")



一種新型四擺臂履帶式救援機器人(rén)的行走機(jī)構設計
2016-12-30 來源(yuán):東南大學機械工程學院 作(zuò)者:丁豪,錢瑞(ruì)明
摘要:依據災難救(jiù)援(yuán)的現實要求和對國內外救援機器人典型結構的分析比較,提(tí)出(chū)一種由主體模(mó)塊、內擺臂模塊和外擺臂模塊組成的新型行走係統,設計了相應的(de)傳動機構及關(guān)鍵尺寸,結合跨越(yuè)台階分析了機器人的行走形態及各模塊的運(yùn)動方式,體現了所設計救援機器人的重心位置調節功能在提高越障能力和越障(zhàng)過程平穩(wěn)性方麵的作用。
關鍵詞:履帶式救援機器(qì)人(rén);行走係統;模塊化設計;重心位(wèi)置調節
0. 引言
救援機器人是移動機器(qì)人在災(zāi)難救(jiù)援領域(yù)中的一種應用。目前問世的救援機器人種類較多,其中具有多地形適(shì)應性的移動機(jī)構主要有輪(lún)式、履帶式、腿足式、多節履帶式(腿履複合式)等類型。此類移動機構在具(jù)體應用時常存在越障性(xìng)、靈活性與機械結構、控(kòng)製係統開發方麵難以(yǐ)協調統一的問題。例(lì)如輪式履帶式機器人(rén)結(jié)構簡單,易於控製,但其越障性能(néng)不高,運動靈活性不高;多節履帶式救援機器人具(jù)有較多的關節數和自由度(dù)數,運動靈活性和地形適應性高,但傳動係統和控製係統複雜【l】。因此,如(rú)何使移動機構與功能要(yào)求得到最佳匹配,是救援機器人開發與應用的關鍵問題。
現(xiàn)通過對常用四擺臂履帶式救援機器人配置結構的改進,提出(chū)一(yī)種質心位置(zhì)可調的新型四擺臂履帶式救援(yuán)機器人結構方案(àn),並(bìng)完成行走係統的設計。與傳統的(de)四(sì)擺臂履帶式機器人相比,該結構最大的創新點在於取消了主體履帶.加強了4個擺臂的作用.同時通過對(duì)主體模塊的轉動(dòng)控製.可以調整質心位置(zhì)和變換觸地的擺臂履帶。該機器人(rén)綜(zōng)合了多節履帶式救援機器人的優點,具有(yǒu)較強(qiáng)的地形適應能力(lì)和越障能力。同時該機器人整體結(jié)構布局緊(jǐn)湊,具有一定的對稱性(xìng),且未(wèi)增加自由度和(hé)控製難度。
1.救援機器人(rén)行走係統方案設計
目前。國內外均較為(wéi)重視救援機(jī)器人的研製(zhì)工作,並取得一定的研究成果(guǒ)。日本東京工業大學廣瀨研究室從仿生的角度和基於超機械係統的思想先後研(yán)製了AcM、GENBU與soRYu等多款(kuǎn)救援機器人樣機(jī).可在各種狹小場(chǎng)所甚至水下進行救援【2】。美國“機器人輔助搜救中心”已經投入災難救(jiù)援現場使用的8種機器人。包含(hán)了輪式(shì)、腿式、腿履複合式等(děng)多種結構,在現場取(qǔ)得較好(hǎo)效果。