床")



工業機器人在衝壓自動化生(shēng)產線(xiàn)中的應用研(yán)究
2017-4-6 來源:清遠市技師學院 作者:曹智
摘要:在技術日新月異的年代,自動(dòng)控製技術得(dé)到飛速發展,在工業領域逐漸得到廣泛應用,尤其在工業機器人(rén)出現後,能夠保證(zhèng)工業生產(chǎn)的安全順利進行,並將工業成本控製在(zài)最低範圍(wéi)內,以其自身靈活性和便捷性受到社會的高度重視。本文主要(yào)探討了在衝壓生產線中利用工業機器人代替(tì)生產的自動控製係統,以(yǐ)更好地滿足工業生產與發展需求,僅供(gòng)相關(guān)人員參考。
關鍵詞(cí):工業機器人;衝壓自(zì)動化;生產線;應用(yòng)
作為(wéi)工業生產中的重(chóng)要工藝生產線(xiàn)的(de)衝(chōng)壓自(zì)動化生產線,利用(yòng)工業機器人(rén)可以提高生產(chǎn)效率,在一定程(chéng)度上對工業生產成本進行優化控製,維護工業生產的綜合效益。工業機器人作為(wéi)自動化設備中的執行機構,在衝壓自動化生產線上利用具有(yǒu)良好的應用(yòng)價值,以下對該係統進(jìn)行分析。
1.工業機器人概述
1.1 概念。
工業機器人是指(zhǐ)在工業領域內所應用的機械手或(huò)機器人,其具有多關節和多自由度。在(zài)實際(jì)應用中,通過對工(gōng)業機器人的運行(háng)程序進行預先設定,即可實現自動執行具體工作,並基於自身控製係統和動(dòng)力係統實現預定功能,從而保證工業機器人的規範操作。可以通過現場對工業機器人控製或者通過預(yù)先編輯好程序來控(kòng)製工業機器人,是其達到完成指定任務的目的。
1.2 結構類型。
工業(yè)機器人主要包含控製係統、機器人(rén)主體以及驅(qū)動係統等組成部分(fèn),其中(zhōng)機(jī)器人主體作為(wéi)執行器件,其性能非常關鍵,它一般包含機座(zuò)與(yǔ)執行(háng)機構。而要想(xiǎng)機器人本體動起來還需有驅動係統,它由(yóu)傳動機構(gòu)和(hé)動力裝置組成。工(gōng)業機器人(rén)的關(guān)節位的動作大多(duō)包含1~3個自由度,自由度總數可在3~6個左右。工(gōng)業機器人作業過程中,基於技(jì)術人員在控製係統中編(biān)製程序實現對驅動係統(tǒng)及機器人主體發號施令,並控(kòng)製機器人的執行動作,從而確保工業機器人的規範操作。1.3 特性分析。多數情況(kuàng)下我們可以通過將數控伺服軸,遙(yáo)控操作器等進行有序連接,再利用預先設置好的程序驅動電路控製機器人本體,讓機器人(rén)動作有效(xiào)地進行。一般應(yīng)用於(yú)衝壓(yā)自動化生產線中的工業機器人(rén)具有行走功能,由於其內部具有模擬人類感知係統,在執行動作的過程中(zhōng)能夠基於此(cǐ)係統完成各項操作,在保(bǎo)證衝壓自動化生產質量與效率的同時,達到控製生產成(chéng)本的目的。工業機器人具(jù)有較(jiào)高的柔性,在控製程序修改上有一定可操作性,從而促進各項功(gōng)能與動作的順利實現,更好地(dì)滿足衝壓自動化生產線的對工業機器人的應(yīng)用需求。
2.機器人衝壓係統的設計
工業生產具有一定複雜性和(hé)危險性,工業(yè)機器人(rén)的應用,大多是代替人來從事危險係數較高以及(jí)重複率較高的動作,以促進工業生產的高效開展。其應用如圖1所示。工業機器人(rén)在(zài)衝壓生產環節中主要體現在5個方麵(miàn):拆(chāi)垛係統、塗油機、對中台、壓力機兼(jiān)上下(xià)料係統以(yǐ)及線尾輸送係(xì)統。
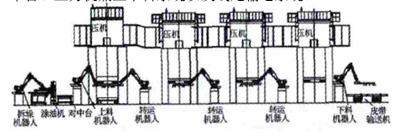
圖 1 機器人自動化生產線示意圖
2.1 係統的運行方式。
衝壓自動化生產的環節(jiē)中,工業機器人需要有規範、合理的(de)工作流程,精確到位(wèi)的(de)動作,才能確保工業機器(qì)人準確可靠的完成指定任務,這是安全生產(chǎn)、可靠生產(chǎn)的基礎。在生產過程中工業機器人的首要任務是垛料拆垛,之後進行板料對中(zhōng)操(cāo)作,應用上料(liào)機器人(rén)進行放料相關操作(zuò),待衝(chōng)壓後,利用下料機器(qì)人進行取料放料,再次衝壓(yā)後,結合生(shēng)產(chǎn)中所需工序的數量循環進行,末端衝壓後,利用線尾機器人進(jìn)行取料(liào)放料,並以人工方式進行碼垛處理。
