


基於(yú)杠杆模式施載的圓弧刃光(guāng)柵刻畫刀具刃磨機床研製
2017-5-17 來源:中國科學院長春光學精密機(jī)械與物理研究所 作者:吉日嘎蘭圖 李曉天 劉 凱(kǎi) 張善文 巴音
摘要:采用圓弧刃光柵刻畫刀具,實(shí)現在線換刃技術是解決光柵刻畫刀具使用壽命(mìng)問題的一種有效的途徑。在線(xiàn)換刃圓弧光(guāng)柵刻畫(huà)刀具對刃口質量(liàng)及精度要求高,刃磨(mó)製作工藝(yì)難度大,且國(guó)內外市場幾無此類刃磨設備,需要自行設計製作圓弧刃光柵刻畫(huà)刀具刃磨機床。在圓弧刃光柵刻畫刀具刃(rèn)磨(mó)試驗設備設(shè)計製作及圓弧刃光柵刻畫刀具刃(rèn)磨製作工藝研究基礎(chǔ)上,針對圓弧刃光柵刻畫(huà)刀具的刃磨(mó)特點,設計新型的基於(yú)杠杆模式施載的圓弧刃光柵刻(kè)畫刀具(jù)刃磨機床;根據傳統機床的設計程序,對刃磨機床的功能、總體設計及詳細結構設(shè)計展開研究,並對施載與微進給機構(gòu)進行了振動分析,排除了(le)出現共(gòng)振的可能性。最後完(wán)成了該機床的機械(xiè)裝調,並刃磨製作一把圓弧刃光柵(shān)刻畫刀具,其定向角∠D=63 °,刀尖角∠J=90 °,刃(rèn)圓半徑R=8.56mm,在460 倍體視顯微鏡下觀察(chá)無崩口等缺陷(xiàn),刃口弧線清晰可見。刀具檢測及觀測結果表明,所設計的圓弧刃刀具刃磨機床適用於圓弧刃光柵刻畫刀具的刃磨製作,所采用的分析及設計方法(fǎ)對圓弧(hú)刃刀具刃磨機床及其他機床的設計和研製具有實際指導意義。
關鍵詞:杠杆模式(shì);圓弧(hú)刃;光柵刻畫刀;刃(rèn)磨機床
0.前言(yán)
傳統的機械刻畫光柵是劈型刀刃通過光學基底上的金屬鍍(dù)層擠壓(yā)、擦光過程,將鍍層表麵加工成(chéng)型(xíng)為周期性V型刻槽的過程,且整個加工工藝過程中不產生切屑[1-2]。一直以來,在光柵刻畫過程中,刀具的(de)壽命(mìng)極為重(chóng)要[3-5],雖然刀具材料(liào)選用世界上最硬的天然金剛石,但是劈型刀具的(de)單次刃的壽命也會具有很大的(de)局限性。采用圓弧刃光柵刻畫刀具,實現在線換刃技術是解決光柵刻畫刀具使用壽命問題的一(yī)種有效的途徑。可在線換刃圓弧光柵刻畫刀具(jù)對刃口(kǒu)質量(liàng)及精度要求高,刃磨製作工藝難度大,而且國內外市場幾無此類刃磨設備,需要自行設計製作(zuò)圓弧刃光柵刻畫刀具刃磨機床[6-7]。
近(jìn)年來,中國科學院長春光學(xué)精密機械與物理(lǐ)研究所試製過圓弧刃光柵刻畫刀具刃(rèn)磨試(shì)驗設備,並對圓(yuán)弧刃光柵刻畫刀具刃磨製備工藝進行了一(yī)係列的研(yán)究,尤其是國家重大科研裝備研製項目(大型高精度衍射(shè)光柵刻(kè)畫係統研製),其驗收指標為(wéi)420mm×650 mm 的(de)大尺寸、高精度衍射光柵的刻畫製(zhì)作,因此,將圓弧刃光柵刻畫刀具的研製當成必須(xū)突破的一項關鍵技術。
