機")



摘 要:當前(qián)隨(suí)著科學技術的不斷發展,數控機床的精度也較(jiào)之前有了更加嚴格的要求,數控機床在(zài)長時間的使用中精度值會降低,螺距使用(yòng)中會加大誤差,影響設備(bèi)的(de)加工精度,因此定期對螺距進行誤差補償(cháng)很重要。在實際工作中主(zhǔ)要采(cǎi)取雙頻激光幹涉儀法對係統進行有(yǒu)限(xiàn)補償,經實踐檢驗已取得了顯著的(de)成效。
關鍵詞:加工中心(xīn);精度;數控係統;螺距誤差補償
1 、加工中心機床數控係統螺距誤差補償原理
通(tōng)過對數控機床某軸的指令(lìng)位置(zhì)與高精度測量(liàng)係(xì)統測得的實際位置進行比較(jiào),並經過相關(guān)公式計算可得全行程上的誤差曲線,技術人員將所獲取的誤差值繪製成相應(yīng)的表格並輸入到數控係統中。數控係統在工作中會對該軸進行實(shí)時控製,若發現存在異常情況會(huì)在第一時間進行自動修複(fù)將誤差控製在允(yǔn)許範(fàn)圍內。誤差補償(cháng)應遵循一定的(de)原則(zé):(1)必須在機床(chuáng)上安裝(zhuāng)精度較高(gāo)的測量(liàng)裝置;(2)根據需要編寫相應(yīng)的程序(xù),在具體的位置設(shè)置(zhì)一些標誌點;(3) 係統運行到標(biāo)記位置應選擇測量裝置進行有效測量(liàng)並記錄精確位置(zhì);(4) 記(jì)錄各(gè)位置點的(de)誤差值;(5)為了使測量更加精確,可多次測量求平均值;(6)將修正表輸入數控係統中,進行針對(duì)性的誤差補償。
2 、螺距誤差(chà)與補償的幾(jǐ)種常見類型
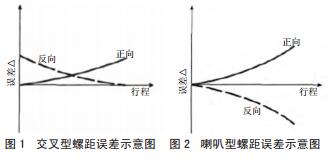
2.1 交叉型螺距誤差與補償
設備正常工作(zuò)中由於絲杠之間配合不緊密或者其他因素的製(zhì)約影響機床的精(jīng)確性,為了有效解決上述問題在(zài)機床重複工作中可對絲杠的機械安裝結構進行不同程度的處理後,再進行(háng)重新測量,根據所獲知的(de)參數對機床進行誤差補償。機床交叉型螺距誤差示意圖見圖(tú) 1 所示。
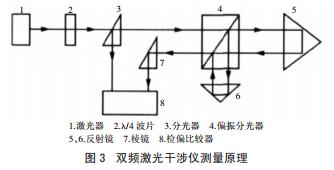
2.2 喇叭型螺距誤差與補償
機床的被測軸在全行(háng)程的(de)各段(duàn)誤差分布不(bú)均勻,尤其是機床反向(xiàng)運行時誤差較大,從而(ér)造(zào)成反(fǎn)向間隙超過係(xì)統可允許(xǔ)範圍。造成上述現象的原因是該軸導軌副出現鬆緊不一情況所引發的,再加之在誤差測量中由於定位(wèi)精度不準確,隨(suí)著該軸的不斷變(biàn)動,誤差會變得更大,形成了喇叭型的正(zhèng)反向定位曲線。出現(xiàn)上述情況可(kě)對設備進(jìn)行適當的改(gǎi)進,並采取螺距反向間隙補償模式(shì)進(jìn)行校正(zhèng),確保設備正(zhèng)常運行。圖 2 所示。
3 、基(jī)於雙頻激(jī)光幹涉儀的(de)動態補償
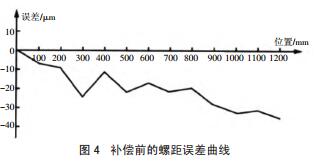
3.1 雙頻激光幹涉儀工作原理
