


基於 MATLAB 的插床機(jī)構運動學和動力(lì)學規律分析
2019-9-17 來源: 河南理工大學 機械與動力工程學院 作(zuò)者:吳雪峰(fēng) 張惠陽 張洪銘 範玉
摘(zhāi) 要: 插床導杆機構(gòu)作為一個典型連杆機構,其運動學和動力學分析(xī)具有很強的代表性。 通常可利用圖解法對插床導杆機(jī)構進行分析,由於手工繪圖過程繁(fán)瑣,求解精(jīng)度有限,很容易產生誤差。 采用矢量解析法對插床導杆機(jī)構進行分析,利用矩陣法求解,不僅求解精度高,而(ér)且通過(guò)繪出機構相應的運動和(hé)動力線圖,能形(xíng)象快速的表達出原動件轉動角度和各構(gòu)件運動和動力特性之間的關係,具有很大的優勢,便於機構的優化設計。
關鍵詞: 插床; 運動(dòng)學分析; 動力學分析;連杆(gǎn)機(jī)構
0 引言
插床主(zhǔ)要用來槽類特征加工。 加工時工作台上的工件做縱向、橫向或旋轉運動,插(chā)刀做上、下往(wǎng)複運動,切削工件。 插床主要由齒輪(lún)機構、導杆機構和凸輪機構等組成。 插床(chuáng)導杆(gǎn)機構即插床(chuáng)主運動的機構,由曲柄滑(huá)塊為基礎拓展(zhǎn)而成,以低副連接形(xíng)成的單自由度連杆機構。
對插床的(de)導杆機構運動學分(fèn)析和動力學分析有利於對插(chā)床工作性能的(de)把握。 其分析方(fāng)法分為圖(tú)解法和解析(xī)法,圖解法能簡單地呈現機構的某一個或某幾(jǐ)個位置的運動和動力特性,精度滿足實際問題的要求。本(běn)文利用矢量方程解析法,分析原動件旋轉(zhuǎn)角度與(yǔ)刀具的(de)位移、速度(dù)、加速度,在此基礎上確定出各鉸支座受力以及平(píng)衡力矩之間的聯係,進而得到機構整個運動循環過程中的運動學和(hé)動力學特性,為後續機(jī)構強度和機(jī)構形(xíng)狀(zhuàng)設計奠定穩固的基礎。
1 、插床導杆機構的運動學分析
插床導杆機(jī)構簡圖如圖 1 所示,該插床導杆機構(gòu)的工作(zuò)過程可看作原動(dòng)件 O2A 杆以等角速度做定軸(zhóu)轉動,並且帶動從動件 AB 杆(gǎn)和 BC 杆做平麵運動,最後再帶動插刀 5 沿導路做上、下往複運動,對工件進行切削。
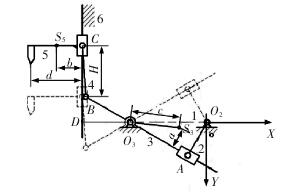
圖 1插床(chuáng)導杆機構簡圖
(1)位置分析在圖(tú) 1 所示的機構簡(jiǎn)圖中,以(yǐ) O2為原點建立直角坐標係,並(bìng)標(biāo)出各(gè)杆矢量及其方位角。利用三角形O2O3A 和四邊形 O3BCD 兩個矢量圖形 ,分別建立(lì)矢量方程為:

由式(3)和式(4)即可求(qiú)得導杆 3 的方位角(jiǎo)和滑塊 2 在導杆上的位置,代入式(5)和(6),即可求得連杆 4 的方向(xiàng)角和插刀 5 的位(wèi)置。
(2)速度分(fèn)析將式(3)~式(6)對時間求一階導數,並寫成矩陣形式,即得到以下速度矩陣(zhèn)
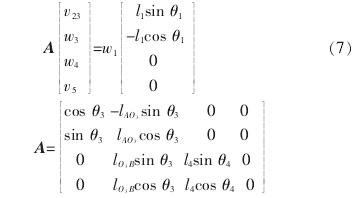
通過式(7)可得到刀具的速度 v5和構件 2 的(de)相對(duì)速度 v23,構(gòu)件 3 的角速度 w3和構件 4 的角速度 w4。(3)加速度分析對式
(7)對(duì)時間求一階導數,便得(dé)到加速(sù)度矩陣
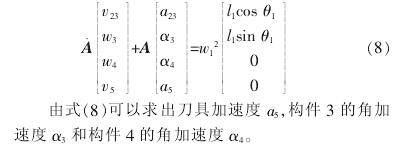
表 1 機構尺寸及構件重量

