床")



軟(ruǎn)體機器人結構機理與驅(qū)動材料研究綜述(shù)
2017-1-12 來源:浙江大學工程力學係 作者:李鐵風 李國瑞 梁藝鳴 程聽雨楊栩旭黃誌
摘要:軟體機器人是(shì)一類新型機(jī)器人,具有結構柔軟度高,環境適應性好,親和性(xìng)強,功能(néng)多樣等(děng)特點(diǎn),有著十分廣闊的研究和應用前景. 智能材料在軟體機器人結構設計及實際應用中扮演了重要的(de)角色,其特殊的(de)驅動(dòng)機製極大拓(tuò)展了軟體機器人的功能. 介紹了(le)軟體機器人的發展和研究現狀,按其應(yīng)用場合及功能總結(jié)了幾種(zhǒng)典型的軟體機器人. 從仿生機理(lǐ)的角度,介紹(shào)了蠕蟲、彎(wān)曲爬行蟲、魚類遊動等幾類仿生運動機理以及其相應的軟體機器人. 還按不同驅動類型將軟體機器人歸納為氣動(dòng)、形狀記憶合金、離子(zǐ)交換聚合物金屬複合材料、介電高彈體(tǐ)、響應水凝膠、化學燃燒驅動等類型. 介紹了軟體機器人的製作方法與工藝,分析了目前(qián)軟體機器人研究(jiū)的主要挑戰,提出對未來研究的展望.
關鍵詞:軟體機器人,智能材料,仿生機理
0.引言
隨著人類生產生活的不(bú)斷發展,機器人學、自動控製理論的不斷進步,人類(lèi)對於機器(qì)人技術(shù)的需求不斷提升. 在人類不宜涉足的(de)極端(duān)和危險的工程環境中,機器(qì)人為人類提供了很大的便利(lì)[1]. 傳統的機器人結構通常由電機、活塞、關節、鉸鏈等構件(jiàn)組(zǔ)裝而成,盡(jìn)管動力足(zú)、功率大、性能成熟,但是也存在很多缺點,例(lì)如笨重(chóng)、安全(quán)係數低、環境適應性差、可靠性低、傳動效率低下、噪聲大等. 自然界生(shēng)物的(de)柔軟的身體、優(yōu)良的靈活性(xìng)和強大的環境適應性為機器人的發展提供了新思路. 軟體機器人以(yǐ)自然界的軟體生物為原(yuán)型,其軀體主要由可以承受大變形的彈性材料構成,可以連續地(dì)變形,具有極高的自由(yóu)度. 通過模仿軟體(tǐ)動物的運動(dòng),這種機器(qì)人可以實現蠕動、扭轉、爬行、遊動等運動形(xíng)式(shì)[2]. 軟體機器人可以根據實際(jì)需要任意地改變自身形狀和尺寸,在更加複雜的環境中作業. 此外,相比於傳統的硬質機(jī)器人,軟體機器人具有更高的安(ān)全性和更好的環境相容性,更加(jiā)適合服務業和醫療領域. 基於(yú)以上優點,軟體機器人在工(gōng)業生產、醫療(liáo)服務、軍事偵察(chá)等領域都有著很好的潛力.
智能材料是指在電、光、熱、催化劑(jì)等外界激勵下表現出特有功能響應的材(cái)料[3-7]. 這些功能響應(yīng)可以是變形、化學(xué)反應、熒(yíng)光等. 近年來,智能材料在機器人領域扮演了重要角(jiǎo)色,例(lì)如氣動、shapememory alloy (SMA)、ionic polymer metal composite(IPMC)、dielectric elastomer (DE)、響應水凝膠機器人等. 目前,智能材料在機器人方(fāng)麵已經得到了很好的(de)應用,由智能材料驅動的軟(ruǎn)體機器(qì)人具(jù)有靈活(huó)、體積小、質量輕、環境適應性好、噪聲低等優(yōu)勢.
本文介紹了軟體機器人的(de)研究現狀、結構機理、驅(qū)動類(lèi)型、結(jié)構成型,分析了其中的技術難點並對未來的研究做出了展望.
