


齒輪滾銑複合加工實驗裝置控製係統開(kāi)發
2019-11-22 來源:武漢大學 動力與(yǔ)機械學院 作者:劉照 何珊 潘衛平 王堂輝
齒輪(lún)加(jiā)工(gōng)方(fāng)法是機械原理等課程的教學難點,僅靠齒輪範成儀等(děng)教具(jù),學生很難直觀深入地了解齒輪加工全過程。滾齒機等專用齒輪加(jiā)工設備(bèi)往往(wǎng)學校又不具(jù)備,因此有些學校采(cǎi)用軟件模擬來展示這一加(jiā)工過程,這不利於學生深刻體會漸開線的形成過程。還有一些學(xué)校研製了專(zhuān)門的滾齒設備來實現齒輪範成法加工,但這些設備通常隻具有展成法加工而沒有成形法加(jiā)工,學生不易(yì)理解這兩種加工方法的差別。如果能夠把(bǎ)這(zhè)兩種加工方法集成在一台實驗裝(zhuāng)置中實現,可大大增強學生對不同齒(chǐ)輪加工方法的認知。本文(wén)主要研究該裝置中與機械本體配套的控製係(xì)統軟硬件開發,該控製係統用來實現齒輪滾銑複合加工中各傳動機構(gòu)的(de)運動(dòng)控製、加工(gōng)方法選擇、參數設置和加工過程監控。
1、實驗裝置構成(chéng)與控製係統設計要求
該實驗裝置機(jī)械本體結構如圖 1 所示(shì),主要由工作台、刀具傳動機構 1、工件分度機構 2、工作台軸向進給傳動機構 3、手輪(lún)、步進電機、編碼器(qì)等組成。該裝置(zhì)最大特色是滾刀與銑刀都安裝在一根軸上,隻要通過垂向手輪和橫向工作台手輪來調整工件相對刀具的位置,就可以分(fèn)別實現齒輪的展成法加工和成形法加工。為了說明該實驗裝置加工原理(lǐ),這裏給出(chū)傳統的齒輪展成法加工與成形法加工原理。從圖 2 ( a) 中可知,齒輪的展成法加工是依靠滾刀(dāo)轉動 B11、輪(lún)坯轉動 B12共同形成的(de)展成運動及滾刀相對輪(lún)坯的軸向(xiàng)進給(gěi)運動 A2來實(shí)現的; 該實驗(yàn)裝置中則通過控(kòng)製(zhì)主軸、分齒驅動和工作台進給這 3 個電機,來實現機構 1~機構 3 的運動合成,最終實現齒(chǐ)輪漸開線齒廓的加工。從(cóng)圖 2 ( b) 可知,齒輪的成形法加(jiā)工是依靠盤銑刀的主切削運動、刀具相對工件的軸向進給運動及分齒運動實現的; 該裝置中則通過控製機構(gòu) 1 與機構 3 的同步運動和機構 2 的間歇運動,來實現每個輪齒的加(jiā)工。
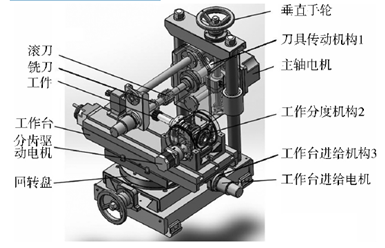
圖 1 齒輪滾銑(xǐ)複合加工實驗裝置三維圖(tú)
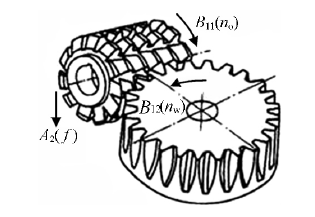
(a) 齒輪展成法加工原理圖
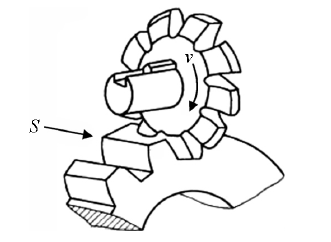
(b) 齒輪成形法加工原(yuán)理圖
圖 2 齒(chǐ)輪加工原理(lǐ)圖
從齒(chǐ)輪的展成法與成形法加工原理可知,為達到加工所需的運動(dòng)要求,所開發的控製係統必須能(néng)夠實現這 3 個傳動機構的驅動控製,並且(qiě)實現刀具轉速、工件轉速(sù)和工(gōng)作(zuò)台橫向(xiàng)進給速度的同步控製。此外,該係統還須(xū)具備簡潔直觀的人機界麵,以實現加(jiā)工方法選擇、加工參數設定和加工過程監控。
