


編碼器在經濟型(xíng)數控車床剛性(xìng)攻(gōng)絲的應用
2016-10-26 來源:沈(shěn)陽(yáng)飛機工業(集團)有限公司民機加工分部 作者:王思廣
摘(zhāi)要:在數控係統中,剛性攻(gōng)絲是一項基(jī)本功能,但在經(jīng)濟型數控車床上一般使用模擬主軸,經(jīng)濟實用,可是(shì)如何(hé)實現(xiàn)車床攻絲這種基本功能呢?本文從工作中的實例出發,由位置編碼器的基本原(yuán)理、模擬主軸實現剛(gāng)性攻絲的條件、及係統和(hé)變頻器接口的連接,初步介紹(shào)了在FANUC0i 數控係統中,利用位置編碼器來實現(xiàn)模擬主軸的剛性攻絲。
關鍵詞:位置編(biān)碼器;模擬主軸(zhóu);剛性攻(gōng)絲;經濟型數控車床
0。引言
模擬主軸通常用於經濟型數控車床,剛(gāng)性攻絲(sī)是車床的一個(gè)重要功能。剛性攻絲(sī)是指主軸旋轉與進給之間保持同步,也就是說攻絲時株(zhū)洲的旋轉不僅要實現速度控製,還要實現位置(zhì)控製,從而實現特定的加工要求。如何實現模擬主軸的剛性攻絲呢?位置(zhì)編碼器起著至關重要的作用。本文簡要介紹(shào)了這(zhè)種控(kòng)製(zhì)實現(xiàn)的一(yī)些基本原理和要求,通過兩個(gè)實例介紹了位置編碼器在經濟型數(shù)控車床的(de)應用(yòng)。
1.位置編碼器的(de)應用
在數(shù)控係統中,位置檢測元件是閉環進(jìn)給伺服係統中重要的組成部分,它檢測機床工作台(tái)的位移,伺服電(diàn)機的角位移和速度,將信號反饋給驅動裝置,與給定值比較得到差值再用於位置環閉環(huán)控製和速度環控製。檢測(cè)元件通常用光或磁的(de)原理製成,精度(dù)既分辨率是(shì)最小單位,由檢測元件等級品質決(jué)定。在數控裝置位置(zhì)檢測接口電(diàn)路中常對反饋信號進行(háng)倍頻處理,以進(jìn)一步提高(gāo)精度。
數控車床的位置(zhì)編碼器是測量轉速的,反饋的是主軸(zhóu)的實際速度,當(dāng)車螺紋(wén)時要使轉速和進給保持一定關係,如導程1.5 的螺紋,車削時必須保證主軸轉一轉,刀具軸軸向(xiàng)進給1.5。
螺紋切削或每轉進給必須裝有位(wèi)置編碼器,位置編碼器檢測實際主軸轉速和每轉信號(用於螺紋切削時檢測主軸上固定點)理想編碼器必須(xū)與主(zhǔ)軸相連(1:1)。如使用齒輪,選擇(zé)1:1,1:2,1:4,1:8 的變化以降低(dī)位置(zhì)編碼器的速度。當主軸與位置編碼(mǎ)器之間使用齒輪時,參考NO.3706 的第1 位和0 位定義齒輪比。
2.模擬主軸實現(xiàn)剛性攻絲的條件
2.1 主軸電機帶位置編碼器
通過位置編碼器對主軸實現位置(zhì)控製。這樣(yàng)在速度環的基礎上擴大到位置環,在剛性攻(gōng)絲的過程中主軸與進給都是位置控製,就可以形成互相插補的關係,能夠達到更嚴(yán)格(gé)的同步。
2.2 數控係(xì)統的接口
數控係統必(bì)須有模擬主軸接口和模擬主軸編碼(mǎ)器的接(jiē)口。模擬主軸接(jiē)口既要要求係統能(néng)夠根據主軸速度準確發出0 ~ ±10V 的模擬電(diàn)壓。為了提高模擬電壓的精度,要求D/A 轉換器至(zhì)少12 位。模擬主軸編碼器的接口用來接收主軸的編碼器信號及時(shí)對主軸實行對主軸位置控製。
2.3 變頻器的接口
