



一、引言
在帶旋轉(zhuǎn)工作台的(de)四(sì)軸(zhóu)加工中心上,已知工件上任意(yì)一(yī)點的坐標及該點法(fǎ)向與機床Z 軸的夾角,利用宏程序可以很(hěn)快地求出工件旋(xuán)轉任意角度某點的新坐標,使刀具能快速準確地定位(wèi)於工作台旋(xuán)轉後的新點位,從而實現任意點位的坐(zuò)標跟蹤功能,在該(gāi)點的法向平麵內編程,很容易實現坐標係的旋轉。在進行複雜工件的多麵加工時,可以極大地減輕工人的找正強度,同時又大大簡化編程,效率得(dé)到大幅提升,具有較強的實際(jì)意義。
二、四軸加工中心及裝夾特點
四軸加工中心,除X、Y、Z 三(sān)軸外,一般有一旋轉工作台,立式加工中心為繞X 或Y 旋轉的A 或B 軸。臥式加工中心為繞(rào)Y 軸旋轉的B 軸。無論是立(lì)加還是臥加,在加(jiā)工時,工(gōng)件裝在旋(xuán)轉(zhuǎn)工作台上,操(cāo)作者都需要先找正工件,然後將找正數值輸入到數控係統的坐(zuò)標偏置寄存器中,這樣就確(què)定了一個工件坐標係。然而(ér),不同的零件其形狀、加工部位和裝夾姿態不同,所對應的找正基準也就不同,所設(shè)定的坐標係也是不同的,即工件(jiàn)坐標係是隨不同的零件而隨機設定的(de)。但是有一部(bù)份工(gōng)件,其加工部位與找正基準所確定的坐標係對應著一定的(de)角度關係,該角度可能是一個(gè)變量,且(qiě)在圖紙上所標的基準往往是找正基準。操作者在(zài)加工此類工件時如果沒有夾具定位,不同(tóng)的工(gōng)件需要找正坐標係,每次裝夾都要(yào)進行(háng)細心繁瑣的計算,以求出所加工點位坐標(biāo)與工作台旋(xuán)轉中心的偏移量,或者通過先旋轉(zhuǎn)工件,再找正加工點位麵的方法。這樣不僅效率低下,易出錯,而且大量占用了機床的調試時間,增加(jiā)了操作者的工作強度。
如何能讓操作者按圖紙找正工件的基準,不用考慮工件旋轉的點位變換,就可以在找正的基準下的坐標係內直接編(biān)程(chéng),快速地進(jìn)行加工呢?利用宏程(chéng)序來(lái)進行坐標變換,計算出工作台旋轉任一角度後的點位的(de)新坐標,從而使刀具(jù)快速定位於工件上的這一坐標(biāo)點,可以輕而易舉地實現這一點。
三、相關坐標係及點位轉換(huàn)
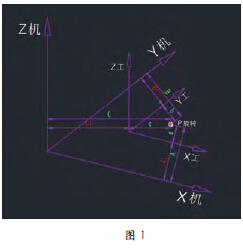
如圖1 所示加工工件時加工中心的相關坐(zuò)標係。機床坐標係是機床廠家設置在(zài)機床上的一個物理原點,一經回參(cān)考點,機床坐標係就建立起來了,它的原點即為機(jī)床的絕對原點。工件坐標係是(shì)以工件上的某(mǒu)一點為原點的坐標係,操作者找正工件後將相關數據輸入到數控機床坐標偏置內的值即為工件(jiàn)坐標係的原(yuán)點,它在機床坐標係中的坐標位置如圖所示(shì)為(wéi)A1、B1、C1 值。四軸旋轉工作台的旋轉(zhuǎn)中心(P 旋轉)是在機床中的一個固定點,它(tā)在機床坐標中的位置也是固定的,其(P 旋轉)在機床坐(zuò)標(biāo)係中的坐(zuò)標位(wèi)置為(wéi)A、B、C 值。故可以(yǐ)求得工件坐標(biāo)係與四軸(zhóu)旋轉中心(P 旋轉)的相(xiàng)對關係為:
a=A-A1
b=B-B1
c=C-C1
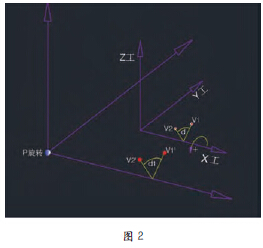
如圖2 所示,工件上任一(yī)點V1 點繞旋轉工作台旋轉中心(P 旋轉)旋轉任一(yī)角至V2 點,V2 點的新坐標可以分以下三步完成:①將V1 點平移至V1’點,用圖形變換原理可以理解為將工件坐標係的原點平(píng)移(yí)至四軸旋轉中心。② V1’點繞X 軸作d1 角度的旋轉,可(kě)以理(lǐ)解為V1’繞四(sì)軸旋轉中心(P 旋轉)作旋轉。③將V2’點移回V2 點,可以理解為將工件坐標原點從四軸旋轉中心移回。這樣隻要通過數(shù)控(kòng)係統的宏程序功能,運用正餘弦運算就(jiù)比較容易編製出四軸加工中心旋轉工作台任意一點跟隨坐標係的宏程序。
四、轉換坐標點的宏程序