2、控製係統方案設計
考慮到上述控製(zhì)係統設計(jì)要求,對(duì)比(bǐ)各種控製器如單片機、DSP 和 PLC 等,並(bìng)綜合考慮成本、可靠性和功能靈活性,最終選擇了以步進電機為執(zhí)行機(jī)構、PLC 為底層控製平台、觸摸屏為人機界麵的(de)開環控製係統方案,如圖 3 所示。控製係統硬(yìng)件核心選擇三菱 FX3U-32MT/ES,該款 PLC 有16 路輸入和 16 路輸出,其中 3 路 100 k Hz 的(de)高(gāo)速輸(shū)出信號 Y0、Y1、Y2 分別用來提供(gòng)驅動該實驗裝置中刀具、工作台軸向進給和工件分度步進電機的脈衝信號,6 路 100 k Hz 高速計數輸入信號 X0~ X5分別用來連接 3 個光電編(biān)碼(mǎ)器的輸入信號,3 個編碼器(qì)分別用來檢測 3 個步進電機的轉速。多餘的PLC 輸入輸出點數適當(dāng)考慮了以後的(de)應用擴展。觸摸屏用來選擇加工方法、設(shè)置加工參數和監控加工過程(chéng),該裝置選用威綸通(tōng)TK6070ip。
3、硬件接口設計
該實(shí)驗裝置控製係統硬(yìng)件設計主(zhǔ)要包括 PLC與步進電機(jī)驅動器、編碼器的接口設計以及 PLC與(yǔ)觸摸屏的通信連接。控製(zhì)係統主接線圖(tú)如圖 4 所示,其中驅動器 1~ 驅動器(qì) 3 分別(bié)是刀具主軸(zhóu)、工作台軸向進給和工件分(fèn)度(dù)步進電機的驅動器。編碼器 1~ 編碼器 3 分別是工作台軸向進給機構、刀具(jù)軸和工件分度機構的編(biān)碼器。觸摸屏與 PLC 之間采用了 RS-485 4 W 通信電(diàn)纜(lǎn)進行通信。X10 是啟動按鈕,X11 是停機按鈕(niǔ)。下(xià)麵簡要介紹各部分接口設計。
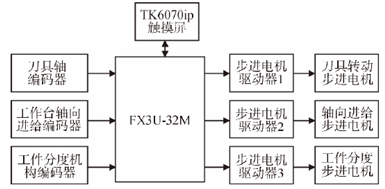
圖 3 控製係統方案設計(jì)
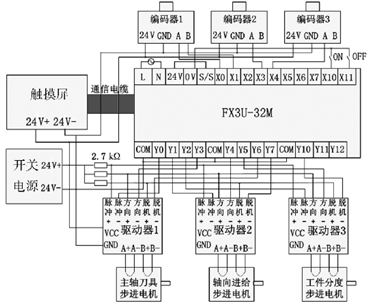
圖 4 控製係(xì)統硬件設計組(zǔ)成
3. 1 PLC 與步(bù)進電機驅動器接口
該實驗裝置中的 3 個步進電機都采用 57 係列兩相步進電機,配套的驅動(dòng)器選用了 ZD - 6560 -V4。該(gāi)驅(qū)動器與 PLC 的接線方法分為共陽極和共陰極兩種,本文係統采用的是共陽極信號輸入,對應的接線如圖 4 所示。其(qí)中 FX3U 的高速輸出端子 Y0~ Y2 分別接主軸電機驅動器 1、工作台軸(zhóu)向進給電機驅動器 2 和工件分度(dù)電機驅動器 3 的脈衝負端子,FX3U 的 Y3~ Y5 端子分別接3 個驅動器的方向負端子,FX3U 的 Y6 ~ Y7 和 Y10 分別接3 個驅動器的脫機負端子(zǐ)。如圖 5 所示,隻給出了主(zhǔ)軸步進電(diàn)機驅動器 1 與 PLC 的接口,其他兩個驅動器(qì)接(jiē)口雷同。圖 5 中驅動(dòng)器的脈衝負端子接PLC的高速輸出端口 Y0,驅動器的方向負端子接 PLC的(de) Y3 端口,驅動器(qì)的脫機負端子接 PLC 的 Y6 端口。驅動器的 A+、A-、B+、B-端子則分別接步進電機的兩相繞組。在驅動器的脈衝正、方向正和脫機正端子與 24 V 電源正之間,需串聯一個2. 7 kΩ 限壓電阻。