鑒於此,本文在圓弧刃(rèn)光(guāng)柵刻(kè)畫刀(dāo)具刃磨試驗(yàn)設備設計製作及圓弧刃光柵刻畫刀具刃磨製作工藝研究基礎(chǔ)上(shàng),針對圓弧(hú)刃光柵刻畫刀具的刃磨特點,設計(jì)了新型的(de)基於杠杆模式施載的圓弧刃光柵刻畫(huà)刀具刃磨機床;根據傳統機床的設計程(chéng)序,對刃磨機床功能進行分析,對(duì)總體及詳細結構(gòu)進行設計(jì),並對施載與微(wēi)進給機構進行了振動分析(xī),排除了(le)出現共(gòng)振的可能性(xìng);最終設計製造了(le)基於杠杆模式施載的(de)圓弧刃光柵刻畫刀具刃磨機床,並刃磨出一(yī)把合格的圓弧刃光柵刻畫刀具。
1.刃(rèn)磨機床總體設計
1.1 刃(rèn)磨機床功能及性能參數(shù)
圓弧刃光柵刻畫刀(dāo)具刃磨機床的設計目的是為了實現在線換刃(rèn)光柵刻畫刀具的(de)刃磨製作。圓弧(hú)刃光柵刻畫刀具的圓弧刃是由兩(liǎng)個相對(duì)的圓錐麵同心(xīn)相交而成的(de),其刃(rèn)磨方(fāng)式見圖1。從示意圖(tú)中可以看出,圓(yuán)弧刃光柵刻畫刀具的定向角(jiǎo)及(jí)非定向角是由圓錐半角決定的,圓錐麵同心相交而(ér)構成的圓弧半徑決定了圓弧刃光柵刻畫刀具刃圓半徑。圓錐麵研磨過程中其圓錐半角始終(zhōng)不變,即定向角或非(fēi)定向角固定不(bú)變。開始研磨(mó)圓錐麵(miàn)時,根據刀具結構參數,確定(dìng)所要研磨圓錐麵的圓錐半角θ,並將(jiāng)往返擺(bǎi)動軸繞O'軸(zhóu)旋轉(zhuǎn)至與磨盤形成(chéng)θ 角。
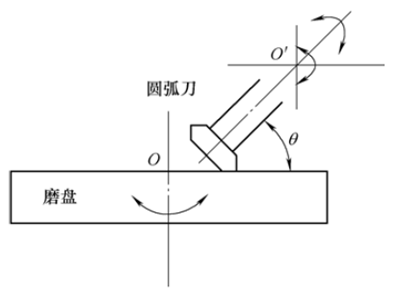
圖1 圓弧刃光柵刻畫刀的刃磨方式
圓弧刃光柵(shān)刻畫刀具刃磨過程是兩個(gè)圓錐(zhuī)麵的高精度、自動刃磨過程。根據傳統機床設計方法,圓弧刃光柵刻畫刀具刃磨機床的設(shè)計也是由機械係統及控(kòng)製係統(tǒng)組成[8-11],本文(wén)設計的刃磨機床所需(xū)實現的功能(néng)見(jiàn)圖2,具體說明如下。
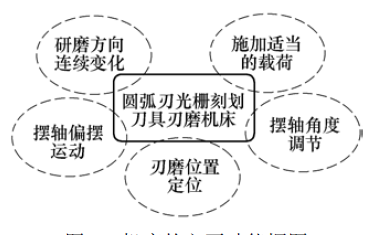
圖(tú)2 機(jī)床的主要功能框圖
(1) 金剛石晶體具有各向異性,圓錐麵上各(gè)點的磨削率不盡相同,因此需要設計平穩且可實現(xiàn)刃磨軌跡連續變化的磨盤運動方案,保(bǎo)證金剛石(shí)圓(yuán)錐麵的均勻、高質量的刃磨。
(2) 金剛石刀具的(de)刃磨需要施加適當的載(zǎi)荷(hé),設計合理的施載模式對金剛石(shí)刀具的高精度刃磨極其重要。載荷大小及施載模式是決定刀具刃磨效率及刃磨質量的一(yī)個關鍵因素。施(shī)載與微進(jìn)給技術是刃磨機床設計的難點,也是本文主要研究的關鍵技術之一。
(3) 圓弧(hú)刃(rèn)光柵刻畫刀具的刃(rèn)磨需(xū)要設(shè)計一個平穩的擺動(dòng)運動機構,擺(bǎi)動中心為雙圓錐中心。刃磨機床通過往返擺動運動來實現金剛石刀具圓錐麵的研磨,擺動運動機構的精度及穩定性直接影響圓弧刃的質量及精度。
(4) 根據光柵刻畫(huà)刀具的定向角(jiǎo)及刀尖(jiān)角參數選取範圍,圓弧刃光柵刻畫(huà)刀具刃磨機床的往返擺動軸與磨盤(pán)的夾角設計為10°~80°範圍內可調。圓弧刃光柵刻畫刀具刃磨(mó)對機床主要性能參數(shù)的要求如下。