為了操作簡便,操作者可以利用(yòng)數控機床的(de)坐標寄存器將事先找正的四軸旋轉工作台的(P 旋(xuán)轉)坐標值輸(shū)入到G59 坐標係,將(jiāng)裝夾好(hǎo)的(de)工件(jiàn)基準麵找正設(shè)置旋轉角(jiǎo)度(dù)基準A0 值並輸(shū)入到G54 坐標係的A 坐標中,將要加工的點位坐標輸入到G58 坐標係中。運用G58 坐(zuò)標係中的坐標值減去G59 坐標(biāo)係中的坐標值,即得(dé)到如圖1 中所示的A、B、C 值,可以(yǐ)理解為已(yǐ)將工件坐標係原點平移至(zhì)四軸旋轉中心;這時可以旋轉工(gōng)作台至如圖2 所示的d1 角度;再通過三角函數(shù)計算出旋轉角度後的直線位移,並疊加到原(yuán)G59坐標係中,如圖2 所示(shì)可以理解為將工件標係原點(diǎn)從四軸旋轉中心移(yí)回新位移的V2 點。最後(hòu)調用係統參(cān)數將經過宏程序計算(suàn)過的G59 疊(dié)加後坐標值重新賦值給G54 坐標中。將該宏程序命名為O9011,同時將係統NO.6051 號參數寫入123,再以後(hòu)的加工中(zhōng)則可以直接編寫G123 調用O9011宏程序,從而實現任意點位的坐標跟蹤。
%
O9011
#999=#1( 將旋轉角度值A 賦(fù)值給宏參數#999)
#952=#5302-#5322( 將G58 坐標係Y 值減去G59坐標係Y 值)
#953=#5303-#5323( 將G58 坐標係Z 值減去G59坐標係Z 值)
#955=SQRT[[#951*#951]+[#952*#952]]( 求出工件(jiàn)坐標原點與旋轉中心的距離值R)
#956=ASIN[#952/#955]( 求出工件坐標原點(diǎn)在以旋轉中心為原點的坐標係中(zhōng)的夾角α)
IF[#952GE0]GOTO9002( 判斷角度旋轉方向是否與規定旋轉軸正方向一致)
N9001#956=180.-#956( 如果不一致取(qǔ)其補角)
2#961=#955*COS[#956-#999]( 將工件坐標係原點
在以旋轉中心為原點的坐標係中向Y 方向的投影矢量賦(fù)值給宏參數#961)
#962=#955*SIN[#956-#999]( 將工件坐標(biāo)係原點在
以(yǐ)旋轉中心為原點的坐標係中向Z 方向(xiàng)的投影矢量賦值給宏參數#962)
G 1 0 G 9 0 L 2 P 1 X [ # 5 3 2 1 ] Y [ # 9 6 1 + # 5 3 2 2 ]
Z[#962+#5323](求出旋轉中心的(de)坐標係G59 的Y 和Z 方
向值與工件坐標原點在以旋轉中心(xīn)為坐標原點的坐標係中各方向投影矢(shǐ)量和,並將(jiāng)之賦值給G54 坐標係)
M99
%
五、實際加工(gōng)應(yīng)用
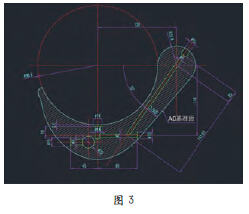
如圖3 所示零件,在四軸加工中(zhōng)心上需要完成打沉孔,鑽深孔等工序,利用各孔位與A0 基(jī)準麵的角度關(guān)係和尺寸關係,通過點位坐標係跟蹤的宏程序,隻要一次找正A 麵,
即可準確地定位其它各(gè)點的坐標與刀具的相對位置,在實際生產中獲得了較高的尺寸精(jīng)度和生產效率。其加(jiā)工程式在四坐(zuò)標加工中心2033VMC 上經過加工驗證,程序如下。
%
O0011
G91 G28 Z0;
G0 G90 G54;
G123 A220.568;
G0 G90 G54 X0 Y-116. A220.568 ;
M98 P0001;
G91G28Z0;
M01;
G0 G90 G54;
G123 A40.568;
G0 G90 G54 X0 Y-126.88. A40.568 ;
M98 P0002;
G91G28Z0;
M01;
G0 G90 G54;
G123 A310.568;
G0 G90 G54 X0 Y130. A310.568 ;
M98 P0003;
G91G28Z0;
M01;
G0 G90 G54;
G123 A275.568;
G0 G90 G54 X0 Y0 A275.568 ;
M98 P0004;
G91G28Z0;
G28Y0;
M30;
%
%
O0001
T1 M6;( 雙刃銑刀 D=10)