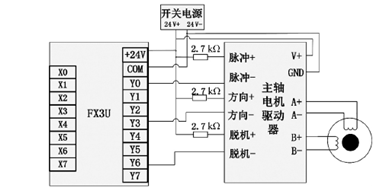
圖 5 PLC 與步進電機接口
3. 2 PLC 與編碼器接口
由於工作台的(de)軸向進給運(yùn)動有正反兩個(gè)方向,PLC 必須采用雙向雙輸入計數,而刀具主軸(zhóu)和(hé)工(gōng)件分度機構都是單向旋轉的,隻要采(cǎi)用單相單輸入計數即(jí)可。為了供電方便,所有的編碼器(qì)都選用歐姆龍的E6A2-CWZ5C 型編碼器,其供電電壓都(dōu)是 24 V,具體接線如圖 6 所示。FX3U 的 X0、X1 端子分別接工作台(tái)軸向進給機構編碼器的 A、B相端子,FX3U 的 X3、X4 端子分別接主軸編碼器和工件分度機構編碼器的 A 相端子。
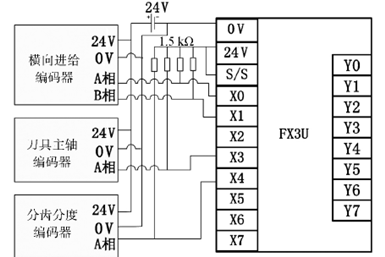
圖 6 PLC 與編(biān)碼(mǎ)器接口
3. 3 PLC 與觸摸屏通信(xìn)接口
控製係統人(rén)機界麵———觸(chù)摸屏 TK6070ip 有兩個 COM 口, 其 中 的 COM1 口為 RS232 接(jiē) 口,COM2 口為 RS485 通信接口(kǒu),係(xì)統設(shè)計中采(cǎi)用COM2 口與 FX3U 通信,連接方式如圖 7 所示。
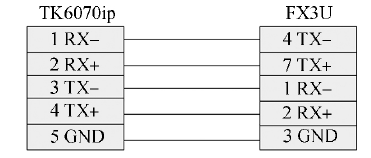
圖 7 PLC 與觸摸屏接(jiē)口
4、軟件設計(jì)
控製係統軟件主(zhǔ)要包括後台 PLC 控製程序和前台觸摸屏程序兩部分。PLC 控製程序負責實現齒輪滾銑複(fù)合加工實驗裝置的運動控製; 觸(chù)摸屏(píng)程序則實(shí)現人機交互,如齒輪加工(gōng)過程的監控和加工參數設置(zhì)。
4. 1 PLC 控製軟件設計
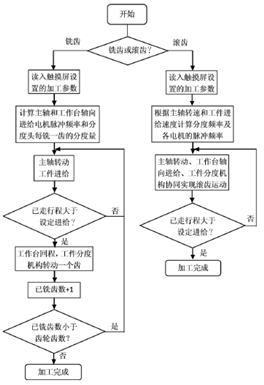
圖 8 PLC 控製軟件流程圖
該實(shí)驗裝置的 PLC 控製係統軟(ruǎn)件(jiàn)主要(yào)包括滾齒和銑齒兩(liǎng)個分支程序,分別用來實現(xiàn)齒輪的展成法(fǎ) 加 工 和 成 形 法 銑 削。軟 件 采 用 三 菱 GX -Works2 編程,PLC 控製軟件主要流程如圖 8 所示。這裏僅以滾齒加(jiā)工為例,說明(míng) PLC 控製刀具主軸、工件分度和工作台軸向進給 3 個步(bù)進電(diàn)機的同步運(yùn)動,從而(ér)實現滾齒加工過程(chéng)的運動控製部分代碼,如圖 9 所示。該梯形圖中(zhōng)分別通過可變速脈衝輸出指令 PLSV 來驅動主軸(zhóu)和分度電機的運行,相對定位指令 DRVI 來驅動(dòng)軸向進給電機的運行。其中,M10 是總開關(guān),D0、D8 分別對應於(yú)主軸和分度電機的脈衝頻率,它(tā)們確定了(le)這兩個電機的旋(xuán)速度,Y0、Y3 分別對應於主軸電機 PLC 控製輸出的(de)脈(mò)衝和方向端子,Y2、Y5 分別對應於分(fèn)度電機PLC 控製輸出的脈衝和方向端子。D12、D4、Y1、Y4 分別對應於軸向進給電機的脈衝數、脈衝頻率、該電機 PLC 控製輸出的脈衝和方向端子。
