機床")



數控車床綜合熱誤(wù)差(chà)建模及工程應用
2018-1-26 來源: 機械製造係統(tǒng)國家實驗室 河北(běi)工程大學 作者:孫誌超 侯瑞生 陶濤 楊軍 梅雪鬆 王新
摘 要: 針對車床實際工程應用中主軸與進(jìn)給軸(zhóu)綜合誤差對工件加工精度產(chǎn)生(shēng)影響問題(tí),建立包含工件膨脹效應的主(zhǔ)軸(zhóu)與進給軸綜合熱誤差模型,並進行實際(jì)切削驗證. 以精(jīng)密車床為研究對象,綜合分析車床主軸、進給軸和工件在實際加工中的相互影響關係,並建立(lì)三者之間的綜合熱誤差多元(yuán)線性回歸模型(MLRA). 實(shí)驗(yàn)結果表明(míng):含有工件膨脹效應(yīng)係數的綜合(hé)熱(rè)誤差(chà)模型符合實際工況(kuàng),有效提高了車床的加工(gōng)精度. 主軸熱(rè)誤差模型的預測精度達85%以上,進(jìn)給軸預測精度達70%以上,實際加工中工件誤(wù)差由15 μm 降低到5 μm 左右. 綜合熱誤差模型顯著提高了高精密數控(kòng)車床的加工精度.
關(guān)鍵詞: 數控車床;主軸;進給(gěi)軸;工件膨脹效應;熱誤差建模;熱誤差補償
車床在軸類及盤類零件(jiàn)加工中占有顯要位置,我國數控車床主要存在精度低、精度保持性差等問題,影響機床精度(dù)的關鍵因(yīn)素之一熱誤差占據機床總體誤差的40% ~70%[1] ,而對於高精密數控車床(chuáng)來說所(suǒ)占比重更大. 近年來,國內外針對機床熱特性的研究不勝枚舉,也取得了一些良好的效果. 楊軍等[2-5] 利用模糊聚類(lèi)選擇溫度(dù)變量(liàng),建立了機床主軸熱誤差的BP 神經網絡模(mó)型、多元線性回歸模型、最小二乘支持向量機模型及時間序(xù)列模型,並在多(duō)種工況下驗證模型的準確性及魯棒性(xìng);還有學者通過實驗反求熱流密度和熱輻射等邊界條件,提高機床熱變形的(de)仿真精度[6-8] ;Bossmanns 等[9-10] 利(lì)用有限差(chà)分模型分析並(bìng)預(yù)測了電主軸熱源的分(fèn)布機理;Aguado[11] 提出(chū)機床空間誤差的測量方法;Heisel等[12] 研究(jiū)絲杠溫度場分布,並建立了進給軸(zhóu)熱誤差模(mó)型;Guo 和Shen 等[13-14] 利用不同的算法對(duì)BP 神(shén)經網絡模型進(jìn)行了優化,提高了模型精(jīng)度;徑向基函數(shù)RBF(Radius Basis Function)的神經網絡模型被廣泛用於機床熱誤差建模中[15-16] ;Chen 等(děng)[17-19] 建立了主軸係統(tǒng)的多元線性回歸模型.
現有(yǒu)文獻都是針對主軸或進給軸單個係統分別建立模型,而且都(dōu)是在理論上驗證模型的準確性和魯棒性,沒有進行過實際的加工驗證,實際加工中主軸與進給軸相(xiàng)互(hù)依賴共同(tóng)影響工件的加工(gōng)精度. 本文針對(duì)HTC550/500 車床建立主軸與進給軸的綜合熱誤差模型,並進行(háng)補償應用,並用實際加工來驗證模型的準確性.
1、 Siemens 係統熱誤差補償方式(shì)及熱特性實驗
1.1 Siemens 係統熱誤差補償方式
Siemens 開放了熱(rè)誤差補償接口,一(yī)定溫度下所開放的補償模型為線性模型,主軸的熱誤差隻與溫度相關,與坐標位置無關;進(jìn)給軸熱誤差不僅與溫度相關,且與坐標位置相關. 熱(rè)誤差模型原理圖如圖1所示.
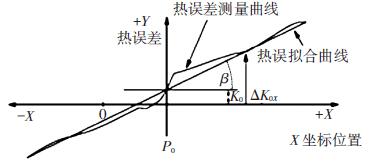
圖1 熱誤差補償原理:溫度θ 下熱誤差的近似擬合線
Siemens 內部模型:
1.2 熱特性實驗
1.2.1 實驗原(yuán)理(lǐ)及方法
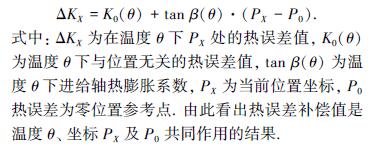
以精密數控車床為研究對象,測試(shì)設備包括(kuò):RENISHAW 激光幹涉儀測量進給軸誤差;自主設計的溫度與位移同步采集係統(tǒng)測得溫度及變形數據(jù);傳感器選用高精密溫度傳感器PT100 和高精密電渦流傳感器. 采用五點法測量主(zhǔ)軸(zhóu)空間變形[ 20] ,原(yuán)理如圖2 所示.