(1) 磨盤運動主軸係統(tǒng):總端麵(miàn)跳動≤1 μm,采用氣浮軸(zhóu)承(chéng)結(jié)構,主軸轉速(sù)0~5 000 r/min,可正反轉(zhuǎn)。
(2) 施載模式及大小:施載範(fàn)圍0~20 N,采用重錘(chuí)模式。
(3) 擺動運動機構:徑向跳動≤2 μm,端麵跳動≤2 μm,轉速0~6 r/min,可實(shí)現0~360°內往返偏擺,采用機械主軸結構。
1.2 刃磨機床總體設計
在研究圓弧刃光柵刻畫刀具刃磨機床的功能及其刃磨工藝方式的基礎上,對圓弧刃(rèn)光(guāng)柵刻畫刀具刃磨機床進行了(le)總體設計,如(rú)圖3 所示。主要由磨盤係(xì)統、刀架係統、坐標係統及施載與微進給係統組成。
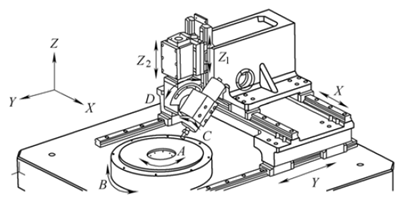
圖3 刃磨機床運動方式
1.2.1 磨盤係統設計
金(jīn)剛石在磨盤的固定位置研磨時,很容易出現同(tóng)一個方向的較深研磨劃(huá)痕。因此,在傳統劈型刀具的刃磨過程中,通常采用刀具在磨盤(pán)上高速(sù)研磨(mó)的同時,另加一個與研磨方向成(chéng)一(yī)定角度的手動拋光工序的方法(fǎ),獲得無劃痕的金剛石研磨麵。然而,可在線換刃圓弧刃光柵(shān)刻畫刀具的圓弧刃精(jīng)度要求高,手動拋光工序已滿足不了要求。另外,金剛石晶體的各向(xiàng)異性使得圓錐(zhuī)麵上各點的磨削率不盡相同,且(qiě)刀具偏擺軸的幾度範圍內的小轉動都能(néng)引起金剛石圓錐麵上易磨損方向的較大角度的變化[12-14]。經研究(jiū)刀具在磨盤上的位置連續(xù)變動或磨盤(pán)的行星(xīng)運(yùn)動均可滿足(zú)圓錐麵上(shàng)的研磨軌跡連續變化要(yào)求,但是(shì)考慮到刃磨機床三個坐標(biāo)係統的設計(jì)精度較低,且所涉及機構結構(gòu)較複雜,刀架係統、微進給係統、施載係統(tǒng)等的質量較大,增加慣(guàn)性;轉換坐標或電動機正反轉轉換時容(róng)易引起刀具振動,影響刃磨(mó)質量。
因此,圓弧刃光柵刻畫刀(dāo)具刃磨機床采用了(le)自轉與公(gōng)轉相結合(hé)的行星運動研磨方案,具體實現方法是在1 100 mm×1 100 mm×200 mm 花(huā)崗岩平台上安裝固定行星氣浮(fú)軸係的外套,將磨盤氣浮主軸外套安裝於行星氣浮軸可調偏心位置(zhì)上,整(zhěng)體(tǐ)結構屬(shǔ)立式結構(gòu),最終實現研磨主軸(A)通過公轉軸(B)實現行星運動軌跡;磨盤主軸額定轉速3 000 r/min,公(gōng)轉軸額定轉速100 r/min。
1.2.2 刀架係統設計