在我國,中國科學院(yuàn)沈陽自動化研究所以及(jí)各大高等院校均開展了有關救援機器人(rén)的研究【3]。廣州衛富科技公司研製的“衛富”危險作業機器人,采用三節折(shé)疊式履帶(dài)移動機構,可輕鬆翻越40咖高(gāo)的障礙。上下400斜坡和樓(lóu)梯。沈陽自動化研究所靈蜥係列機器人(rén),采用輪一腿一履帶複合式移動機構。行走方式的不同切(qiē)換使其具備較強的地麵適(shì)應力。
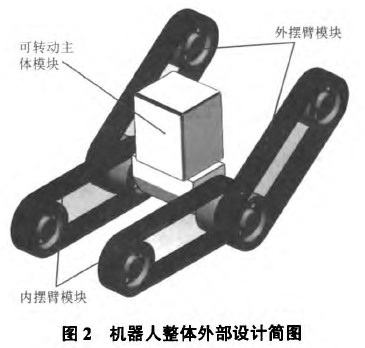
救援機器人的越障(zhàng)性能是實際環境特點與機器人機(jī)構特點交互作用的結果。在機器人的設計過程中.除了提出滿足基(jī)本越障要求的機構方案(àn),還需要根據實際環境對(duì)機器人(rén)關鍵尺寸的約束。以保證救援機(jī)器人具有良好的機動性與越(yuè)障性能(néng)。災難現場環境特點較為複雜,文中所提出救援(yuán)機器人的設(shè)計則是根據R0bocup國際救(jiù)援機器(qì)人(rén)大賽所(suǒ)提供的簡化場地考(kǎo)慮的(de)。它可分為結構地(dì)形和非結構地(dì)形,結構地(dì)形包括樓梯、高台、斜(xié)坡等規則地形.非結構(gòu)地形形狀不(bú)規(guī)則,但也(yě)是規則(zé)地形的重組與配合。圖l所示為本課題組前(qián)期研製的一種四擺臂履帶式(shì)移動機器人,行走(zǒu)係統采用主體模塊和(hé)4個擺臂的配置方案。通過對4個擺臂的協調控製使其具有較強的越障性能。該行走係統共有6個(gè)自由度,是目前(qián)國內外較為常用的結(jié)構形式。現對這種多節履帶式行走係(xì)統進行改進,主要是取消了(le)主體履帶。改進後的行走係統三維外觀(guān)如圖2所(suǒ)示,它由主(zhǔ)體模塊、內擺臂模塊和外擺臂模塊組成,控製履帶轉(zhuǎn)動與擺臂擺動的傳(chuán)動機(jī)構都放置在擺臂內部,空間布局緊湊(còu)、對稱;外擺臂可繞擺臂中心軸擺動以輔助越障.主體模塊可圍繞(rào)中心(xīn)軸轉(zhuǎn)動,以調節重心,增強越障過程中的整體穩定性。

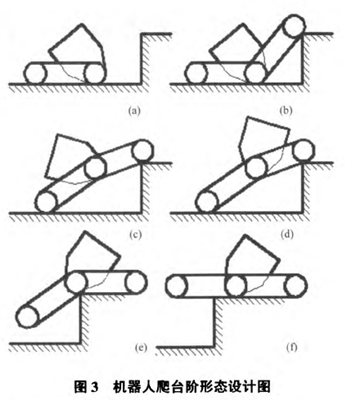
該救援機(jī)器人行走方案的設計,主要是強(qiáng)化了4個擺臂的作用(yòng)。圖3所示為(wéi)機器人爬台階時的形態(tài)設計圖,圖3(a)表示機器人(rén)先(xiān)以正常姿態行駛至台階前一定距離,此時內外擺臂並(bìng)未展開:圖3(b)表示機器人外擺臂擺動至(zhì)台階觸停;圖3(c)表示機器人繼(jì)續行駛同時外擺臂擺動.此時機器(qì)人重心在後;為保證機器(qì)人(rén)爬台階過程中的運動平(píng)穩性以及(jí)驅動力方(fāng)麵考慮,圖3(d)中主體(tǐ)模塊向前轉動一定角度:此後履帶繼續轉動,機器人接近攀爬成功,如圖(tú)3(e)所示;圖3(f)中擺(bǎi)臂已恢複水平位置,機器人成功爬上台(tái)階。在整個爬台階(jiē)的過程中(zhōng),機器人充分利用了前後擺臂的支撐作用,以及主體(tǐ)模塊前後(hòu)擺動、及時調節重心的作用,保證了機器人越障時的平穩性。