1.研究(jiū)現狀
軟體機器人是一種新型的機(jī)器人,是機器人研究(jiū)的拓展. 軟體機器人具有良好的靈(líng)活性、環境(jìng)適應性,在工業生產、醫療服(fú)務、軍事探測等方麵(miàn)具有廣闊的應用前景,軟體機器人已經成(chéng)為了機器人領域的研究熱點. 目前,科學家們對軟(ruǎn)體機器人的研究仍處於(yú)初步階段. 現有的軟體機器人按照結構(gòu)機理可分為:(1) 撲翼式[8-14]、擺尾式[15-17]、噴(pēn)射式水中(zhōng)機器人[18-21],(2) 蠕(rú)動式[22-27]、彎曲爬(pá)行機器人[28-33],(3) 抓取機器(qì)人[34-38] 和(4) 跳躍機(jī)器人[39-40] 等.2007 年,美國國防部高等研究計劃局(DARPA)提(tí)出化學機器人Chembots 的研究(jiū)計劃,並由塔夫斯大學(Tufts University) 承擔. 該化(huà)學機器人結合了機器人學和(hé)材料化學,采用軟材料製成,甚至呈現液(yè)態(tài)狀,可以自由變形,穿越狹(xiá)窄的(de)孔隙[41]. 在歐洲委員會的資助下,歐洲5 個國家(jiā)的研究機構成立了“章魚觸手” 項目組. 該項目於2009 年2 月啟動,2013 年完成,主要是開發軟體水下章魚機器人原型,研(yán)究章魚(yú)機器人的傳感、驅動和相應(yīng)的控製方法[42-44]. 塔(tǎ)夫斯大(dà)學Barry A. Trimmer 研究組在DARPA 的資助下研發的GoQBot 機器人[28] 以彎曲爬行蟲為原型,由形(xíng)狀記憶合金(SMA) 驅動,能夠實(shí)現爬行,翻滾等運(yùn)動形式. 麻省理工學院、哈佛大學和韓國漢城國立大學合作研發的Meshworm 機器人[22] 由形狀記憶合金絲驅動,可以模仿蚯蚓的(de)蠕(rú)動. 哈佛(fó)大學(xué)的GorgeM. Whitesides 研究組研發了一係列氣動軟體機器人[23;34-35;45-46]、內燃驅(qū)動軟體機器人[39-40],可以實現爬行、跳躍、抓取等運動形式. 此外還有康奈爾大學(xué)的集可發光人造皮膚與充(chōng)氣結構為一體的軟體機器人[24] 等(děng). 日本岡山大學的仿蝠鱝軟(ruǎn)體機器(qì)魚也采用氣動的驅動方式[9],可(kě)以(yǐ)實現直行和轉彎(wān). 在響應凝(níng)膠驅動方麵,日(rì)本早稻田(tián)大學采用自震蕩響應凝膠研發了仿生尺蠖[29],可以在無外(wài)界激勵條件下實現周期性伸縮運動. 弗吉尼亞大學仿(fǎng)生工程實驗研發(fā)的仿生蝠鱝機器魚則用IPMC 驅動[10],可以實(shí)現多種運動模式.
2.結構機理
軟體動物的結(jié)構和運動形式為軟體機器人的設計提供了很好(hǎo)的參考. 現有的(de)軟體機器人主要分為爬行機器(qì)人、遊泳機器人、抓取機器人以及跳(tiào)躍機器人. 其中爬行機器人包括蠕動機器人、彎曲爬行機器人,遊泳(yǒng)軟體機器人包括仿(fǎng)生撲翼式軟體機器魚、波動(dòng)鰭(qí)軟體機器魚、擺尾式軟體機器魚、仿生烏賊和仿生水母等(děng),抓取機器人包括抓持式(shì)機器人、電吸附式機器人,跳躍機(jī)器人有單足跳躍機器人、
多足(zú)跳躍機器(qì)人等. 本章將對(duì)各類(lèi)不同結構機理的軟體機器人歸納分類.
2.1 蠕蟲和彎曲(qǔ)爬行蟲
蠕(rú)蟲(chóng)的軀體是典型的流體靜力(lì)骨骼(hydrostaticskeleton) 結構,由表皮、肌肉(ròu)、體液和神經係統組成.以蚯蚓為例,它的肌肉屬(shǔ)於斜紋肌(jī),肌肉構成(chéng)封閉的體(tǐ)腔,內部充滿體液,形(xíng)成靜水骨骼結構. 蚯蚓(yǐn)的肌肉占全身體積(jī)的40%,由環肌和縱肌組(zǔ)成. 當某個體節縱肌收縮時,該體節直徑增大,當環肌收(shōu)縮時,該體節的(de)直徑減(jiǎn)小,長度增大. 蚯蚓就(jiù)是通過(guò)各個體(tǐ)節之(zhī)間的肌肉收縮產生的行進波來實現向前的運動.麻(má)省理工學院(yuàn)仿生機(jī)器人實驗室首先采(cǎi)用SMA 作為驅動器(qì)開發出仿生蚯(qiū)蚓機器人Meshworm[22]. 蚯蚓和Meshworm 的身體結構分別如圖1(a) 和圖1(b)所示(shì).
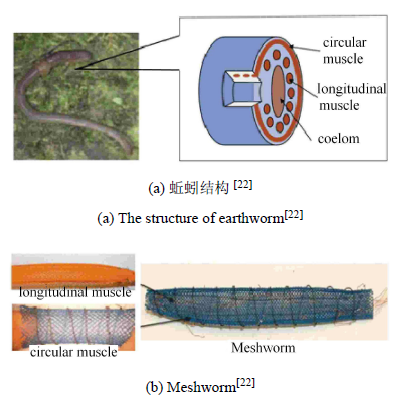
圖1 蚯蚓身體結構和Meshworm
彎曲爬行(háng)蟲的軀體結構也屬(shǔ)於流(liú)體靜力骨骼結構,其肌肉組織包含斜(xié)肌、縱肌以及(jí)小塊肌肉,構成了複雜的肌(jī)肉組織. 通過控製腳和基底之間的壓力變化和(hé)身體的張力,它可以實(shí)現(xiàn)向前的爬行運動和穿越障礙. 塔(tǎ)夫斯大學Barry A. Trimmer 實驗室研發的仿生毛蟲機(jī)器人GoQBot[28],由SMA 驅(qū)動,能夠實現爬行、翻滾等運動形式,彎曲(qǔ)爬行蟲和GoQBot的身體結構分別如圖2(a) 和圖2(b) 所示.