刀架係統是由低速偏擺的(de)往返擺動軸(C)及刃磨角度調整機構(D)組成的,偏擺速率範圍要求在1~6 次/min以(yǐ)內。從(cóng)低速功率及穩定性考慮,采用了德國FAULHABER集團無刷(shuā)伺服電(diàn)動機,內置減速比為66:1 的微型減速機,最終(zhōng)扭矩2.6 N·m,通過柔性聯軸(zhóu)器連接到徑向跳動(dòng)及軸向跳動都優於2 μm的機械主軸,實現刀(dāo)具刃磨時的往返擺動運動[15]。刃磨角度調整機構是由高精度編碼器、蝸輪蝸杆減速器、微型步進電動機及(jí)鎖緊機構組成的係統,可實現(xiàn)刃磨角度高精度定位及調整。圓弧刃光柵刻畫刀具刃磨過程中所需的偏擺角度範圍主要由圓弧刃刀(dāo)具設計參數,如刃圓半徑、刀(dāo)具定向角及刀尖角所決定。
1.2.3 坐標係統設計
圓弧刃光柵刻畫刀具刃磨機床的坐標係統主要由(yóu)X、Y、Z軸組成,其中(zhōng)Z軸分解為Z1和Z2軸(zhóu);X、Y、Z1軸的運動精度要求不高,主要是用於刀具刃磨位置調整及刃磨質量觀測,而Z2軸的精度(dù)要求高,用於刀具刃磨時(shí)的微進給。圓弧刃光柵刻(kè)畫刀具刃磨機床的Z軸是由Z1軸向位置(zhì)調整機構和Z2軸向微進給係統組成。Z1軸向位置調整機構采用了精密滾珠直(zhí)線導軌及小導(dǎo)程(3 mm)精密滾珠絲(sī)杠結構,驅動方(fāng)案選用了德國FAULHABER集團無刷伺服電動機,內置減速比為156:1 的(de)微型減速機,最終扭矩達5.3 N·m。Z1軸向(xiàng)位置(zhì)調整機(jī)構主要(yào)是用於(yú)圓錐麵研(yán)磨時較大幅度的調整圓錐半角,從(cóng)而使磨盤(pán)與刀具間(jiān)距處於微進給範圍內,並可實現定位可鎖緊。
1.2.4 施載(zǎi)與微進給係統設計
光柵刻畫刀具是一個(gè)非(fēi)常精密的刀具類型,傳統的(de)光柵刻畫刀具是手(shǒu)工刃磨製作的劈型刀,主刃線是由兩個(gè)平麵研磨相交而成(chéng),手工(gōng)刃磨金剛石劈型(xíng)光(guāng)柵(shān)刻畫刀具時可人工施(shī)加一定的研磨載荷,同時人手能滿(mǎn)足刀(dāo)具刃磨時的刀具隨磨盤(pán)轉動時(shí)的Z向的(de)隨動性,但(dàn)是手工刃磨刀具很大程度上依賴(lài)於手工刃磨經驗,且手工刃磨方法無法實現高精度圓弧(hú)刃光柵刻畫(huà)刀具(jù)刃磨。因此,設計圓弧刃光柵刻畫刀具刃磨機床時需要(yào)設計與(yǔ)其(qí)刃磨工藝相(xiàng)應的(de)施載與進(jìn)給方案,第(dì)2節(jiē)將詳細設計分析此關鍵技術(shù)。
2.施載與微進(jìn)給係統設計
2.1 施載與微進給係統設計(jì)及分析
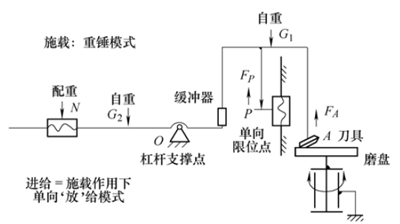
本文擬采用基於杠杆原理的重錘模式施載方案(圖4)。
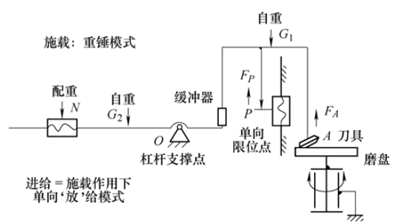
圖4 杠杆模式施載方案
施載方案數(shù)學表達式見式(1),其中FA和FP為磨盤對(duì)刀具研磨處A 點的支撐力(即刀具研磨施(shī)載)和單向限位處(chù)P 點的支撐力,其他參數(shù)為各(gè)個支撐點或(huò)自(zì)重及配重相應的力臂長度
文1
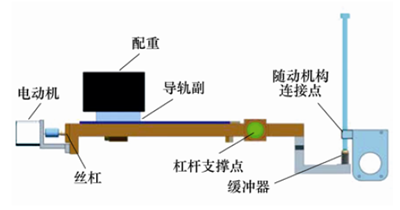
