


淺(qiǎn)析數控車床的反(fǎn)向(xiàng)間隙及其補償(cháng)
2020-5-25 來源: 安徽機電職業技術學院 作者:吳亞蘭,李 慶(qìng)
摘要:分析(xī)了反向間隙產生原因及其影(yǐng)響因素,提出了(le)多(duō)種反向間隙的測量和補(bǔ)償方法(fǎ),並(bìng)對各種方(fāng)法進行了比較,得出了其(qí)使用場(chǎng)合。使得反向(xiàng)間隙補(bǔ)償能大幅減(jiǎn)小(xiǎo)開環和半(bàn)閉環控製(zhì)機床的加工誤差(chà),提高合格率。
關鍵詞(cí):方向間隙 測量方法 補償方法
1、引言
反向間隙誤差是指機床在改(gǎi)變(biàn)運動方向後機床工作台的運動短暫滯後於電機旋轉(zhuǎn),導致工作台或刀(dāo)架的實際運動量與理想值不同步而產生的反向偏差。在半閉環控(kòng)製數控機床中(zhōng),反向間隙將會影響機床(chuáng)移動過程中的定位和重複定位精度(dù),從而影響被加工零件的精度。如(rú)果反(fǎn)向(xiàng)間隙過(guò)大(dà),加工出的零(líng)件會產生較大圓度和直線度誤差,而增加(jiā)廢品率。
2、產生(shēng)原因
由電機(jī)驅動經過滾珠絲杠驅動工作台的進(jìn)給係統時,由(yóu)於裝配過程中機(jī)械間隙、長期運動傳動鏈的磨損以及(jí)伺服電機和(hé)伺服馬(mǎ)達反(fǎn)向(xiàng)死區(qū)的存在,使得(dé)當機床從一個方向運動換向為另一個方向時(shí),執行部件的動作與數(shù)控係統(tǒng)的指令不同步,影響機床運動軸的定位和重複定位(wèi)精(jīng)度。最終反映為被加工(gōng)零件的尺寸和形位誤差。反(fǎn)向間隙是(shì)進給係統滾珠絲杠(gàng)等部件裝(zhuāng)配(pèi)後客(kè)觀存在的,屬於不可避免的加工原理誤差,但是可以通過條(tiáo)件控製與誤差補償減小其對加工得影響。
3、影響反向間隙誤差的因素(sù)
由於在實際運動過程中滾珠絲杠副的受力是時刻變化的,因此其影響因素很(hěn)多。在影(yǐng)響滾珠絲杠反向間隙的(de)眾多(duō)因素中,熱變形和應力形變對反向間隙的影響最大。熱變形是指滾珠絲杠的(de)主要組成部件如絲杠、螺母等(děng)在(zài)運動過程中產生的熱源,其熱源會傳遞給機床其他零部件,使得相(xiàng)應零部件產生變形。它將直接影響零件的加(jiā)工精度。絲杠的應力形變是指滾珠絲杠副在運動過程中產生的應力集中,它會(huì)使滾珠絲(sī)杠在運動過程(chéng)中產生位(wèi)移,從而降低機床(chuáng)的(de)定位精度和重複定位(wèi)精度,容易(yì)導致被加工零件的形位誤差過大。
4、檢測(cè)方法
反向間隙誤差的測(cè)量方法主要(yào)有兩大類,一(yī)類是用儀(yí)表法測量,另一類是通過試切法測量。其中儀表法測量主要用的儀表包括百分表、千分表、激光(guāng)幹涉儀等。其中激光(guāng)幹涉儀和球杆儀(yí)屬於(yú)高精度(dù)儀器(qì),測量數據精準度高,但價(jià)格昂貴;百分表雖然價格便宜,但其本(běn)身靈敏度低,導致檢測出的數據準確性差;千分表(biǎo)是較理想的選擇,檢測精度較準確,價格也合適,是儀表(biǎo)法檢測反向間隙常用的(de)工(gōng)具(jù)。
FANUC 0i-Mate係統提供參數設置,可補償切削和快速進給兩種模(mó)式下(xià)的反向間隙。一般選(xuǎn)擇(zé)在切削進給方式下(xià)進行測量,以更準確反應(yīng)加工的實(shí)際情況。
4.1儀表法測量反向間隙以在切削模式下用千(qiān)分表測量X軸反向(xiàng)間隙為例,具體步驟如下。
(1)將機床(chuáng)回參考點。
(2)運(yùn) 行 程 序,將 機 床 移 動 到 一 個 定 點,如 G01X100F100。
(3)此時(shí)在機床上裝上千分表(biǎo)測量 X 軸,壓(yā)表後轉(zhuǎn)動表盤將表針調為(wéi)0。
(4)運 行 程 序,將 機 床 往 前 繼(jì) 續 移 動,如 G01X200F100。
(5)運 行(háng) 程 序,將 機 床 移 回 到 原 來 的 測 量 點,G01X100F50,此時表針會與(yǔ)機床(chuáng)接觸,進(jìn)給速度應慢些。