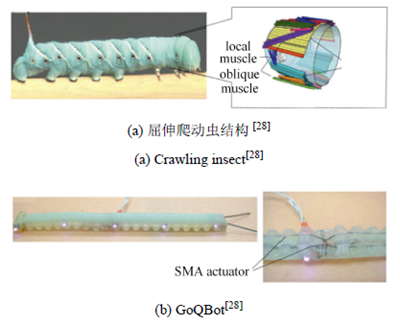
圖2 彎曲爬行蟲和(hé)GoQBot
2.2 水中機器人
按照遊動方式,水中生物的運動方式可以分為撲翼式(蝠鱝)、尾鰭擺動式以及噴射式(烏賊、水母).擺尾式機(jī)器魚通過自身肌(jī)肉的交替伸縮實現(xiàn)身體的擺動,從而帶動尾鰭周期(qī)性擺動獲取水動力實現推進. 擺尾(wěi)式魚類以(yǐ)及麻省理工學院開發的軟體機器魚[15] 如圖3(a) 和圖3(b) 所(suǒ)示(shì). 典型撲翼式(shì)魚為蝠鱝,它們通過胸鰭周(zhōu)期性的撲(pū)動實現推進,撲翼魚類以及北京航空(kōng)航天(tiān)大學開發的仿生機器魚[8] 分別如圖3(c) 和圖3(d) 所示(shì). 水母通過收縮外殼的方式擠壓內腔,可以改變自(zì)身(shēn)內腔的體積,實現噴水推進. 自然界中的水母與弗(fú)吉尼亞(yà)理工大學開發的(de)SMA 驅動的軟體機器水母[18] 分別如圖3(e) 和圖3(f)所示.
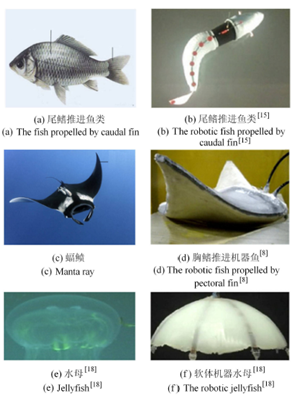
圖3 水中生物原型和軟體水中(zhōng)機器人
2.3 其(qí)他
此外,軟體機器人類型還有跳躍式機器人[39-40]、軟體(tǐ)抓取結構[34-38]、行走機器人(rén)[47-48]以及滾動機器人[49] 等. 這(zhè)幾類機器人的驅動機(jī)製,受到自然界中例如蝗蟲(chóng)和跳蚤蓄力爆發跳躍(跳(tiào)躍式機器(qì)人),章魚多(duō)觸手變形抓取(qǔ)(軟(ruǎn)體抓取結(jié)構),甲殼蟲多足爬行(行走機器人) 等原型啟發(fā). 這些機器人的結構機理與驅動行(háng)為將在下一章中具(jù)體介紹.
3.驅動類型
3.1 氣動軟體機器(qì)人
氣動軟體(tǐ)機器人是指通過在結構(gòu)中充氣,利用氣壓使結構產生(shēng)變形或者運動,從而實現驅動的一類軟體機器人. 哈(hā)佛大學George M. Whitesides 研究(jiū)組研發(fā)出了充氣式(shì)蠕動軟體(tǐ)機器人[23],如圖4(a) 所示. 該軟體機器人身(shēn)長約12.7 cm,通過充氣(qì)產生運動,可(kě)以穿越障礙(ài),進入(rù)狹小空間,並且具備很強的抗衝擊性能. 該團隊(duì)還研發了(le)充(chōng)氣式驅動器[45]、抓取機器人[34-35] 等等. 康奈爾大學的Larson 等[24] 開發了(le)一種拉伸性能很好且具(jù)有電致(zhì)發光功能的人造皮膚,並(bìng)將這種電子皮膚(fū)整合到充(chōng)氣式軟體機器人中,展現(xiàn)了軟體機(jī)器人在運動(dòng)過程中的發光效果見圖4(b). Brown 等[36] 研發的球形軟體(tǐ)抓手,通過抽氣改變氣壓的方式實現抓取,如圖(tú)4(c) 所示(shì).
日本岡山大學研發了氣動軟體機器魚[9],如圖(tú)4(d) 所示. 該機器魚模仿蝠鱝(fèn)的外形和(hé)推進機理. 該機器(qì)魚的軀體材料為矽橡膠,體長為150mm,體寬為170mm,通過氣動閥進行驅動,最大遊動速度可達100mm/s. 北京航空航(háng)天大學機器(qì)人研究所研發了一款氣動仿生蝠鱝機器魚[8]. 該機器魚的主體為矽橡膠,翼展560mm,身長320mm,最大遊動速度為0.5 倍身長每秒. 氣(qì)動機器人具有變形大(dà)、運動靈活等優點,但是需要麵臨氣源、控製等方麵的挑戰.