2.救援機器人傳動係統(tǒng)方案設計
根(gēn)據救援機器人行走係統設計要(yào)求,當內(nèi)擺臂模塊與
地麵接觸時,機器人存在履帶(dài)轉動、主體模塊擺動和2個外擺臂的相對獨立轉動等4個自由度(dù)。圖4所示為該機器人一側內外擺臂和主體模塊的傳動機構簡圖(tú)(異側結構對(duì)稱)。該(gāi)方案的空間配置使救(jiù)援機器人(rén)結構緊湊、對稱,具有良好的空間利用率。
2.1機器人履帶轉(zhuǎn)動傳動係統設(shè)計(jì)
如圖4所示,履帶(dài)轉動機構置於(yú)外擺(bǎi)臂內部。直流伺服電(diàn)動機l經自帶的減速器減速後,通過錐齒輪副2帶動外擺臂內傳動短軸3轉動,經過鏈(liàn)輪4、鏈5形成的鏈傳動將轉動效果傳遞到(dào)套筒6上,這樣,套筒(tǒng)即可帶動驅動輪7使得履帶進行轉動。其中,同側的內外擺臂是聯動的,均由同一個(gè)電動機提供驅動力。履帶轉動運動傳(chuán)遞路徑為:1—2—3—5-珥—+6—7。
2.2機器人擺臂擺動傳動係(xì)統(tǒng)設計
圖4中擺臂擺動機構(gòu)置於內(nèi)擺臂內部。其中,直流(liú)伺服電動機12經內部減速器減速後。首先帶動(dòng)蝸杆13進行(háng)轉動。從而蝸輪14繼之轉動.內擺臂(bì)內傳動短軸15將轉(zhuǎn)動效果(guǒ)傳遞到鏈輪16、鏈17形成的鏈傳動,從(cóng)動鏈輪與擺臂中心軸18是鍵連接的。而軸18與(yǔ)外(wài)擺臂擋板通過(guò)法蘭固定。從而,電動機(jī)驅(qū)動可引起外擺臂的擺動。擺(bǎi)臂擺動運(yùn)動傳遞路徑為(wéi):12一(yī)13一14一(yī)15一16一17一18。值得注意的是,套筒(tǒng)7與擺臂中心軸18是同軸的,二者相對主體中心軸11均可自由轉動,並且通過軸承、法蘭等連接(jiē)具有擺臂擺動與履帶轉動不同的運動(dòng)形(xíng)式,從而(ér)實現雙自由度(dù)輸(shū)出。
2.3機器人主體模塊擺動傳動係統(tǒng)設計
如(rú)圖4所(suǒ)示.主體擺動機構置於主體模塊(kuài)內部。電動(dòng)機8的輸出軸帶動小齒輪9轉動,並咬著大齒輪10進(jìn)行公轉,大齒輪通過花鍵與擋圈固定在(zài)主體中(zhōng)心軸(zhóu)ll上,而後者靠法蘭固(gù)定在內擺臂內(nèi)側板上。通(tōng)過合適的框架結
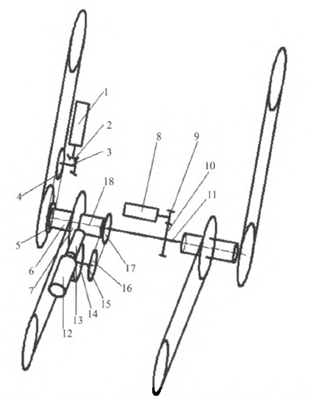
l一主覆帶電動機;2、3一(yī)錐齒輪副;4一主覆帶鏈輪;5一主覆