2.2 係統組成。
根據衝壓工藝,係統主要(yào)包含(hán)拆垛係統、上下料係統、線尾輸送係統、對中(zhōng)台、壓(yā)力機等組成。工業機器人能夠為拆垛係統(tǒng)的安全高(gāo)效運行提供可靠保證。自動拆垛(duǒ)係統主要由走(zǒu)帶電機(jī)、拆垛小車、自動塗油裝置等組成,料台為雙垛可循環式,確保生產連續(xù)進行,分料通過分張器將量分成單張,確保每次進料。在(zài)不同的位置條件下,走帶電機也處於不同狀態,板料通過導出式傳送帶傳到中(zhōng)台(tái),在導入式傳送帶的作用下,從拆垛機中取出物料(liào)放入塗油機中。在衝壓自(zì)動化生產線中(zhōng),拆垛小車的作用(yòng)是停放於上料後或上料區中,為後續機器人開(kāi)展取料等操作提供極大的便利。當板料置於自動塗油機中時對板(bǎn)材表麵進(jìn)行塗油,保證塗油操作的規範性,從而提高板件抗腐蝕能力和潤滑(huá)程度。對中台可方便的定位固件,這樣確(què)保衝(chōng)壓的正確性和可靠性。確保板件在衝壓自(zì)動化生產線中能夠得到良好應用。
2.3 控(kòng)製係統。
控製係統作為係統的中心環節有著非常重要的作用,它的有效性和可靠性直接影響著(zhe)工(gōng)業機(jī)器(qì)人在衝壓過程中的實際應用效果,通過(guò)研究可知,在(zài)工業衝壓自動化生產線中,先進且可靠的控(kòng)製係統能夠為工業機器人各項功能的發揮(huī)以及(jí)動作的準確執行提供可靠的保證。該衝(chōng)壓自動化控(kòng)製係統(tǒng)中(zhōng)的主要工作是實現(xiàn)上下料係統、線(xiàn)尾輸(shū)送係(xì)統以及(jí)中台係統等的統一監管、調(diào)度和控製。為了能最大程度(dù)地發揮工業機器人的作用,在係統(tǒng)中(zhōng)我們設置有(yǒu)數據層和物理(lǐ)層,根據實際情況,通(tōng)過調節軟硬件的參數設(shè)置。
2.3.1 數據層。
數據層的主要作(zuò)用是完成數據(jù)的(de)傳(chuán)輸和處理,在係統中我們主要通(tōng)過利(lì)用現場總線技術來實現(xiàn)個物理層或(huò)各設備之間的連線自控,而總線有多種,如Profibus總線EPA以太網總線等。為了提高係統運行的有效性和可靠性,數據層的數據傳送和處理非常關鍵,我們選(xuǎn)擇用線少,方便,快捷,可靠的EPA技術。連接各EPA設備,配備Ethernet Card相關的網絡(luò)設備實(shí)現機器人控(kòng)製係統接(jiē),監控網絡係統的對接,通過DCS控製係統實現集中管理(lǐ)分散控製的(de)功能(néng)。這(zhè)樣可以減少機器人因反複動作或(huò)其他(tā)原因(yīn)而(ér)造(zào)成的數據層損(sǔn)壞錯誤等情況(kuàng),達到係統安全、穩定、有(yǒu)效、可靠的運行的目(mù)的。
2.3.2 物理層。
物理層主要作用是采集數(shù)據和處理數據,是軟件係統運行的基礎,它的先進性和(hé)可靠性非常關鍵,它主要包括控製站、操作站(zhàn)、數據轉換(huàn)接口、現場控製層、現場數據采集、執行機(jī)構等設備組成。現場設備(bèi)通過現場總(zǒng)線和現場(chǎng)控製層連接(jiē)。現場控製(zhì)設備主要采用西門(mén)子PLC,數據采集和相應的EPA設備主要采用浙大中控設備為主。所選擇的物理層設備要有較強的開放能力,EPA通信,能夠將數據層的PLC開展數據交換,便於(yú)係統對各項設備數據有序采集,以確保控製係統能夠對工業機器人動作準(zhǔn)確控(kòng)製,提高各項(xiàng)動作執行的規範性。
2.3.3 人機交互平台。
人機交互平台作為直接操作的界麵,他的整潔性、方便性(xìng)、操作性、功能(néng)齊全性等非常(cháng)重要。在計算機組成的中控操(cāo)作站中,我們主要利用(yòng)浙大中控提供的Configuratiom和Advan Trol Pro相關軟(ruǎn)件進行。現場操作站可選擇西(xī)門子提供的觸摸屏。其操作麵要(yào)具(jù)備給單元及功能模塊的檢測信息及錯誤報警,各環節操作(zuò)流程和操作提示,各環節相(xiàng)關參數的顯示和操作,相關操作的互鎖功能及動畫(huà)界(jiè)麵等。在具有一定特殊性的基礎上,利用總線實現不同(tóng)控製單元的有(yǒu)序連接,對診斷信息進行準確分析,並(bìng)顯示出工業機器人的錯誤操作並進行預警,便於相(xiàng)關技術人員發現問題的(de)第一時間(jiān)進行妥善處理,以便在短時間內對故障問題(tí)進行妥善(shàn)處理,從而保證控製係統的高效(xiào)運(yùn)行,提高衝壓自動化生產線的生產效率。