圖(tú)4 氣動機器人
3.2 形狀記憶(yì)合金軟體機器人
形狀(zhuàng)記憶合金(SMA) 是一種智能合金材料,在加熱時能夠恢複原(yuán)始形狀,消除低溫狀態下所發生的變(biàn)形. 形狀記憶合金的熱(rè)力(lì)耦合行為源於材(cái)料本身的相變,例如熱彈性馬氏(shì)體相變. 在形狀記憶(yì)合金中存在兩種相,高溫相奧氏體相和低溫相馬氏體相.馬氏體一旦(dàn)形成,就會隨著溫度下降(jiàng)而繼續生(shēng)長,如果溫度上(shàng)升它又會減少,以完全相反的過程消失.兩項自由能之差作為相變驅動力,兩項自由(yóu)能相等(děng)的溫度T0 稱為平(píng)衡溫度. 隻有當溫度低於平衡溫度T0 時才會產生馬氏體相變,反之,隻(zhī)有當溫度高於平衡溫度(dù)T0 時才會發生逆相變. 在SMA 中,馬氏體(tǐ)相變不僅由(yóu)溫度(dù)引起,也可以由(yóu)應力引起,這種由應力引起的馬氏體相變叫做應力誘發馬氏體相變(biàn),且相變溫度同應力正相關. 形狀記憶合金可以用於智(zhì)能材料驅動器中.
Menciassi 等[25] 首先將SMA 驅動(dòng)器應用於蠕蟲的仿生機器人中,如圖5(a) 所(suǒ)示. Menciassi 參考(kǎo)了(le)蚯蚓的運動(dòng)機製,將SMA 彈簧嵌入矽橡膠外殼(ké)中並串聯成(chéng)竹節狀,配置(zhì)好各節的驅動電流,運動速度可達0.22mm/s. 模仿生物爬行的軟(ruǎn)體機器人還有Du 等研發的3 種模式運動機器人(rén)[30],GoQBot 機器人[28],Meshworm 機器人[22]. Kim 等[11] 研發了(le)一種通過SMA 驅動的仿生海龜,如圖5(b) 所示. 它的最高(gāo)遊動速度為(wéi)22.8mm/s. 此外,該研究組研發了一

圖5 SMA 驅(qū)動機器人
款新型(xíng)的SMA 仿生(shēng)龜[12],其(qí)最(zuì)大遊動速度為11.5 cm/s. Wang 等[16] 設計了一種SMA 驅動的柔性鰭單元(yuán),如圖5(c) 所示,並將其應用於(yú)仿(fǎng)蝠鱝機器人[13] 中,如圖5(d) 所示. 文獻[18-19] 模仿水母的運動,製作了可做沉浮運動的水下機器人. 此外,SMA還被應用於攀爬機(jī)器人[31],仿生飛行器(qì)[50-51],機器人麵部表情驅動[52-53] 等.形狀記憶合金驅動的(de)機器人具有大驅(qū)動(dòng)力、大驅動位移等優點,但是也(yě)存在溫度(dù)難以控製、驅動頻率低等問題(tí).
3.3 IPMC 軟體機器人
IPMC 的全稱是(shì)離子(zǐ)交換(huàn)聚合物金(jīn)屬複合材料,是(shì)一種電致變形的智能材料(離子型). IPMC 材料由Nafion 鋰子交換薄膜和電極組成. 在含水狀態(tài)下,聚合物薄膜中的陽(yáng)離(lí)子(zǐ)(例如鈉離(lí)子和鈣離子)可以自由(yóu)移動,陰離子固定在碳鏈中不能移動. 在IPMC 電極的兩端施加上電壓時(shí),在電極之間會產生電場. 在電場的(de)作用下,水合的陽(yáng)離子向負極移動,而陰離(lí)子的位置固定不變. 從而導致IPMC 的負極溶(róng)脹,正極收縮而導致IPMC 彎曲變形.IPMC 具有變形靈活、可重複,大位移,低電(diàn)壓驅動,響應速度快等特點. 基(jī)於IPMC 的這些特點,可以廣泛(fàn)地用於智能材料機器人(rén)的(de)驅動器中,尤其適用於水環境(jìng)機(jī)器人,如仿生機器魚、機器水母等.