主(zhǔ)軸變頻器必須具有(yǒu)編碼器接口,±10V 的模擬電壓接口,並且能在速度控製和(hé)位置控製提供兩組參(cān)數對主軸進行分別調整。此兩組參數來在(zài)速度控製時對(duì)速度控製參數對主軸(zhóu)進(jìn)行調整,在位置控製時,有(yǒu)位置控製參數進行調整以適合(hé)剛性攻絲時高增益、高係統的配置。
3.故障實(shí)例
CKS6163 自動運行進給軸不(bú)移動。數控車床CKS6163,係統型號FAUNC-0i-TA,程序在G00 方式下可運行,當執行到G01 時機床進給軸不移動,但在JOG、REF、手輪方式下均(jun1)可移動車(chē)床。因為機床坐標軸可以移動,說(shuō)明伺服放大(dà)器、電機、反饋等(děng)硬件都沒問題。
依據梯形圖,如圖1 所示:SF(F7.2):主軸功(gōng)能(néng)選通信號;MF(F7.0): 輔助功能選通信號;TF(F7.3): 刀具功能(néng)選通信號;MFIN(R450.1):輔助功能結束信號;TFIN(R450.2):刀具功能結束信號;GR:齒輪(lún)檔(dàng)。
SAR(G29.4) 主軸速度到(dào)達信號。當主軸速度達到(dào)指定速度後(主軸速度反饋裝置將實際主軸(zhóu)速(sù)度信息傳(chuán)送(sòng)到CNC 中),係統輸出(CNC 至PMC)主軸速度達到(dào)信號F45.3=1(SARA),PMC 再根據接收的信號進行邏輯關係處理。參數(PARAM3708#0=1)時,該功能有效(xiào)。
從PMC 梯圖可以看出,在(zài)主軸速度沒有達到指令轉速時限製機床在G01 方式運行(háng),結合速度反饋結構,檢查速度反饋裝置,該車床的速(sù)度反饋是依賴於電機編碼器,將編碼器拆開後(hòu)發現與電機相連(lián)接的鍵脫落,這樣就導致主軸正常旋轉,但編碼器反饋的速度值則為0。
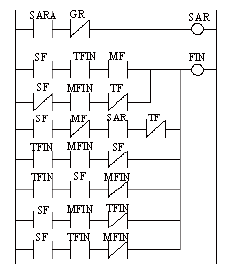
圖1 CKS6163 梯形圖(tú)
通過工藝(yì)角度分析此問(wèn)題,發現G01 是“進給吃刀”的(de)過程,此時主軸一定是遵循S 指令旋轉的,假設由於主軸驅動環節(jiē)出了(le)故障,主軸轉速會(huì)下降,那麽如果吃刀進給,則會給工件及機(jī)床造成嚴重損傷。因此(cǐ)係統(tǒng)提供(gòng)了一個製約功能,當主軸速度設有達到指(zhǐ)令轉速時,限製G01 方式進給(gěi),但G0,JOG\REF 以及手輪方式不受此限製。
4.結論(lùn)
剛性攻絲時主軸的旋轉和進給軸進給之間總(zǒng)是保持(chí)同步。也就(jiù)是說,在(zài)剛性攻絲時,主軸的旋(xuán)轉不僅要(yào)實現速度控(kòng)製,而且要實現位置的(de)控製,從而實現高精高效的加工要求(qiú)。係統發出0 ~ ±10V 模擬電壓到變頻器的模(mó)擬接(jiē)口(kǒu),控製模(mó)擬主軸的旋轉。位置編碼(mǎ)器的(de)使用(yòng)是經濟(jì)型數控車床(chuáng)實(shí)現剛性攻絲的必要條件,當然此功能(néng)的實(shí)現還要對係統參(cān)數進行(háng)深入了解,及PMC 程(chéng)序的改(gǎi)編,此文意在對今後此類問題(tí)的研究(jiū)提供借鑒(jiàn)。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行(háng)資訊合作,歡迎(yíng)聯係(xì)本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行(háng)資訊合作,歡迎(yíng)聯係(xì)本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息
")