G0 G90 G43 H1 Z130. S1000 M3;
M8;
G83 Z-65. Q1. R-60. F150;
G80;
T2 M6;( 合金(jīn)鑽 D=5)
G0 G90 G43 H2 Z130. S1500 M3;
M8;
G83 Z-130. Q3. R-70. F150;
G80;
M99;
%
%
O0002
T3 M6;( 雙刃銑刀(dāo) D=15)
G0 G90 G43 H3 Z230. S600 M3;
M8;
G83 Z175. Q1. R185. F90;
G80;
T4 M6;( 合金鑽 D=9)
G0 G90 G43 H4 Z230. S1000 M3;
M8;
G83 Z145. Q2. R180. F100;
G80;
M99;
%
%
O0003
T5 M6;( 雙刃銑刀 D=14)
G0 G90 G43 H5 Z60. S800 M3;
M8;
G83 Z-101. Q1. R-95. F80;
G80;
T6 M6;( 合金鑽 D=8.6)
G0 G90 G43 H6 Z230. S1000 M3;
M8;
G83 Z-120. Q2. R-99. F100;
G80;
M99;
%
%
O0004
T7M6;( 雙刃銑刀 D=10)
G0 G90 G43 H7 Z100. S1200 M3;
M8;
G83 Z20. Q1. R70. F120;
G80;
T8 M6;( 合金鑽 D=5)
G0 G90 G43 H8 Z100. S1500 M3;
M8;
G83 Z-141.61. Q1. R60. F100;
G80;
M99;
%
六、結(jié)語
在實際生產中(zhōng),通過宏程序實現(xiàn)在數控機床(chuáng)旋(xuán)轉工作台上任意(yì)點位的坐標跟蹤具有較強的實際意(yì)義,體現(xiàn)出以下優(yōu)勢。
(1)簡(jiǎn)化計算,簡化編(biān)程。
避免了在計算機輔助設計軟件中旋轉CAD 模型,以求得各點位(wèi)的坐標,也省去了使用計(jì)算機輔助製造軟(ruǎn)件編製CAM 刀具路徑,隻需要手工編程的方式就可達到目的,節省了投入和時間,大幅(fú)提高編程效率。
(2)提(tí)高(gāo)找正(zhèng)效率(lǜ),降低工人(rén)勞動強度。
一次裝夾隻需一次找正一(yī)個基準麵,再根據圖紙尺寸關係和角度關(guān)係,即可準確(què)定位刀具在其它點位的坐標(biāo),避免了因不同加工麵而采用不同的找正基準的方式來加工,極大地減輕人(rén)工勞動強度,同(tóng)時大大減少了停機設定調試的時間。
(3)擴展數(shù)控係統功能,提升四軸機床的(de)應用水平。使用宏程序變換坐標旋轉(zhuǎn),並通(tōng)過修改係統參數,設定為用戶可以使用的G 代碼,在編製程序時簡單快捷,在查閱程序時一目了然,豐富了用戶功能代(dài)碼,擴展了係統(tǒng)功(gōng)能。
通過利用宏程序較強的數學與邏輯運算能力,針對某一類相似零件編(biān)製出具(jù)有(yǒu)“柔性”的加工程序,準、快(kuài)、好地完成加工生產(chǎn),進而提升數(shù)控機床的應用水平(píng),希望本文在此起(qǐ)到(dào)一個拋磚引玉的作用。
如果您有機床行業(yè)、企業(yè)相(xiàng)關新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com


- 2024年11月(yuè) 金屬切削機床(chuáng)產量數據
- 2024年11月 分地(dì)區金屬切削(xuē)機床產量(liàng)數據(jù)
- 2024年11月 軸承出口情況(kuàng)
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月(yuè) 新能源汽車產量數據
- 2024年10月 軸承(chéng)出口情況
- 2024年10月 分地區金屬切削機床產量數據
- 2024年10月 金(jīn)屬(shǔ)切削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽(qì)車產量數據
- 2028年(nián)8月 基本(běn)型乘用車(轎車)產量數據