Hubbard 等[14] 將IPMC 應用於(yú)仿生機器魚中,用於驅動機器魚的胸鰭和尾鰭. 該機器魚的最大(dà)遊(yóu)動速(sù)度為28mm/s,如圖6(a) 所示. Shen 等[17] 模仿鯨魚的遊動方式,使用IPMC 尾鰭研發了一款(kuǎn)仿生機器魚,並研究了其水動力性能,如圖6(b) 所示. 弗吉尼亞大學仿(fǎng)生工程實驗室(shì)研發了一款IPMC 驅動的仿生蝠鱝(fèn)機器(qì)魚[10],如圖6(c) 所示. 該機器魚的胸鰭由兩側的4 根IPMC 鰭條驅動,身長80mm,翼展180mm,最大遊動速度為4.2mm/s. 弗吉尼(ní)亞理工大學將IPMC 驅動器嵌入聚烯烴薄膜(mó)中,開發出透(tòu)明軟體水母[20],如圖6(d) 所示. 該水母的直徑為164mm,高為50mm,重量為11 g,遊動速(sù)度(dù)為1.5mm/s. 此外,伊朗沙(shā)力夫理工大學研發了一款IPMC 驅動的滾動機(jī)器人[49],如圖6(e) 所示. 德克薩斯(sī)A&M 大學研發了一款IPMC 驅動的行(háng)走機器人[47],如圖6(f) 所示. IPMC 驅動的機(jī)器人具有大輸出位移、運動靈活等優點,而其主要不足有輸出力較小,響應頻率低、材料需要液(yè)體環境等.

圖6 IPMC 機器人
3.4 介電(diàn)高彈體軟體機器人
介電高彈體(DE) 是一種典型(xíng)的(de)電致變形智能軟材料(電子型(xíng)). 聚丙烯酸類材(cái)料是一(yī)種典型的介電高彈體材(cái)料,在介電高彈體薄(báo)膜的兩側覆蓋柔性電(diàn)極,並施加驅動電壓時,介電高彈體薄膜在電場力(lì)的作用下(xià)產生變形,導致厚度減小,麵積擴張. 介電高(gāo)彈體具有彈(dàn)性模(mó)量低、質輕、能量密(mì)度大、響應(yīng)速度快(kuài)的優點. 介電高彈體可用於軟體機器(qì)人驅動、柔性(xìng)傳感器、智能穿戴(dài)設備以及能量采集等.浙江大學工(gōng)程力學係、浙江省軟體機器人與智能器件研究重點實(shí)驗室研究組基(jī)於介電高彈體的(de)力電耦合特性,通過利用力電失穩實現(xiàn)了材料的極大電致變形[54],並可振動調頻,能用於智能結構的驅動[55].此外,該研究小組還(hái)參考了彎曲爬行蟲,海星等(děng)無脊椎動物,研發了一種小型的(de)智能結構[32],如圖7(a) 所示. 以該結構作為基本模塊,可以製成多種形狀的小型機器人. 在不同(tóng)的預拉伸狀態下以及不同的電壓的驅動下,這種機器人的運動幅度也會(huì)隨之改變. Kofod 基於介電高彈體材料做(zuò)了三角狀抓(zhuā)手[38],可以(yǐ)抓起輕質的柱狀物體,如圖(tú)7(b)所示. Jung 等[26] 以蠕蟲為(wéi)靈感,做成以介電材料為單元的驅動器,再以6 個基(jī)本單(dān)元為一組(zǔ),做成一個二級的圓形單元,最後這種二級的(de)圓(yuán)形(xíng)單元可以連接成任意長度(dù)的(de)蠕蟲機器人,可(kě)以(yǐ)實現1mm/s的爬行速度,如圖7(c) 所示. Choi 等[56] 將多層介電材料薄膜製成的驅動器作為基本結構單元,以這種單元為基礎組(zǔ)裝(zhuāng)成管狀(zhuàng)的智能機器(qì)人(rén),如圖7(d)所示(shì). Pei 等[48] 基於介(jiè)電高彈(dàn)體材料,做成圓柱形驅動器單元,並組裝成六足行走機器人或(huò)者首尾連接的蠕蟲機器(qì)人,如圖7(e) 所示. Zhao 等[57] 研發了一種撲翼結構,這種馬鞍形狀的介電材料的驅動器在5 000V,3 Hz 的驅動(dòng)電(diàn)壓下,可以(yǐ)實現大於180。的角度變化,如圖7(f) 所示. 這種撲翼結構也為空中飛行驅(qū)動器提供了一個很(hěn)好的(de)參考. 此外,Conn 等[27] 研發了一種結合氣動與電動並以介電高彈體為材料(liào)的蠕蟲機器人. 這種機器人是以介電高彈體薄膜封裝的一個圓筒形結構為單(dān)元,並且可(kě)以將這些單元連接成不同長度的(de)機器人. 該機器人在充氣後,介電薄膜進入工作狀態,施加電壓後可以通過底部的運動結(jié)構產生的(de)摩擦力(lì)前進. Branz等[58] 研發了一種(zhǒng)以介電高彈體為基本材料的雙

圖7 DE 驅動機器(qì)人
軸(zhóu)機器人(rén),這種(zhǒng)機(jī)器人在水平x-z 方向和豎直x-y 方(fāng)向分別有兩個圓柱形的軸,在電的驅動下,介電薄膜會發生形變,帶動兩個軸運動,從而實(shí)現前進. Shintake等[37] 開發(fā)了一種電吸附式的介(jiè)電(diàn)高彈體軟體抓手,可以抓起82.1 g 的物體. 介電高彈體(tǐ)機器(qì)人具有大驅動力、大驅動位移等優點,但也麵(miàn)臨著驅動電壓(yā)高等挑戰.