插床導杆機(jī)構中的滑塊的運動即是插床(chuáng)中刀具的運動,導杆機構尺寸及各構件重量如表 1 所示,利用 MATLAB 軟件計算(suàn)得到滑塊的運動學分析曲線如圖 2 所示,得(dé)到刀具的速度最大為-0.204 m/s(負號表示方向向上),加速度最大為+0.613 m/s2(正(zhèng)號表示與(yǔ)此時(shí)速度方(fāng)向相同)。 刀具在變速運動中產生的加速度會引起慣性力,在刀具加(jiā)工過程中,此慣性力對刀具(jù)產生柔性衝擊(jī),因此在刀具(jù)的選擇上還要考慮到柔性衝擊的影響。
2 、插床導杆機構的動力學(xué)分析
插床對工件進行切削加工,其(qí)對力的要求相對較高,同時機構的約束反力是進行強(qiáng)度分析的基礎。由導杆機構(gòu)的運動學分析得到各構件(jiàn)的(de)相關(guān)構件質心角速度和加速度,可求出構件 3 和構件 5 的慣性力F13和慣性力偶矩 M15。
在用矩陣法對導杆機構進行分析時,通過建立以 O2為原點的平麵直角坐標係,然後分別對各個構件列出力平衡方程,對於構件導杆機構中任一活動構件 i,都列出 3 個力平衡方程式,因此導杆機構可(kě)列出 15 個力(lì)平(píng)衡方程式,得到各運動副的約束(shù)反力如圖(tú) 3 所示。
由圖 3 可以分析出,當切削阻力發生變化時,各鉸支座約束力也會發生迅速變化,切削阻力延 Y 軸正方向,因此各鉸支座(zuò) Y 軸分力相對於 X 軸(zhóu)分力更大(dà)。

圖 2 滑塊(kuài)的運動學分析曲線圖
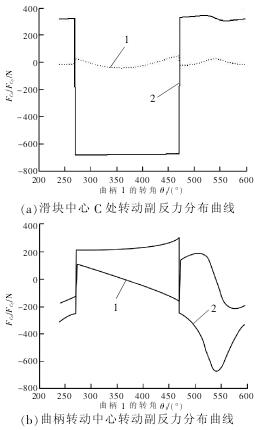
圖 3運動(dòng)副反力曲線1. FCx2. FCy
3 、利用動能定理求解平衡力矩
由於在一個工作循環中,刀具受力(lì)變化將引起主軸(zhóu)的速率波動,需要用飛輪調速,減小電機容量和提高切削質量。 平衡力矩(jǔ)是選用飛輪轉動(dòng)慣量的重要(yào)依據。 本文(wén)利用動能(néng)定理求解,可避免對於各約束反力(lì)求解,簡化計算過程。該導杆機構的運動方程式為
運用動能定理求解平衡力矩不需要展開為(wéi)矩陣,進行複雜的運算,可以直接帶入 MATLAB 程序中(zhōng),得到相應的數據結果。 其平衡力矩Mb曲線圖如圖 4 所示。
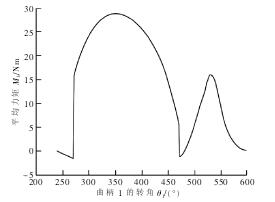
圖 4平衡力矩曲線圖
由圖 4 可以分析出,當切削阻力變化時,平衡力矩也會發生迅(xùn)速變(biàn)化。 其中平(píng)衡(héng)力矩最大值(zhí)為28.88 Nm,最小(xiǎo)值為-1.43 Nm。
4 、結語(yǔ)
為得到插床導杆機構運動學和動(dòng)力學規律,本文首先對插床導杆機構進行運動學分析和動力學分析(xī),建立其矢量模型,然後利用 MATLAB 軟件的矩陣運算功能,獲得其運(yùn)動和動力特性,並將結果可視化,獲得插刀的位移、速度(dù)、加速度、以(yǐ)及各構件的約束反力隨原動件轉動角度變化的規律,最後,利用動能定理(lǐ)求出平衡力矩。 上述分析方法為插床導杆機構(gòu)的優化設計奠定理論基礎,同時也為其他(tā)連杆機(jī)構進行運動學(xué)和動力學分析提供了很好的(de)借鑒。
投稿箱:
如果您有機床行業、企業相關新聞稿件(jiàn)發表,或進行資訊合作,歡迎聯係本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件(jiàn)發表,或進行資訊合作,歡迎聯係本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息
")
業(yè)界視點
| 更多

行業數(shù)據
| 更多(duō)
- 2024年11月(yuè) 金屬切削機(jī)床產量數據
- 2024年11月 分地區金屬切削機床產量數據
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘(chéng)用車(chē)(轎車)產量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源汽(qì)車銷量情況
- 2024年10月 新能源汽車產(chǎn)量數據(jù)
- 2024年(nián)10月(yuè) 軸承出口情況
- 2024年10月 分地區(qū)金屬切削(xuē)機床產量數據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源汽(qì)車銷量情況
- 2024年8月 新能源汽(qì)車(chē)產量數據
- 2028年(nián)8月 基本型乘用車(轎車)產量數據
博文選萃
| 更多