(6)此時觀察千分表讀數(shù),其顯示數(shù)值即為 X 軸在100mm 內的反向間隙。Z方向的反向間(jiān)隙測量方法和 X 向類似。注意在(zài)首次(cì)進行反向間(jiān)隙補償時,要將數控係統中其對應的補償參(cān)數值清零(FANUC係統中為1851號參數)。
4.2 試切法測量反向間隙
用(yòng)表測法測量反向(xiàng)間隙操作簡單方便,但在檢測中沒有包含切削力對反向間隙的影響,其(qí)結果具有一(yī)定(dìng)的局限性。為更真實準確的測(cè)得反向間隙,可采(cǎi)用試切法。試(shì)切(qiē)法測量反向間(jiān)隙主要(yào)是在模(mó)擬精加工的狀態下進行的,其(qí)具體步驟如下。
(1)將係統中反向間隙參數出初始值設(shè)置為 0(FANUC係(xì)統中為1851號(hào)參數);
(2)安(ān)裝好刀具和工件,加工如(rú)圖1(1)所(suǒ)示台階(jiē)軸,毛坯直徑為φ20,工件坐標係設(shè)在工件右端麵的中心。
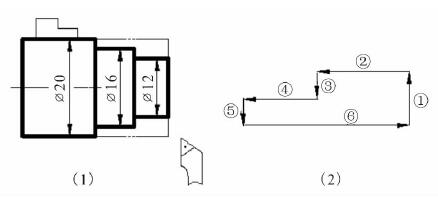
圖1 試切法測量反向間隙
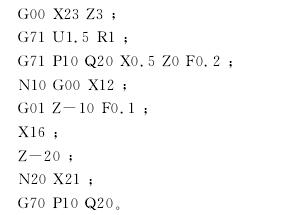
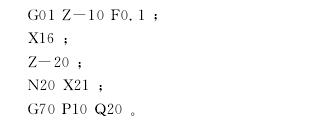
(3)用 G71和 G70配合,對該軸的外輪廓進行粗、
精加工其具體程序如下:
其精(jīng)加工走刀路線如圖1(2)所示,可以看 出 在 X方向上,步驟①和(hé)步驟③的反向相反,會引入反向間隙,步(bù)驟③和步驟(zhòu)⑤的方向相同,不存在反向間隙。
(4)由於步驟①和步驟③之間引入了反向間隙,而步驟③和步驟⑤之間沒有反向間隙,導致直徑尺寸φ12和φ16的尺寸偏差不一(yī)致,如果忽略其他(tā)因素不計,其偏差即為 X方向反向(xiàng)間(jiān)隙。
(5)同樣,在Z方向上,由於步驟②和步驟⑥的方向相反,會(huì)引入反向(xiàng)間隙,導致Z方向尺寸偏差不一致,如果(guǒ)忽(hū)略其他因素不(bú)計,其偏差數值即為Z向的反(fǎn)向間隙。
(6)為保證測量的準(zhǔn)確性,可進行多次測量,取平均值,將所測的(de)平均值輸入到對應(yīng)的參數中。
5、補償方法
通過上麵的步驟測得(dé)反向(xiàng)間隙(xì)後,可通過反向間隙補償減小其(qí)對機(jī)械加工的影響。反向間隙補償可(kě)通過(guò)軟件和硬件補償兩種方式實現(xiàn)。
5.1 硬件補償
硬件補償主(zhǔ)要是通過對(duì)進給係統傳動鏈中的各個機械(xiè)部(bù)件進行調整以減小和消除(chú)反向間隙,因此又稱為機械調整補償法。具體調整對象和措施為:調整滾珠絲(sī)杠(gàng)副,提高其固(gù)定軸承的連(lián)接精度、調製其鎖緊螺母的鎖緊力調(diào)整反向間隙;調整(zhěng)絲杠和電機,主要是對兩者連接的彈性聯軸器做出調整,提高(gāo)其連接精度。硬件補償可以通過機械調整消除大部分由於(yú)機(jī)械部件之間的相對位移引起的反向間隙。但此種(zhǒng)調整方法要對機(jī)械(xiè)部(bù)件進行裝拆操作麻煩,且對調整者技術要求較高,一般隻有在機床大(dà)修時才做此調整。
5.2 軟件補償
軟件補(bǔ)償法按照是由係(xì)統(tǒng)參數補(bǔ)償還是程序補償分為係統參數補償法和數控(kòng)程序補償法兩種。
5.2.1 係統參數補償法
係統參(cān)數補償法是將測得的反向間隙值輸入到機床的係統參(cān)數(shù)中進(jìn)行補償(可通過機床參數說明(míng)書查得具體補償號,FANUC係統中為(wéi)1851號參數)。輸補償值生效後(hòu),進給係統在換向後會先移動一個給定(dìng)的補償值,再走程(chéng)序 指 定(dìng) 的 距 離,以 此 來 實 現 反向間隙補償。這種補償方法操作簡單,不影響 程,但存在一定的誤差。
5.2.2 數控程序補(bǔ)償法