3.5 響(xiǎng)應水凝膠軟體機器人
水凝膠是由親水性的功能(néng)高分子,通(tōng)過物理(lǐ)或化學作用交聯形成三維(wéi)網絡(luò)結構,吸水溶脹而形成.響應水凝膠指能(néng)夠對外部(bù)環(huán)境的(de)變化產生響應性變化的(de)水凝膠,如一(yī)些水凝膠能因外界溫度、pH 值、光電信號、特(tè)殊化學分子等的微小變化,而產(chǎn)生(shēng)相(xiàng)應的物理結構或化學結構(gòu)的變化. 如一類具有低臨界相轉變溫度(LCST) 的溫敏水凝膠,其(qí)在溫(wēn)度低於LCST 時,表現為親水性,而高於LCST 時相轉變為疏水性. 水凝(níng)膠高分子網(wǎng)絡的相轉變(biàn)使得水凝膠中的水分大量出入其中(溫度升高縮水,降(jiàng)低吸水),從而使得水凝膠產生體積等形態(tài)變化. 又例(lì)如一類具有對酸堿度敏感的水(shuǐ)凝膠,其高分子(zǐ)網絡中含有可(kě)電離的(de)陰離子基團(羧基、磺(huáng)酸基(jī)等) 或陽離(lí)子基團(氨(ān)基等),外界pH 值的改變影響這些基團的電離情況,使得它(tā)們與水分(fèn)子的結合情(qíng)況也發生相應(yīng)的(de)改變(biàn),從而使水(shuǐ)凝膠的體(tǐ)積(jī)形態隨著pH 值的改變而發生變(biàn)化. 由於智能水凝膠能夠隨外(wài)界環境(jìng)變化,而產生(shēng)形變(biàn),其可以作為智能驅動(dòng)材料應用於柔性機器人驅動等領域[59].
Nakamaru 等[29] 以凝膠為材料,研發了一種外形簡單,有著類似蠕蟲的運動模式的仿生機器人. 這種(zhǒng)機器人(rén)在不改變外界驅動方式和刺激的情況下可以自己通過自(zì)震蕩的方式移動,如圖8(a) 所示. Morales等[33] 研發了一種以水(shuǐ)凝膠為基底的片狀驅動器. 該驅動器分為兩部分,分(fèn)別作為(wéi)機器人的兩隻腳(jiǎo),這兩(liǎng)隻腳分別為陰離(lí)子腳和陽離子腳,通過改變電極的方向使機器人產生不同方向的(de)形變從(cóng)而使其移動,如圖8(b) 所示. Lee 等[60] 同(tóng)樣是以水凝膠作為基本(běn)材料,以自然界(jiè)中的捕蠅草為靈(líng)感,製(zhì)備了一種表麵具有微流道(dào)的微型(xíng)機器人,可以通過機器人(rén)表麵的(de)微流道吸水和失水時所產生的表麵形變來使其運(yùn)動.此外,Li 等[20] 用pH 值響應水凝膠(jiāo)開發了一款軟體水母(mǔ),該水母為磁驅動. 水凝(níng)膠機器人能夠通過自身化(huà)學反應實現運動,但是麵臨驅動力小、難以精確控(kòng)製的挑戰.
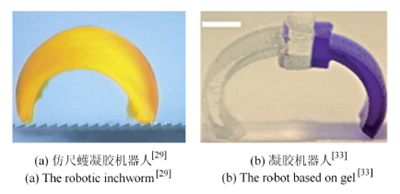
圖8 水凝膠機器人
3.6 內燃(rán)軟體機器人(rén)
Shepher 等[39] 研究組研發了一種三角狀的有機彈性體機器人. 該機器人以甲烷與氧氣燃燒反應使氣體體積膨脹(zhàng)為(wéi)驅動機製,在(zài)分別通入純氧和甲烷混合(hé)反應之後,這種機器人可發生形變並且跳躍(yuè),最高可達到跳離(lí)地麵300mm (30 倍身高),如圖9(a)所示. 同樣是以跳躍為運動形(xíng)式,Bartlett 等[40] 應用三維(wéi)打印技術製造了一種內燃驅動機(jī)器人. 該(gāi)機器人也(yě)是以(yǐ)化(huà)學(xué)反(fǎn)應放能作為驅動機(jī)製,丁烷和氧氣在一個三角狀的密閉腔室裏發生反應,使這個小型機器人跳(tiào)躍,並且可以通過給底部的腳分別充氣實現(xiàn)定向的跳躍,如圖9(b) 所示. 內燃機器人具有驅動力大,運動(dòng)幅度(dù)大的優勢,但是存在著控製難度大的挑戰.
