根據NC文件實現了自動編程的目的。加工後,得到的結果與通過UG軟件得到的工(gōng)件造型基本相同,證明VS2005開發的(de)自動編程模塊的正確性,其(qí)可代替UG處理過程複雜的加工器件和過(guò)程,獲取能被當前機床識別的NC代碼,本文所設計的開(kāi)放式(shì)數控軟件(jiàn)控製係統可用於實際加工。
參考(kǎo)文獻
[1] 任玉田,焦振學.機床與計(jì)算機(jī)數控技術[M].2版.北京:北京理工大學出版(bǎn)社,2002.
[2]林奕鴻(hóng).機床數控技術及其應(yīng)用[M].北(běi)京:機械工業出版社,1996.
[3]張明亮,解旭輝,李聖怡.開放性數控技術的發展[J].機電工程,1999(4):69—71,4.
[4]戴曉華,王文.開放式數控係(xì)統研究綜述[J].組合機床與自(zì)動化加工技術,2000(11):5—7.
[5] 章富元,方江龍,湯季安.對我(wǒ)國數控技術發展的思考(kǎo)[J].中(zhōng)國機械工程,1999(10):28—31.
[6]王令其,屈(qū)波.開放式結構的機床數控係統[J].機床與液壓,2001(6):92—93.
[7] 郭豔(yàn)玲,趙萬生,董本誌,等.數控發展的趨勢——開(kāi)放式(shì)體係結構數控(kòng)係統[J].東北林業大(dà)學學報,2000,28(5):148—150.
[8] 白建華,黃海(hǎi)峰.開放式CNC與現代運動控製(zhì)技術的發展[J].機電工程,2001(4):l一4.
投(tóu)稿箱:
如果您有機床行業、企業相關新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)係本網編輯部(bù), 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)係本網編輯部(bù), 郵箱:skjcsc@vip.sina.com
更多相(xiàng)關(guān)信息
州金馬")
業界視(shì)點
| 更多
查")
行業數據
| 更多
- 2024年11月 金屬切削機床產量數(shù)據
- 2024年11月 分地區金(jīn)屬(shǔ)切削機床產量數據
- 2024年11月 軸承出口情況
- 2024年11月 基本型(xíng)乘用車(轎車)產(chǎn)量數據
- 2024年11月 新能源汽車產量(liàng)數據
- 2024年11月 新能源汽(qì)車銷量情況
- 2024年10月 新能源汽車產(chǎn)量(liàng)數據
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切削機床產量數據
- 2024年10月(yuè) 金屬切削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本型乘用車(轎車)產量數據