



摘要(yào):介紹了法國COMAU URANE 25 V3型加工中心的結構特點,通過研究840D數(shù)控係(xì)統中軸同步的原理及作用,分析了設備自帶同步程序,詳細介紹整個軸同步過程。
1. 機床(chuáng)簡介
法(fǎ)國COMAU URANE 25 V3型加工中心(見圖1),控製係統是西門子840D數(shù)控係統(tǒng)、采用(yòng)Kessler的30 kW高(gāo)速電主軸,X/Y/Z三個直(zhí)線軸使用西門子直線電動機驅動,配備雙刀庫(kù)自動換刀,實現了機床高速加工。
2. 機床結構特點
進給軸控製刀具運動,使用雙直線電動(dòng)機的龍(lóng)門式框架結構,提高機床剛性,充分利用機床加工空間;回轉軸(A軸或B軸)用於(yú)工(gōng)件的回(huí)轉和(hé)擺(bǎi)動;C軸是高速電主軸,轉速為18 000~24 000 r/min。機床軸結構如圖2所示。與傳統滾珠絲杠傳動方式比較,采用(yòng)直線電動機的傳動(dòng)方式(shì)具有以下明(míng)顯優勢:
(1)減少中間傳動環節,提高伺(sì)服(fú)係統動態(tài)響(xiǎng)應性能。
(2)消除了機(jī)械(xiè)產生的傳動間隙和誤(wù)差,定位更準確。
(3) 減少了(le)機械部件的摩擦,運動噪聲小。
(4)能量消耗(hào)少,傳動效率高。
直接驅動的直線軸與(yǔ)直接驅動的回轉軸相組合,使機床所有的(de)運動軸具有較高的動態性能和調節特性,從(cóng)而為高速度、高精度和(hé)高表麵質量加工提供了最佳條件。
3. 軸同步的原理
(1)軸同步的(de)起因:在機床實際加工中,X1/X2,Y1/Y2,Z1/Z2是各自作為一個軸參與編程動作。URANE 25型加(jiā)工中心的840D數控係統中,Y1/Y2 是使用的同一伺服驅動及光柵(shān)尺,消除了控製與反饋的誤差(chà),因(yīn)此不需要考慮Y1/Y2的運行差異。Z1/Z2軸的(de)控製方式與Y1/Y2相同,而(ér)X1/X2的控製方式是各自(zì)獨立控製(zhì)的,因此,不可避免的會出(chū)現偏差。圖3是一個刀架結構布(bù)置的示意圖(主軸C的軸向位(wèi)置),當數控(kòng)係統(tǒng)發出指令讓(ràng)主軸沿著X軸的方(fāng)向移動到某一位(wèi)置時,刀架理(lǐ)論的(de)垂直方向中心線與(yǔ)實際的中心線並(bìng)不一致 ,刀架出(chū)現了所謂(wèi)的扭曲現象。這時實際的中心線 X2-X1≠0 ,造(zào)成這種現象的原因主要有:①龍門框架式的機床結(jié)構,由於重力的作用,造成機械結構的變形。②X1軸和X2軸導軌(guǐ)與(yǔ)
刀(dāo)架的摩(mó)擦阻力不一樣,在機床高速移動時出現偏差。③X1軸和X2軸分別有各自的電動機和伺服驅動及光柵尺反饋裝(zhuāng)置,存(cún)在出現偏差的可能。