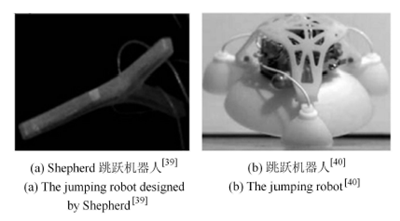
圖9 內燃機器人
4.結構成(chéng)型
軟體機器人的製造(zào)包括了機器人本體結構(gòu)製造、驅動材料製造、柔性電子電路製造. 文獻[2, 61]總結了軟體機器人的製造工藝,包括了形狀沉積、納米壓印、激光消融(róng)、微注射成型、3D 打印等(děng).圖10 為形狀沉(chén)積法(shape deposition manufacturing,SDM) 的流程示意圖. Merz 等[62] 早在1994 年就詳述了SDM 的具體(tǐ)實(shí)施步驟. 21 世紀初,MarkCutkosky 研究組最(zuì)早將SDM 應用(yòng)於機器人的結構(gòu)製造[63]. 運用形狀沉積法,可以把傳感器、電路組件嵌入結構中,製作柔(róu)軟的結(jié)構並使其具(jù)備多種功能.
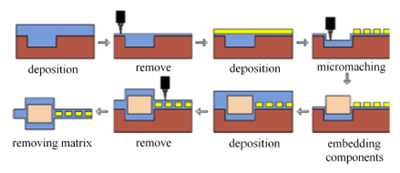
圖10 SDM 工藝流程圖
介電高彈體驅動器涉及的主要製造工藝包括聚合(hé)物薄膜的製作、薄(báo)膜的(de)預拉伸、電(diàn)極的集成和封裝等. 如圖11 所示,薄膜可用注模、旋(xuán)塗、3D 打印製造或使用(yòng)膠帶(VHB, 3M),使用(yòng)掩模、轉印或濺射沉積法使電極均勻(yún)覆蓋於薄(báo)膜兩側. 柔性(xìng)電極的集成是DE 驅動(dòng)器製造的關(guān)鍵步驟(zhòu). 在可伸展電子(zǐ)係統中,結構發生變形(xíng)如拉伸、扭轉(zhuǎn)、折疊時,係統的電力(lì)和機械耗散應盡可能(néng)小. 這就要求電極有一定的柔順度、良好的傳導率(lǜ)甚至特定的外(wài)觀. 使用(yòng)柔性電極(jí)在(zài)介電高彈體表麵製備具有特定(dìng)形狀的導電區域(yù),可以實現通過二維平麵(miàn)製造對智能(néng)結(jié)構三維形狀的驅(qū)動控製(zhì)[64].
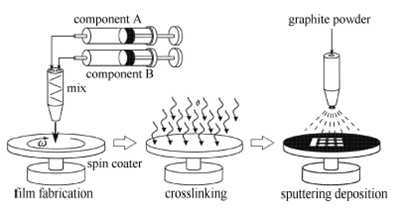
圖11 DE 驅動(dòng)器製造流程
Rosset 等[66] 綜述了應用於DE 驅動器的(de)柔性電極(jí)及其(qí)集成方法. 常用的柔性電極有石墨粉、碳(tàn)膏、銀納米線(xiàn)等. Keplinger 等[67] 將水凝膠(jiāo)作為電極應用於DE 驅動器製造,製造的驅動器高度透明. 可運用於對外觀有相關需求的地方.以Gorge M. Whitesides 為主發展的軟刻(kè)蝕(softlithograph) 技術[68] 使用彈(dàn)性模(mó)板為微圖案的轉移中介,包括了微接觸印刷、近場光刻(kè)蝕、納米壓(yā)印等. 彈性模板是軟刻蝕技術的核心元件,聚二甲基矽氧烷是優良的製備材料,其具有彈(dàn)性優(yōu)良和不與其他(tā)材料粘連的特點,能實現在曲麵上(shàng)製作圖(tú)案. 文獻[23]和文獻[39] 中的軟體機器人製造都采用了軟刻蝕方法.
3D 打印(3D printing) 也可稱為增材製造(zào)(additivemanufacturing, AM),具有數字製造、直接製造、快速製造(zào)等優點. 目前已經實現商(shāng)品化的工藝主(zhǔ)要有光固化打印、選(xuǎn)擇性激光燒結打印、熔融沉積打印.利(lì)用3D 打印已用(yòng)於製造軟體機(jī)器(qì)人的軀體[40;69-70].Rossiter 等[71] 采用噴射打印方式(shì),利(lì)用UV 光逐層(céng)照(zhào)射固化聚丙(bǐng)烯酸樹(shù)脂得到一塊(kuài)厚度約90 1m 的可驅動的DE 薄膜. Carrico 等[72] 采用熔融沉積技術製造了IPMC 薄片(圖12),並與商(shāng)用IPMC 進行了性(xìng)能比較. Peele 等[73] 采用(yòng)光固化技術製造了一個氣(qì)動模塊.