圓弧刃光柵刻畫刀具刃磨時基於(yú)杠杆原理的重錘模式施載方案具體實現方式是根據杠杆原理,杠杆一端設為固定載荷端,由刀架係(xì)統、微進給機構及部分杠杆重量之和,杠杆(gǎn)中心軸通過軸承安裝於床身,杠杆另一端設為可調載荷端,是(shì)由配重塊、配重塊位置調整機(jī)構組成的[16-19]。杠(gàng)杆固定載荷端的力臂的長度是(shì)固定的,刀具刃磨時的研磨壓(yā)力的(de)大小(xiǎo)是(shì)通過配重塊位置(zhì)調整來實現的。杠(gàng)杆中心軸到配重塊的距離為可調(diào)載荷(hé)端的力臂長度,調(diào)載荷端的力臂長度大,則刃磨(mó)壓力小;調載荷端的力臂長度小,則刃(rèn)磨壓力大。實現光柵刻畫刀具刃磨時的施載,是通過杠杆一端力矩的改(gǎi)變(biàn)而實現刀具刃磨壓力的調節。圓弧刃光柵刻畫刀具刃磨施載機構見圖5。
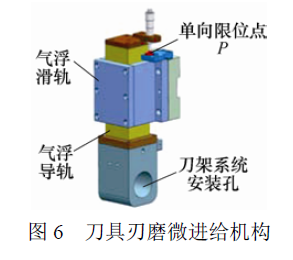
微進給方(fāng)案采用通(tōng)過杠杆原理實現的重力載荷下的.Z 單(dān)向(xiàng)微米級的“放”給模式,且+Z 方向刀具可實現與磨盤(pán)隨動。隨動機(jī)構(gòu)擬采用氣浮(fú)矩形(xíng)導軌(guǐ),實現Z 向導向及(jí)刀具隨動,且在X、Y 水平(píng)方向上實現約束。圓弧刃光柵刻畫(huà)刀具刃磨微(wēi)進給機(jī)構見圖6。
施載機構與微進給機構設計製作後,在A 和P處安(ān)裝(zhuāng)了重力傳感器,在靜態測(cè)試了進給量與各(gè)點受力分布情(qíng)況,見表1。進給執行機(jī)構為由(yóu)德國PI精密直線電動機與高精度矩形氣浮導軌構成的精密機構,可實現優於(yú)2 μm 的進給精度。采(cǎi)用精密直線電動機直(zhí)聯高精度矩形氣(qì)浮導軌結(jié)構(gòu),提高了進給剛度,減少(shǎo)了精度傳(chuán)遞(dì)環節,保證了刀具向磨盤的微米級的進給精度。另外,采用小摩擦因數的矩形氣浮導軌導向機構,提高了進給靈敏度及效率。
表 1 靜態測量進給(gěi)量(liàng)與支撐點(diǎn)受力情況
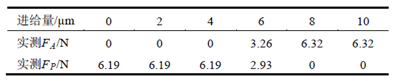
從表 1 能看出,靜止(即磨盤不轉動)狀態下進給量超(chāo)過2 μm 時,P 點的載荷直接轉移到A 點,顯然此時P 點的載荷變為零。但是由於實際磨盤麵具有一定的平(píng)麵度誤差範圍,刀具刃(rèn)磨過程中磨盤高速旋(xuán)轉使刀具刃磨表(biǎo)麵與磨盤間產生微米級(jí)的“動態接觸區域”。正因為這(zhè)個“動態接觸區域”的存在,使得在刀具刃磨過程中重力載荷下的Z 單向微米級的“放”給(gěi)模式成為可能。從表2 能看出,運動(即磨盤轉動)狀態下進給量超過8 μm 時,P 點的載荷(hé)完全轉移到A 點。由於在磨(mó)盤轉動情況下無法測量A 點的壓力,因此A 點(diǎn)的數據是通過式(2)計算出來的。因此完(wán)全可以通過P 點的重力傳感器測FP,間接的求FA,並與微進給係統相結合實現智能控(kòng)製模式。基(jī)於杠杆原理的施載及重力載荷下的Z 單向微米級(jí)的(de)“放(fàng)”給模式微進(jìn)給係統設計方案是本文的一項技術創新點。
表 2 動態測量進給量與支撐點受力情況對比表

2.2 機床的動態特性分析