2.4 安(ān)全係統。
安全係統是自動控製係統(tǒng)自動生成,安全生產的命門,在(zài)物理層,我們需要利用安全柵等硬件來確保安全(quán),在硬(yìng)件的使用和軟件方麵采取(qǔ)冗餘結構,在它們的設置方麵采用(yòng)互鎖功能來保障安全。利用聲(shēng)光報警(jǐng)燈方式及時提醒。在各關鍵環節如上下料,衝壓(yā)等環節設置好啟動和急停按鈕。利用這(zhè)些(xiē)手段做到提前預知故障,故障及時知曉,故障出現時做到自動恢複或安全處理停機處理,便於工作(zuò)人員及時維修(xiū)處理,為(wéi)安全生產保駕護航。
2.5 仿真模(mó)擬係統。
仿(fǎng)真模(mó)擬(nǐ)係統是用於投運、教學演練、生產調試等(děng)。它的作用主要是在生產投運前做到有問題提前及時發現,不將問題帶入(rù)生產。在員工或學員培訓時能方(fāng)便直觀地了解和操作係統,做到在最短的時間內熟練操作的目的。在生產調試過程中可以(yǐ)反複地模(mó)擬後(hòu)再實踐,減少設備磨損和故障,縮短現場的調試時間(jiān)。
3.結語
總而言之(zhī),隨(suí)著(zhe)現代科學技術的不斷進步,技術方麵和設備方(fāng)麵也越來越科學新穎,使得衝壓技術也得到(dào)優化(huà),工業機器(qì)人的出現和應用,有效地代替(tì)了人工勞動,促(cù)進了工(gōng)業生產效率(lǜ)的不(bú)斷提升,為工業產品質量控製打下良好的基礎。尤其是在衝壓自動化(huà)生產線中(zhōng),工業機器人的應用促(cù)進了自動(dòng)化生產水平的(de)提(tí)升,並且將工業生(shēng)產成本控製在最佳(jiā)範圍內,在工業生產領域受到廣泛關注。
投稿箱:
如果您有機床行業、企業相關新聞稿件(jiàn)發表,或進行資(zī)訊合作,歡迎(yíng)聯係本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件(jiàn)發表,或進行資(zī)訊合作,歡迎(yíng)聯係本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息
馬")
業界視點
| 更多

行業數據
| 更多
- 2024年11月 金屬切削機(jī)床產量數據
- 2024年11月 分地區金屬切削機床產量(liàng)數據
- 2024年11月 軸承出口(kǒu)情況
- 2024年(nián)11月 基本型乘用車(轎車(chē))產量數據
- 2024年11月 新(xīn)能源汽(qì)車產量數據
- 2024年(nián)11月 新(xīn)能(néng)源汽車銷量情況
- 2024年10月 新能源汽車產量數據
- 2024年10月 軸承(chéng)出口(kǒu)情況
- 2024年10月 分地區金屬切削機床產量數據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源汽車銷(xiāo)量情況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本型(xíng)乘用車(轎車)產量數據
博文選萃
| 更多
- 機械加工過程圖示
- 判斷一台加工中心(xīn)精(jīng)度的幾種辦法
- 中走絲線切割機床的發展趨勢
- 國產數控係統和數控機床何去(qù)何從?
- 中國的(de)技術工人都去(qù)哪裏了?
- 機械老板做了十多年,為何還(hái)是小作坊(fāng)?
- 機械(xiè)行業最新(xīn)自殺(shā)性營銷(xiāo),害(hài)人害己!不倒(dǎo)閉才
- 製(zhì)造業大逃亡
- 智能時代,少談點智造,多談點(diǎn)製(zhì)造(zào)
- 現(xiàn)實麵前,國人沉默。製造業的騰飛,要從機床
- 一文搞懂數控車床加工刀具補償(cháng)功能
- 車床(chuáng)鑽(zuàn)孔攻螺紋加工方法及工(gōng)裝設計
- 傳統鑽削與螺旋銑孔加工(gōng)工藝的區別