5.關鍵技術與挑戰
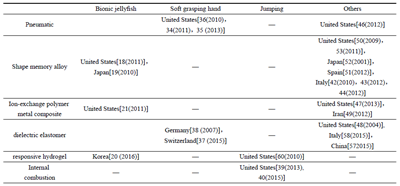
表1 和表2 從驅(qū)動方式、結構機理以及研(yán)發機構所在地的角度歸納了多種(zhǒng)已有的軟體機器(qì)人. 軟(ruǎn)體機器人(rén)的研究目前尚處於起步階段,仍有很多難題需要去解決,包括能源供給、運動學建模、動作控製(zhì)及通訊傳感(gǎn)等. 首先,軟(ruǎn)體機器人具有極高的自由(yóu)度,因此在建(jiàn)模與控製方麵(miàn)與傳統的機器人有所不同,難以實現(xiàn)精確建模與控製. 目前,在軟(ruǎn)體機器人動力學建模中,主要通過(guò)結(jié)構功能分類進行多(duō)體離散(sàn)化,通過將(jiāng)實驗與(yǔ)模型驗證,並充分考慮控製(zhì)對步態的影響,從而優化機器人構造(zào),提升性能[74-76]. 開
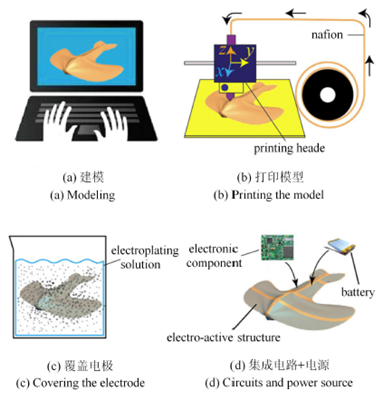
圖12 熔融沉積技術製造IPMC[72]
發適用於軟體機器人大變形、高自由度等(děng)特(tè)點的控製策略(luè)及建模(mó)方法(fǎ)對(duì)其基礎研究及實際應用非常關鍵. 其次,軟體機器人的進步(bù)在很大程度上依賴(lài)高性能的智能軟材料(liào)製備及結構成型. 需要(yào)研發高能量密(mì)度(dù)、高效率、可大變形驅動、寬(kuān)頻率驅動並且易於成型的智能軟材料(liào). 最後,研究開發麵向軟體機器人應用的(de)能源(yuán)供應裝置也是其(qí)發展的關鍵. 例如氣(qì)動式軟體機器(qì)人、電源以及氣源的(de)質量較大,影響了機器人的運(yùn)動(dòng). 例如介電高彈體驅動的軟體機器人,小型高壓電源的可靠(kào)性至關重要. 軟體機器人的電源要求延展性好、輕(qīng)質、可攜(xié)帶.
表1 各類軟體機器人按結構形式、驅動方式及研究國家統計表(I)
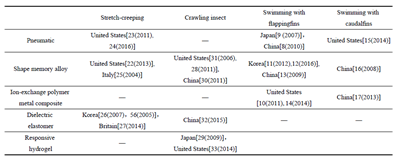
表2 各類(lèi)軟體機器人按結構形式、驅動方式及(jí)研(yán)究國家統計(jì)表(II)
6.展(zhǎn)望(wàng)
由於軟體機器人要求通訊、控製電路等(děng)可以承受大變形,因而柔性電子(zǐ)的許多研究成果可以大量應用在軟體機器(qì)人結構中,提升其(qí)性能. 而軟體機器人的(de)研究同時也對柔性電子技術提出了新的應用要求,並開拓了(le)新的應(yīng)用領域. 軟體機(jī)器人因為(wéi)其複雜的、軟體化的結構特性,從而十(shí)分適合使用三維打印成型技術製備,同時也為三維打印成型技(jì)術(shù)提供了新的應用領域(yù).
未來軟體機(jī)器人的研究及應用,將(jiāng)利用到多個學科的前沿(yán)成果(guǒ),以實現高柔軟性、多功能(néng)化、高親和度等性(xìng)能特(tè)點;利用柔性電子(zǐ)、三維打印等結構與成型技術,使其易於製造,從而廣泛應(yīng)用於各類工程、醫療、軍事等(děng)領域.
投稿箱:
如(rú)果您有機床行業、企業相關新聞稿件(jiàn)發表,或進行資訊(xùn)合作,歡迎聯係本網編輯(jí)部, 郵箱:skjcsc@vip.sina.com
如(rú)果您有機床行業、企業相關新聞稿件(jiàn)發表,或進行資訊(xùn)合作,歡迎聯係本網編輯(jí)部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業界視點
| 更多
牌調查")
行業數據
| 更多(duō)
- 2024年11月 金屬切削機床產量數據
- 2024年11月(yuè) 分地區金屬切削機床產量數據
- 2024年11月 軸(zhóu)承出口情況
- 2024年11月(yuè) 基本型乘用車(轎車(chē))產量數據
- 2024年11月 新能(néng)源汽車產量數據
- 2024年11月 新能源汽(qì)車銷量(liàng)情況
- 2024年10月 新能源汽(qì)車產量數(shù)據
- 2024年10月 軸承出口情(qíng)況(kuàng)
- 2024年10月 分地區(qū)金屬切削機床產量數據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽(qì)車產量數據
- 2028年8月 基本型乘用車(轎車)產量數據