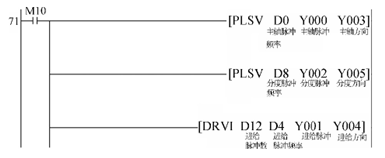
圖 9 PLC 梯(tī)形圖部分代碼
4. 2 觸摸屏界麵設計
觸摸(mō)屏界麵采用威綸通觸摸(mō)屏軟件 EB8000 設計,主要界麵(miàn)包括展(zhǎn)成法加工界麵(miàn)、成形法加工界(jiè)麵和步進電機控製界(jiè)麵,如圖 10 所示,分別用來實現展成法加工、成形法加工和步進電機驅動控製演示(shì)實驗。其中展成法加工斜齒輪的參數設置與加工過程監控分別如圖 11 和圖 12 所示。該齒輪複合(hé)加工實驗裝置已完成開發,並在機械原(yuán)理課程中得到(dào)了(le)應用,如圖 13 所示。

圖(tú) 10 加工方法選擇界麵
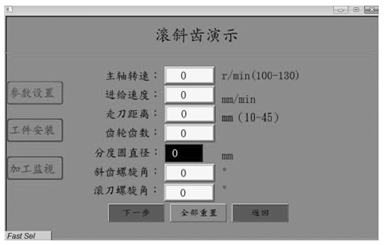
圖 11 加(jiā)工(gōng)參數設置界麵
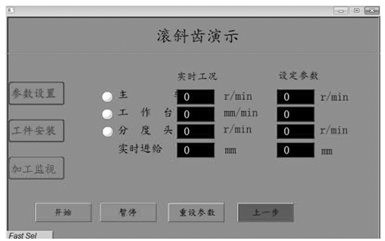
圖(tú) 12 加(jiā)工過程(chéng)監控界麵
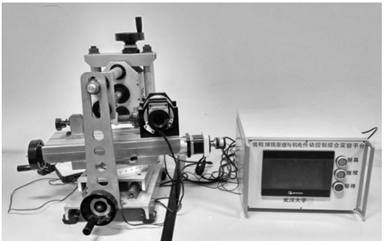
圖(tú) 13 齒輪複合加(jiā)工實驗裝置實物圖(tú)
5、結束語
實踐表明,該實驗裝置運(yùn)行可靠、界麵直觀(guān)、操作方(fāng)便、控製硬件精簡,控製係統完全達(dá)到了設計功能要求。該實驗裝置不僅(jǐn)可用於機械原理、金屬切削機床等課程中加深學生對齒輪展成法(fǎ)和成形法加(jiā)工方法的理解,而且該裝(zhuāng)置(zhì)還可用於機電(diàn)傳動控製等課(kè)程(chéng)中對步進電機(jī)的驅動控製和(hé) PLC編程的實(shí)驗教學(xué)。
投稿箱:
如果您有機床行業、企(qǐ)業相關新聞稿件發表(biǎo),或進(jìn)行資訊合作,歡迎聯係本網(wǎng)編輯部, 郵(yóu)箱:skjcsc@vip.sina.com
如果您有機床行業、企(qǐ)業相關新聞稿件發表(biǎo),或進(jìn)行資訊合作,歡迎聯係本網(wǎng)編輯部, 郵(yóu)箱:skjcsc@vip.sina.com
更多相關信(xìn)息

業界視點
| 更多

行業(yè)數據
| 更多(duō)
- 2024年11月 金屬切削(xuē)機(jī)床(chuáng)產量數據(jù)
- 2024年(nián)11月 分地(dì)區金屬切削機床產(chǎn)量數據(jù)
- 2024年11月 軸承出口情況
- 2024年11月 基本(běn)型乘用車(轎車)產量數據
- 2024年11月 新能(néng)源汽車產量數據(jù)
- 2024年11月(yuè) 新能源汽(qì)車銷量情況
- 2024年(nián)10月 新能源汽車產量數據(jù)
- 2024年10月 軸承出(chū)口情況(kuàng)
- 2024年10月 分地區金屬切削機床產量數據
- 2024年10月 金屬切(qiē)削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產量數據(jù)
- 2028年(nián)8月 基本型乘用車(轎車)產量數據
博(bó)文(wén)選萃
| 更多