圖 1
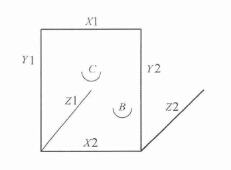
圖 2
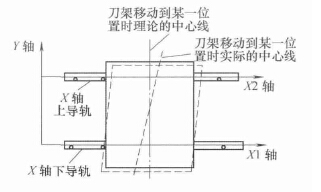
圖 3
為了(le)提高機床刀架的定(dìng)位準確,並(bìng)消除刀架的扭曲現象,可(kě)以通過在X1/X2間作一個補償,以保障X2-X1盡可能的等於零,以保障中心線的理論與實際位置盡可能的吻(wěn)合,我們把這(zhè)個補償的過程叫(jiào)做“軸同(tóng)步”。
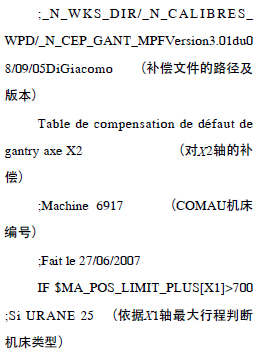
(2)同(tóng)步(bù)功能的實現:840D數(shù)控係統中可以選擇懸垂補償功能(sag compensation),係統中將X1軸定義(yì)為基準軸,X2軸是補償軸,因此(cǐ)實際上是相對於X1軸而對X2軸
的補償(偏差可正可負)。通過軸參數(shù)的配置、補償文件的執行,實現(xiàn)了補償功能。COMAU URANE係列機床在840D數控係統(tǒng)的基礎上,開發了一(yī)個名為CEP_GANT的程序,使整個軸同步的過程更加簡單便捷。
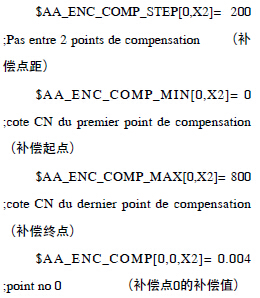
選擇幾(jǐ)個坐標點(例如5個或6個,由參數(shù)MD18342定(dìng)義)的位置坐標實(shí)際值和電流(liú)值,根據這些坐標值和電(diàn)流值的大小,數控係統可以判斷出這些坐標位置的(de)誤差值和
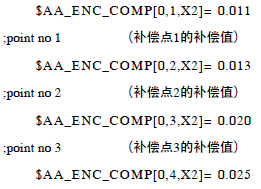
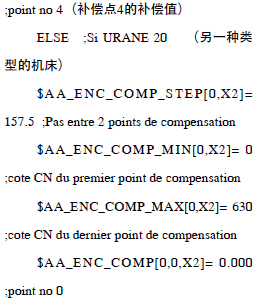
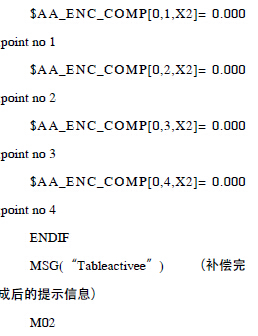
導軌阻力的(de)大小,然後(hòu)對相應的坐標軸進行位置補償(cháng)。以下(xià)程序是COMAU URANE係列機床的軸同步程序(xù)及解讀(紅色文字):
4. 軸同步的應用
(1)什麽情況需要軸同步?機床在初始安裝調試階段或更換X1、X2軸的導軌、電(diàn)動機、光柵尺後是必需要做軸(zhóu)同步的。我們考慮(lǜ)的主要是在設備正常使用中,如(rú):X1或X2軸在機床正常循環時,出現伺服回路的報警:“軸跟隨誤差”、“輪廓監控”、“驅動(dòng)故障”等,往往會同時出現一些機床安全監控的報(bào)警(jǐng)。如果這(zhè)些報警可以直接“複位”,或者在機床(chuáng)斷電後消失,機(jī)床又(yòu)可以正常循環;並且(qiě)機床的機械部分正常,導(dǎo)軌的(de)潤滑是正常的,刀架移動是正常的等,即所有與X1和X2軸有關的機械部件(jiàn)狀態(tài)都是(shì)正常的(de),這個時候就可以考慮是否X1、X2的同步不好。兩種方法判(pàn)斷:①自動循環時(shí),觀察X1、X2的電(diàn)流(liú)值,正常情況下(xià),直線電動機的負(fù)載電流應<5%。②手動(dòng)將(jiāng)X軸移動到兩端(URANE 25型機床坐標是20、780),按(àn)下“急停”後,查看X1、X2軸坐標,差值最大應在20~30 μm(兩端總是相反方向)。如果出現上述之一,就需要對X1、X2重新進行同步。
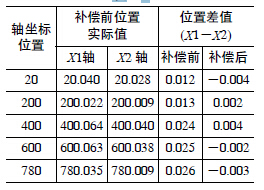
(2)軸同步的步(bù)驟:①因(yīn)是對X1、X2重新同步,首先需要取消X1和X2的s a g補償,修改參數PM32710 [0] = 0。② X1、X2補償取消:PM32700[0]=0。③按Reset健“//”或者選擇“激活參數”。④記(jì)錄同步前後電動機電流測量(見表(biǎo)1)。根據電流數據表(biǎo)設定的5個坐標點,移動X軸至(zhì)行程中各(gè)不同點,並記錄X1和(hé)X2軸各點的電流值(進入該(gāi)頁麵:診斷/維修/驅動維修,實(shí)際電流的(de)平均值)。⑤X1和X2同步前後測量(liàng)值差值(見(jiàn)表(biǎo)2)。根據位置數據表設定的5個坐標點,移(yí)動(dòng)X軸至行程(chéng)中各不同點。在每個位置,按“急(jí)停”鍵,
切斷軸(zhóu)電源,記錄X1和X2軸的位置。⑥計算X1-X2的差(chà)值並且將其輸入程序CEP_GANT.mpf(在文件Piéces / Calibres下麵),選擇並執行程序CEP_GANT.mpf(在在文件Pièces/Calibres下麵),係統提示窗口顯(xiǎn)示“Table active”,表示同步已執行完(wán)成。⑦重複(fù)④、⑤步,檢查補償後的(de)效果,如表1、表2所示。⑧激活X2的s a g補償:PM32700[0]= 1。⑨激活X1和X2軸的補償:PM32710[0]=1。
表 1
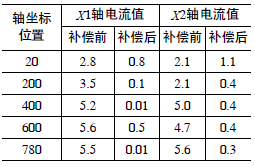
表 2
5. 結語
對COMAU URANE 25 V3型加工中心軸同步應用過程的解析,我們深入了解了840D係統的軸同步功能實現過程。並通過解讀COMAU的同步程序及整個同步的過程,掌握軸同(tóng)步的應用時機,對於處理COMAU同類型機床的(de)故障提供了(le)借鑒。當然,COMAU此(cǐ)類機床還有很多特有的功能,有待我們更進一步地探索研究。
如果您有(yǒu)機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯(jí)部(bù), 郵箱:skjcsc@vip.sina.com
州金馬")

- 2024年11月 金屬切(qiē)削(xuē)機床產量數據
- 2024年11月 分地區金屬(shǔ)切削機床產量數據
- 2024年11月(yuè) 軸承出口情況
- 2024年11月(yuè) 基本(běn)型乘用車(轎車)產量數據(jù)
- 2024年11月 新(xīn)能源汽車產量數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產量(liàng)數據
- 2024年10月 軸承出(chū)口情況
- 2024年10月 分地區金屬切削機床產量數據
- 2024年10月 金屬切削機床產量數據(jù)
- 2024年9月 新能(néng)源汽車銷量情況
- 2024年8月 新能源(yuán)汽車(chē)產量數據
- 2028年8月 基本(běn)型乘用車(chē)(轎車(chē))產量數(shù)據