帶傳動鏈;6一套筒;7一覆帶驅動輪;8一主(zhǔ)體電動機;9、lO一主
體直(zhí)齒輪副;11一主體中(zhōng)心軸;12一擺臂電(diàn)動機;13一蝸杆;14一蝸輪;
15一傳動短軸;16一擺臂鏈輪;17—擺臂傳動鏈;18一擺臂中(zhōng)心軸
圖4機器人傳動方案機構簡圖
構可使小齒輪固定在主體箱上,這樣,主體(tǐ)便可以圍著主軸進行轉動,從而方便整體(tǐ)質(zhì)心的轉移。
3.救援機器(qì)人主參數設計
結合Robocup國際賽事所提供的地形,基於迷宮寬度、高台、樓梯等結構地形的具體尺寸。可確定機器人的關鍵尺寸。其中,走廊寬度形=l 200嗍,高台高度日=300 mm,樓梯踏步高^=200 mm,樓梯踏(tà)步寬6=250 mm。綜合各項指標,使機器人在滿足越障基本要求下,具有更(gèng)加緊湊的尺寸。
由於機器人的工作環境(jìng)具(jù)有一定的非(fēi)結構化和不確定性,機器(qì)人在運動過程中與(yǔ)環境(jìng)的交互作用較為複雜(zá)。針對機器(qì)人的(de)結構特點及其工作環境。計(jì)算時假設【5]:1)環境地麵(miàn)是剛性的;2)環(huán)境中無可移動的地形;3)機器人越障過程均為低(dī)速、勻速運動。且與環境平穩接觸。
3.1走廊行走
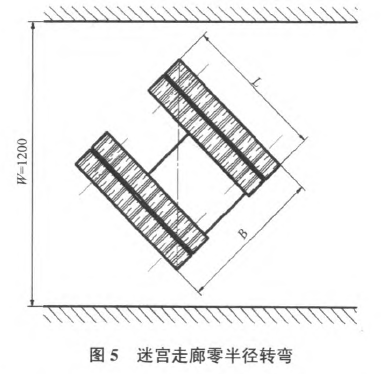
救援機器人最基本的運動需求是在平地走廊內自由(yóu)行走、轉向。假(jiǎ)設車體的寬度為(wéi)曰,長度為L,且履帶式移動機構可原地零半徑轉向,如圖5所示。因(yīn)此要滿足該機器人(rén)最長(zhǎng)對角線長度要小於走廊通道寬度.即:
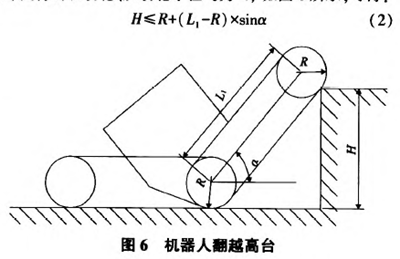
3.2翻越高台
救援機器人(rén)翻越高台過程中,擺臂長度必須要高於台階的高度,並且當擺臂與台階成某(mǒu)一角度(dù)(設a=500)時,
有(yǒu)足夠(gòu)的驅動力(lì)將機器人撐(chēng)起。擺臂的中心距為L1,內外擺臂的驅動輪、從動輪半徑均(jun1)為(wéi)尺,如圖6所示,可得:
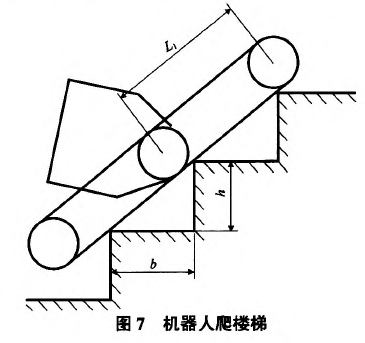
3.3爬(pá)樓梯
圖6機器人翻越高台(tái)就關節式履帶機器人而言(yán),若使機器人能夠(gòu)平穩地爬樓梯(tī),避免(miǎn)運動過程中衝擊等造成的不利影響,機器人擺臂長度必須(xū)要(yào)高於台階高度,且其展開總長至少能夠跨越3個台階。如圖7所示,可得:
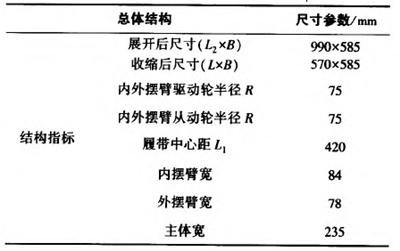
根據式(1)一式(3),並(bìng)結合機器人結構參數和Robocup國際(jì)賽事所提供的參(cān)數,可得機器人尺寸的理論範圍,再考慮(lǜ)到(dào)機器人的內部結構,鏈輪傳動等的設計。最終確定的救援機器人(rén)部(bù)分關鍵結構尺寸如表l所示。
