



分步體對角線誤差辨識及空間誤差補償
2018-3-9 來源:同濟大學中德(dé)學院 . 沈(shěn)陽(yáng)機(jī)床研究(jiū)院 作者:樊留群 張潔 虞(yú)敏 趙建華
摘(zhāi) 要: 基於(yú)分步體對角線的誤差測量方法是(shì)一種快速、高效的測量方法(fǎ). 提出一種基於該測量方法的誤差元素辨識算法,該(gāi)算法對現有的(de)分步體對角線誤差(chà)辨識(shí)算法做了修正,並根據(jù)辨識出的誤差對機(jī)床進行(háng)空間誤差補償,經過實際機床的測試驗證,證(zhèng)明該方法的正確(què)性和有效性.
關鍵詞: 分步體對角線測量法(fǎ); 誤差辨識; 空間誤差補償
0 引 言(yán)
機床(chuáng)的(de)各種誤(wù)差最終反映為刀具中心點的空間軌跡與理論空間軌跡的(de)差別 這 一空間誤差由 4 部分組成.
1) 在無負荷或精加工(gōng)條件下(xià)機(jī)床的幾何 / 運動誤差.
2) 由機床(chuáng)內部熱源(yuán)和環境溫度變化而造成的熱誤差,
3) 由切削力和慣性力引起的動態誤差.
4) 與夾具和裝夾有關的誤差(chà).
這 4 種(zhǒng)誤差並非完全孤立的,相互有一定的關(guān)聯(lián),其中幾何/運動誤差(chà)的測量、分析與補(bǔ)償是研究機床加工誤差的基礎,現代數控係統不僅實現了單軸螺距誤差(chà)補償,像西門子等高檔數控係統(tǒng)還實現了空間誤差補償.
1 、分步體對角線誤差(chà)辨識算法
分步對(duì)角線測量法是獲取機床空間誤差的快速有效 的方法,在《數控(kòng)機床誤差(chà)實時補償技術》和(hé)《數(shù)控 機床誤差補償關鍵技術及(jí)其應用》中給出了(le)分步對角線(xiàn)測量法的詳細推導過程,但在實際測試並根據此方法進行補償時,補償效果不理想。
本文根據分步對角線測量方法,重新推導了(le)誤差元(yuán)素辨識算(suàn)法,提出了分(fèn)步體對角線誤差補(bǔ)償(cháng)算(suàn)法公式,並在實際中獲得了(le)很好的補償效果.
1. 1 分步對角線(xiàn)測量法原理
美國光動公司提出了基於多(duō)普勒位移測量儀和向量測量技術的“分步空間對角線測(cè)量法”,其原理(lǐ)是分步測量機床加工空間的 4 條體對角線,也(yě)就是由測量(liàng)起始點起,分步地移動一個控製軸,每次(cì)的移動軸依 X → Y → Z 的順序進行移(yí)動與暫停( 獲取坐標位置用) ,機床部件的運動是斷續的、且其軌跡(jì)與激光束不平行,但最終抵達對角線的終點將這些對角線分別記(jì)為 PPP,NPP,PNP,PPN其(qí)中 P 表示(shì)正方向,N 表示負方向,PPP 表示沿 X,Y,和 Z 軸的正方向運動. NPP 表示沿 X 軸負方向、沿 Y 軸和 Z 軸的正方向運動. 具體的操作如下: 先校準(zhǔn)激光束的方向,使之平行(háng)於體對角線方向; 將反射鏡通過磁性(xìng)座安裝在主軸上(shàng),然後就可分別沿指定方向( X 或 Y 或 Z 方(fāng)向) 移動運動軸,並在對(duì)角(jiǎo)線上(shàng)測量運動距離(lí). 以 PPP 方向對角線為例,運動軸首先從起點 O 開始沿 X 正方向運動到達頂點 1,測量沿(yán)對角線 PPP 方向移動的距離; 再沿 Y 正方(fāng)向運動到達
2 並測量運動距離; 最後沿 Z正向移動到達 3 並測(cè)量運動距離,同理(lǐ),對其(qí)餘三條對(duì)角線進行測量.
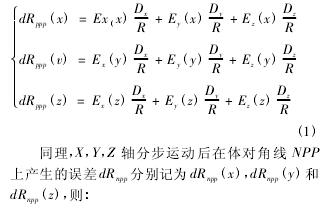
1. 2 參考文獻中分步對角線測量法的誤差辨(biàn)識算法在分步體對(duì)角線測量過程中,X,Y,Z 軸分步運動後在體(tǐ)對角(jiǎo)線 PPP 上產生的誤(wù)差 dRppp分別記為dRppp( x) ,dRppp
( y) 和 dRppp( z) ,Ey( x) 表示(shì)沿括號中的(de)軸( x) 方向運(yùn)動在(zài)下標( y) 軸方向引起的誤差 . 根據參考文(wén)獻《數(shù)控機床誤(wù)差實時補償技術》則有下式:
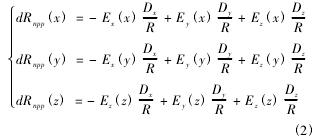
同理,在也可求出另外兩條(tiáo)對角線上產生的誤差,最後求解出各坐標軸在 x,y 和(hé) z 方向產生的誤差:

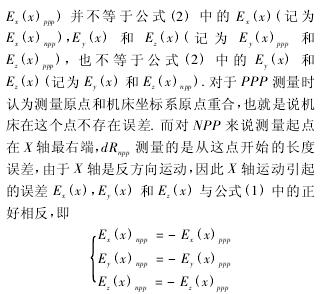
1. 3 分(fèn)步對角線測量(liàng)法的誤差辨識算法修正說明在(zài)公式推導中,公式 ( 1) 中的(de) Ex( x) ( 記為:


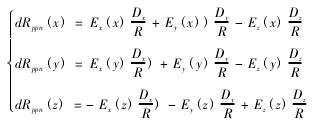
聯立上述 12 組(zǔ)公式,可得出基(jī)於分布體對角(jiǎo)線測量方法的誤差元素求解公(gōng)式:

2 、修正算法的實驗驗證
為了驗證本(běn)文提出的算法的(de)正確性和有效性,基於沈陽機床的 VMC0656 加工中心(xīn),采用分步體對角線方法對機床進行測量,然後按照本文修正算法進行誤差辨識,並(bìng)采用空間誤差補償將補償值加載到 VMC0656 的控製器沈陽機床自(zì)主開發的 I5數控係統(tǒng)中,然後進行測量(liàng). 為了進一步進行驗證還分別進行了單軸螺(luó)距誤差的(de)測量與(yǔ)補償以及混合補償( 定位誤差采用單軸螺補,直線度誤差采用(yòng)分步體對角線測量方(fāng)法得到(dào)的補償值) ,補償後在進行測量,並計算了這幾種方法的方差. 表 1 和(hé)圖4 是 Y 軸的實驗結果,
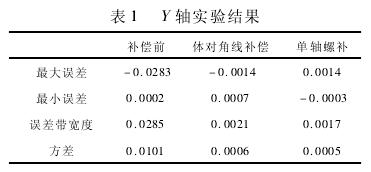
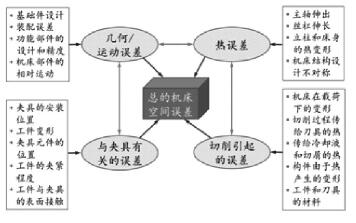
圖 1 機床 Y 軸補償實驗(yàn)結(jié)果
表 2 Z 和圖 2 為(wéi) Z 軸實驗結果
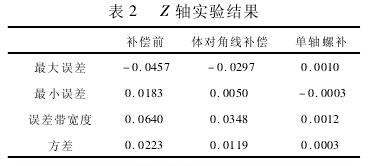
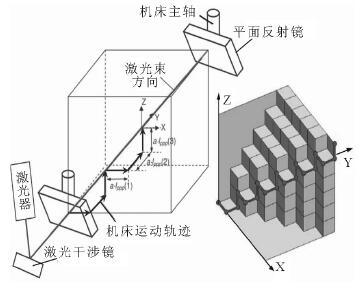
圖 2 機床 Z 軸補償實(shí)驗結果
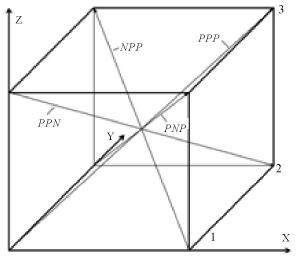
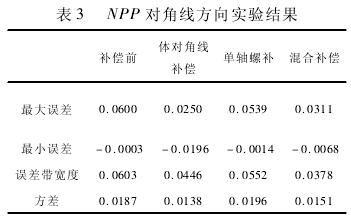
圖 3 NPP 對角線方向實驗結果
表 3 和圖(tú) 3 為 NPP 對角線方向實(shí)驗結果(guǒ)
3 、結 論
在分步體對角線測量方法及誤差元素辨識算法基礎上(shàng),提出誤差辨識算法,實驗數據證明該算法能較好的對機床空間誤差進行補(bǔ)償. 從測量結(jié)果可以看出(chū),體對(duì)角線補償方法雖然在(zài)單軸定位誤差方麵沒有單軸螺距誤差補償精度高,但綜合定位誤差和直線度誤差的空間誤差補償(cháng)方麵(miàn),體(tǐ)對角線(xiàn)方法的(de)效果最好。
投稿箱:
如(rú)果您有(yǒu)機(jī)床行業、企業相關新聞稿件發表,或進行資訊(xùn)合作,歡迎聯(lián)係(xì)本網編輯部, 郵箱:skjcsc@vip.sina.com
如(rú)果您有(yǒu)機(jī)床行業、企業相關新聞稿件發表,或進行資訊(xùn)合作,歡迎聯(lián)係(xì)本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點
| 更(gèng)多

行業數據
| 更多
- 2024年11月(yuè) 金屬切削機床產量數據
- 2024年11月 分地區金屬切削機床產(chǎn)量數(shù)據
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產量數據(jù)
- 2024年11月 新能源汽車產量(liàng)數據
- 2024年(nián)11月 新(xīn)能源(yuán)汽(qì)車銷量情(qíng)況
- 2024年10月 新能源汽車產量數(shù)據
- 2024年(nián)10月 軸(zhóu)承出口(kǒu)情(qíng)況
- 2024年10月 分地(dì)區金屬切削機床產量數據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源汽車銷(xiāo)量情況
- 2024年8月 新能源汽車產量數據
- 2028年(nián)8月 基本型乘用車(轎車)產量數據
博文(wén)選萃
| 更多