機床的主要振源是(shì)磨盤係統高速(sù)旋轉產生的振動(dòng),磨(mó)盤(pán)係統(tǒng)額定(dìng)轉速為3 000 r/min,與其相(xiàng)應的頻率值為50 Hz,根據測試刀具刃磨時與較大(dà)振幅相對應的振動頻率值(zhí)分別為48 Hz、96 Hz。由(yóu)於刀具(jù)刃磨時(shí)金剛石、磨粒及高磷(lín)鑄鐵磨盤間的高速、激烈的摩擦運動,不可避免地引(yǐn)起刀(dāo)具振動,但(dàn)磨盤(pán)係(xì)統振源能否(fǒu)引起施載與微進給機構(gòu)的共振(zhèn),是圓弧刃光柵刻畫刀具刃磨機床設計的重點考慮的問[20-24]。本文設計的刃磨機床(chuáng)是由磨盤(pán)係統、刀架係統、坐標係統、施載與(yǔ)微進給係統四部分組成。由於磨盤係(xì)統采用現有的磨盤(pán)係統設計方法並(bìng)且磨盤係統的結構較為簡(jiǎn)單,已(yǐ)經實測得到了該係(xì)統的動態性能參(cān)數(固有頻率(lǜ)等(děng)),並在上文中給出。因此,在對機床的整機動態特(tè)性分析過程中,沒有將磨盤係(xì)統包含在內,主要對除磨盤(pán)以外的刃磨機床主要(yào)結構(gòu),即刀架係統、坐標(biāo)係(xì)統及施載與微進給係統進行了動態性能分(fèn)析。
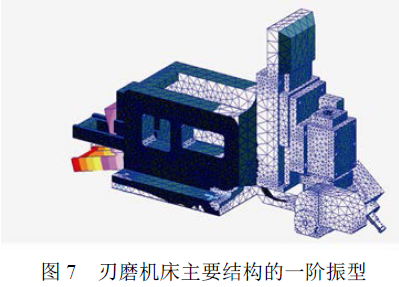
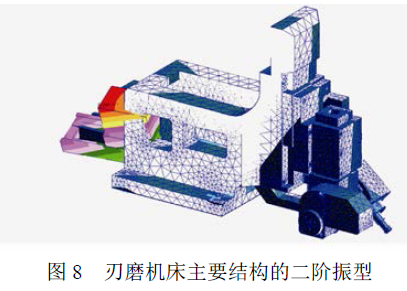
經(jīng)過對(duì)刃磨機床主要(yào)結構的具體結構參數進行優化設計,最終得出了能夠避(bì)開上述固有振動頻率的機床主要結構,其模態分析結(jié)果列於表3,其中頻率為107.69 Hz、259.57 Hz 的模態分析結果見圖7 和圖8。從上述(shù)模(mó)態分析結果可看,在磨盤50 Hz頻(pín)率振源的激勵下,刃磨機床主要結構(包括刀架係統、坐標係統及施載與微進給係統)中出現(xiàn)的振動(dòng)頻率最小值為(wéi)107.69 Hz,這(zhè)個值與(yǔ)振源激(jī)勵頻率50Hz 相差甚遠,所(suǒ)以排除刃磨機床產生共(gòng)振的可能性,說明此(cǐ)結構設計合理。
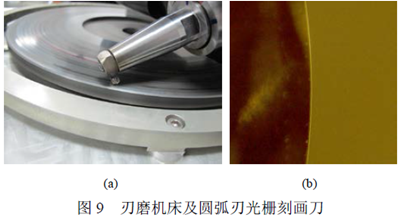
本文提出基於杠杆模式施載的圓弧刃光柵刻畫刀(dāo)具刃磨機床是為圓弧刃光柵刻畫刀具刃磨工藝特性而量身設計的刀具刃磨機(jī)床。此設計方案是否能夠滿足圓弧刃光柵(shān)刻畫刀具的(de)刃磨製作,隻能通(tōng)過相應的實際刀具刃磨試(shì)驗來加以說(shuō)明。鑒於此,本文選用了純度(dù)及透明度較高的八麵體金剛石(shí)作為刀頭材料,製作了圓(yuán)弧刃光柵刻畫刀具特殊的刀體,將天然金剛石按焊接麵與刀體焊合,並安裝於刀架機構上,進行研磨。考慮到圓錐麵研磨工藝特殊性,將金剛石八麵體的兩個110 脊線分別置於(yú)兩個圓錐麵上,且與刀刃中間點處切線(xiàn)垂直。圓錐麵研磨初期,將圓錐麵(miàn)分成若幹個平麵分別研磨,采用10 N研磨壓力及5 μm 的金剛石研磨膏;刃磨階段采(cǎi)用5N 研磨壓力及0.5 μm 的金剛石研磨膏,使用(yòng)往返運動(dòng)擺軸,偏擺研磨(mó),將若幹個平麵研磨成圓錐麵。最終采用基於杠杆(gǎn)模式施(shī)載的圓弧(hú)刃光柵刻畫刀具刃磨機床,刃磨製作了一把圓弧刃光柵刻畫刀具,在460 倍體視顯微鏡下觀察無崩口等缺陷,刃口弧線清晰可見。圖9a 為正在刃磨(mó)過程中的刃磨機床,圖9b 為刃磨製作的圓弧刃光柵刻畫刀具,其具體參數見(jiàn)表4。