雙頻(pín)激發幹涉儀測量原理見圖 3 所示,該測量原理是通過賽曼效應的有效應用,使激(jī)光器 1 所產生的光束經 λ/4 波片 2 和分光器 3 後轉變成振(zhèn)動方向(xiàng)垂直的 f1 偏振光以及頻率穩定的 f2 偏振光。經由分光器 3 反射的光束會通過一定的作用送(sòng)入檢偏比(bǐ)較器 8 從(cóng)而產生一(yī)定的(de)信(xìn)號。通過分光器 3 的光束在經過偏振分光器 4 後會兵分兩路,與分光(guāng)鏡片 f2信號平行的分光器最(zuì)終會裝在移動部件上的反射鏡5 處,當機床處(chù)於正常工(gōng)作(zuò)狀態時會產生一定的(de)差頻即 Δf,f2 信號也(yě)隨即變成 f2+Δf;而(ér)與分光鏡片(piàn)垂直的 f1 信號則通過一定條件的反射會固定到反射鏡 6上,通過兩次反(fǎn)射(shè)後最終(zhōng)匯合於偏振(zhèn)分光器(qì) 4 的位置,這時經過一(yī)係列傳輸的信號中已包含了機床移動中所具有的相關信息即 Δf;通過反射鏡 7 送入檢(jiǎn)偏比較器 8 中,最終所得出的脈衝差(chà)值即(jí)就是機床在運行中實際移動距離。圖(tú) 3 所(suǒ)示。
3.2 螺(luó)距誤差動(dòng)態補償的(de)實現
螺距誤差動態補償係統的工(gōng)作原理表示如下:
(1)通過串(chuàn)口 RS232 將計算機與 SINUMERIK802S/C係統 的 CNC 控製(zhì)器相聯接,並借助計算機控(kòng)製雙頻激光幹涉(shè)儀實現數控機床的同(tóng)步工作;(2)計算機可通過數據采集卡對所(suǒ)獲(huò)取的(de)數據進行準確(què)測(cè)量,並(bìng)與(yǔ) CNC 譯碼器輸出的指(zhǐ)令(lìng)值進行比較,所得出的差值最終經由計算機進行處理;(3)補(bǔ)償接口會將軟(ruǎn)件所(suǒ)計算出的(de)補償數值輸入數控係統(tǒng)中,從而確保係統得以正常工作。
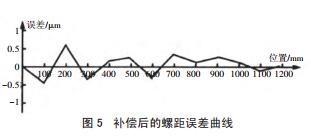
3.3 螺距誤(wù)差補償實(shí)例
對一台 SINUMERIK 802S/C 係統數控機床的 X軸螺距誤(wù)差進行(háng)補償,圖 4 代表的(de)是補償前螺距(jù)誤差曲線(xiàn),圖(tú) 5 表示補償後的螺距誤差曲線,通過對兩圖的比較分析螺距誤差通(tōng)過動態補償後機床的位置控製精確度得到了明顯的增強(qiáng),加工性能也較之前得到了改進,從中(zhōng)也說明了采取螺距誤差(chà)補償方式是合理的。
4 、結束語
綜上所述,數控係統的螺距誤差補償方式在提高機床定位的精確性方麵起(qǐ)到了一定的作用,但造成機床加工誤差較(jiào)大的重要影響因素仍(réng)是裝配工藝的不科學或機械設計存在異(yì)常所致,所以若遇到螺(luó)距誤差偏大時需對設備進行檢修,將誤差盡可能降低的前提(tí)下再實施螺距誤差補償效果將更為顯著。
如果(guǒ)您有機(jī)床行業、企業相關(guān)新聞稿件發表(biǎo),或進行資訊合作,歡迎聯係(xì)本網編輯部, 郵箱(xiāng):skjcsc@vip.sina.com
馬")

- 2024年11月 金屬切削機床產量數據
- 2024年11月(yuè) 分地(dì)區金屬切削機床產量數據
- 2024年11月 軸承出(chū)口情況
- 2024年11月 基本型乘用車(轎車(chē))產量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源汽車銷(xiāo)量(liàng)情況(kuàng)
- 2024年10月 新能源汽車產量數據
- 2024年10月 軸承出口情況
- 2024年10月 分地區(qū)金屬切削機床(chuáng)產量數據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新(xīn)能源汽車產(chǎn)量數據(jù)
- 2028年8月 基本型乘用車(轎車)產量數據