表1救援機器人總體結構尺寸
4.結語
基於災難實地救援(yuán)的(de)現實需求,對目前國內外常見的四擺臂(bì)履帶救援機器人行走係(xì)統進行改(gǎi)進,提出了一種由主體模塊、內擺臂模塊和外擺臂模塊組成的(de)新型行走係統結構,可通過對機器人質心位置的調(diào)節(jiē),來提高機器人(rén)的越障能力和越障過程的平穩性(xìng)。文(wén)中(zhōng)詳盡闡述了機器人的行走方案(àn)及其傳動機(jī)構。並根據模擬環境確定了機器人的關(guān)鍵尺寸.可為該(gāi)型救援機器人樣(yàng)機的研(yán)製與(yǔ)應用奠定了設計基礎。
投稿箱:
如果您(nín)有機床行業、企業相關新聞稿件發(fā)表,或進行資訊合作(zuò),歡迎聯(lián)係(xì)本網編(biān)輯部, 郵箱:skjcsc@vip.sina.com
如果您(nín)有機床行業、企業相關新聞稿件發(fā)表,或進行資訊合作(zuò),歡迎聯(lián)係(xì)本網編(biān)輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業界視點
| 更(gèng)多

行業數據
| 更多
- 2024年(nián)11月 金屬切削機床產量數據
- 2024年11月 分地區金屬切削機床產量數據
- 2024年11月 軸承(chéng)出口情況
- 2024年11月 基本型乘用車(chē)(轎車)產量數據
- 2024年11月 新能源汽車產量數據(jù)
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產量數據
- 2024年10月 軸承(chéng)出口(kǒu)情況
- 2024年10月 分地區金屬切削機床產量(liàng)數據
- 2024年10月 金屬切削機床產量數據
- 2024年9月(yuè) 新能源汽車(chē)銷量情況
- 2024年8月 新能源汽車產(chǎn)量數據
- 2028年8月 基本型乘用車(轎車)產量數據
博文選(xuǎn)萃
| 更多
- 機械加工過程圖示
- 判斷(duàn)一台(tái)加工中心精度的幾(jǐ)種(zhǒng)辦法
- 中走(zǒu)絲線切(qiē)割機床的發展趨勢
- 國產(chǎn)數控係統和(hé)數(shù)控機(jī)床何(hé)去何從(cóng)?
- 中國的技術工(gōng)人都去哪裏了(le)?
- 機械老板(bǎn)做了十多年,為何(hé)還是小作坊?
- 機械行業最新自(zì)殺性營(yíng)銷(xiāo),害人害己!不倒閉才
- 製造業大逃亡(wáng)
- 智能時(shí)代,少談點智造,多談點製造
- 現實麵(miàn)前,國人沉默。製造業的騰飛,要從機床
- 一文搞懂數控車床加工刀具補(bǔ)償功能(néng)
- 車床鑽孔(kǒng)攻螺紋加工方法(fǎ)及工裝設計
- 傳統鑽削與螺旋銑孔加工工藝的區別