表(biǎo) 3 刃磨機(jī)床主要結構振動分析結果
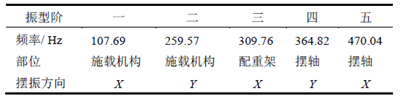
表 3 刃磨機床主要結構(gòu)振動分析(xī)結果
表 4 圓弧刃光柵刻畫(huà)刀具參數
3.試驗結果(guǒ)
圓弧刃半徑是采用體視顯微鏡測得,定向(xiàng)角及(jí)刀尖角是通過光柵刻畫刀(dāo)具測角儀測得,刃(rèn)口鋒利度及粗糙度均(jun1)采用原子力顯(xiǎn)微鏡測得。
4.結論
本文針對圓弧刃光柵刻畫刀具的(de)刃磨(mó),研製了一台圓弧刃光(guāng)柵刻畫刀具刃磨機床,采用了基於杠杆模式的施載與微進給技術,刃磨出定向角∠D=63°、刀尖角(jiǎo)∠J=90°和刃圓半徑R=8.56 mm 的圓弧刃光柵刻畫刀具,測試結果表明:刃口鋒利度為150 nm、刃口表麵粗糙度為5 nm、刀刃在460 倍體視(shì)顯微鏡下觀察無崩口等缺陷、弧線清晰可見(jiàn),刀刃質量能夠滿足光柵刻畫要求。基於杠杆模式施載與微進給技術不僅適用於圓弧刃(rèn)光柵刻(kè)畫刀具的刃磨製作,而且對其他金剛石(shí)刀(dāo)具(jù)刃磨機床的(de)設(shè)計具有(yǒu)指導意義。此外,由於圓弧刃(rèn)光柵刻畫刀具刃磨過(guò)程較(jiào)為複雜,且刃磨運動由多軸聯動運動組成,其耦合軌跡對刀具刃磨精度的影響規律有待深入研究。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或(huò)進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或(huò)進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信(xìn)息

業(yè)界視點
| 更多

行業數據(jù)
| 更多
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分(fèn)地區金屬切削機床產量數據
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月(yuè) 新(xīn)能源(yuán)汽車(chē)產量數據(jù)
- 2024年(nián)11月 新能源(yuán)汽車銷量情況
- 2024年10月 新能源汽車(chē)產量數據
- 2024年(nián)10月 軸承出口(kǒu)情況
- 2024年10月 分地(dì)區金屬切削機床產量數據
- 2024年(nián)10月 金屬切削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年(nián)8月 新能源汽(qì)車產(chǎn)量(liàng)數據
- 2028年8月 基本(běn)型(xíng)乘用車(轎(jiào)車)產量數據