數控程序補償法的基(jī)本思想是在編寫數控程序(xù)時,如果此段存在反向間隙,就先在此(cǐ)方(fāng)向上移動一小段距離,將反向間隙消除後再進行加工,以此來消除反向間隙。數控程序補償法避免了表測法和試切法測量反向間隙的人為和測量造成的誤差,因(yīn)此補償精(jīng)度高,但同時提高了工藝製定和(hé)編程的難度,對編程人員要求較高,一般用於不具有間隙補償功能的數控(kòng)機床或精度要求特別高的零件加工。數控程序補償法加工實例如圖2所示。
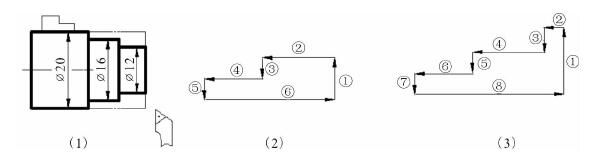
圖2 加工程序(xù)補償示意圖
如圖2(1)所示,加工一台階軸,毛坯直徑為φ20,坐標(biāo)係設置在右端麵的中心,其具體程序為:
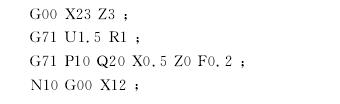
由圖2(2)可以看出,采用此種加工方法時,在 X 方向上步驟①和步驟③的反(fǎn)向相反,會引入反向間隙,而步驟③和步(bù)驟⑤的方向相同,不存在(zài)反向間隙,采用此種(zhǒng)加工方法會導致(zhì)直徑尺寸φ12和φ16的尺寸偏差不一致。同樣,在 Z方向上,由於步驟②和步驟⑥的方向相反,會(huì)引入反(fǎn)向間(jiān)隙。用數控程序補償法消除反向間隙,即在產生反向間隙的前端增加一(yī)個空走(zǒu)的程序段,改變走刀方向,將反向間隙(xì)在空走刀(dāo)段消除。針對(duì)圖(tú) 2(1)的台階軸,可采用圖(tú)2(3)的走刀路線,其(qí)具體程序為:
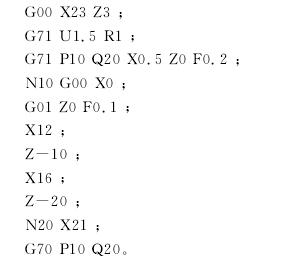
比較圖2(2)和(3)可(kě)以看出,圖2(3)增加了一段空行程,步驟②和步驟③,其中步驟②是在(zài) Z方向換向後走了一段空行程,消除 Z向反(fǎn)向間隙;步驟③是在 X 方向換(huàn)向後走了一段空行程,消除 X向反向間隙。
6、結語
反向間隙是影響零件加工精度的一個重要因素,必須(xū)引起重視(shì),由於調整後的加工(gōng)過程中機械部件的再(zài)次磨損,又會產生新的間隙,因此反向間隙需要定期測量並補償,以保證零件(jiàn)的加工(gōng)精度。另外,在進行(háng)反(fǎn)向間隙檢測時為達到理想的檢測結果,工作人員應遵循 GB/T 17121.2-2002的要求。同時,對外部環境如溫度(dù)、輻射(shè)、空氣(qì)流動性等也應滿足實際需求。
對於開環(huán)和半閉環控製係統的數控機床來說,由於其不能(néng)直接檢測機(jī)床的實際位移量,為(wéi)進一步提高其加工精度,采用反向間隙(xì)補償可顯著提高其定位精度(dù)和重複定位精度。實踐表明,通過機(jī)床的誤差(chà)補償可使加工誤差減少60%~80%。對(duì)於閉(bì)環控製係統的數控機床來說,由於其本身具有檢測反饋裝置,可(kě)直接進行檢(jiǎn)測出各(gè)項誤差然後(hòu)進行補償,所以采(cǎi)用反向間隙補償效果不明(míng)顯,但通過補償可進一步提高控製係統的動態特性。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎(yíng)聯係本網編(biān)輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎(yíng)聯係本網編(biān)輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業界視點
| 更多
查")
行業數據
| 更多(duō)
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分地區金屬切削(xuē)機床產量數據
- 2024年(nián)11月 軸承(chéng)出口情況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新能(néng)源汽車產量數據(jù)
- 2024年11月 新能源汽車銷量情(qíng)況
- 2024年10月(yuè) 新能源汽車產量(liàng)數據
- 2024年10月 軸承(chéng)出口情況
- 2024年10月 分(fèn)地區金屬切削機床(chuáng)產量數據
- 2024年(nián)10月 金屬切削機床產量數據
- 2024年9月 新能(néng)源汽車銷量(liàng)情(qíng)況
- 2024年8月 新能源汽車產(chǎn)量數據
- 2028年8月 基本型乘用(yòng)車(轎車)產量數據
博(bó)文(wén)選萃
| 更多