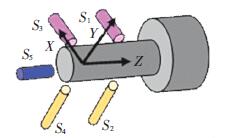
圖2 主軸(zhóu)熱誤(wù)差測量原(yuán)理示意(yì)圖
S1、S3 為(wéi)測量(liàng)主(zhǔ)軸X 方向的(de)熱誤差, S2、S4 為測量主軸Y 向的熱誤差(chà), S5 測量主軸Z 向的熱誤(wù)差;文獻4 中(zhōng)詳細介紹(shào)了利用(yòng)激光幹涉儀測量進給(gěi)軸熱誤差的測量方法及注意事項(xiàng),冷態下第一次測量進給軸誤差為機床進給係(xì)統幾何誤(wù)差,進給係統連續(xù)往複運行20 min 後測量誤差值(zhí),此誤差值減去幾何誤差作為此時進給(gěi)係統(tǒng)熱誤差[4] .
1.2.2 熱特性分析
進給軸電機、軸承(chéng)、絲杠螺母副等摩擦生熱導致絲杠溫度升高,絲杠向自由端方向發生熱膨脹引起絲杠導(dǎo)程變化. 絲杠導程(chéng)變化導致半閉環控製係統(tǒng)產生(shēng)誤差,進給軸的熱誤(wù)差變化如圖3 所示. 冷態下(xià)第1 次測量值為(wéi)機床的幾何誤差,故冷態下機床的熱誤(wù)差為0 μm. 由圖(tú)3 可以看(kàn)出,進(jìn)給軸熱誤差不僅與溫度相關,而(ér)且與坐標位(wèi)置相關,隨坐標(biāo)值的增大而增大;負向熱誤差變化相對較(jiào)小(xiǎo),正向熱誤差變化相對較大,由(yóu)此(cǐ)判斷正向為進給軸自由(yóu)端,即(jí)絲杠熱膨脹(zhàng)的(de)方向.
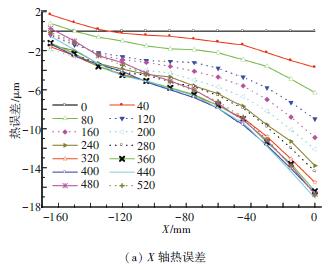
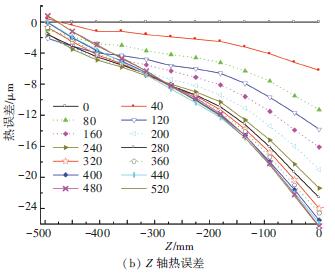
圖(tú)3 進給軸熱誤差曲線(xiàn)
主軸內部結構如(rú)圖4(a)所示,軸承摩擦(cā)生熱,引起(qǐ)主軸及外殼溫度升高,導致主軸發生熱伸長Δz和熱升高Δh. 主軸熱變(biàn)形曲線如圖4(b)所示,主軸Z 向(xiàng)熱誤差Δz 最高達44 μm, X 向熱誤差Δx 最高達14 μm,隨(suí)著溫度的升高,主軸的熱變形隨之增大,停機(jī)後隨(suí)著溫度的降低主軸的熱變形隨之(zhī)減(jiǎn)小.
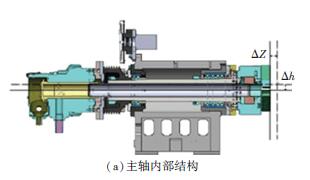
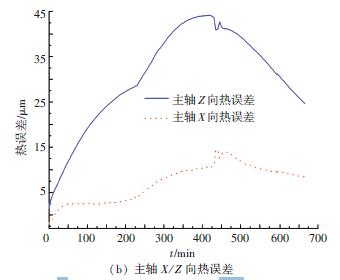
圖4 主軸結構(gòu)示意圖及主軸X / Z 向熱誤差
機床熱特(tè)性(xìng)實驗主軸及進給軸溫度變化見圖5.
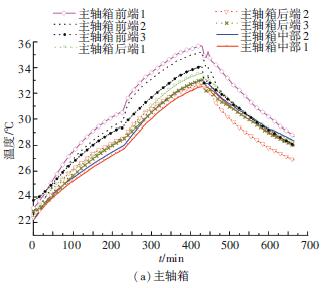
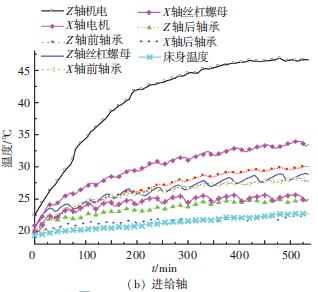
圖5 主軸與進給軸溫度(dù)場變化
主軸傳感器PT100 配置前端3 個、中部2 個、後(hòu)端3 個,前端最高溫度達35.9 ℃、後端33.8 ℃、中部32.8 ℃,其中前部(bù)最高溫差13.2 ℃、後端12.1 ℃、中部(bù)10.8 ℃. 主軸內部結構如圖4(a)所示,循環空氣冷卻中空式結構,前端3 個軸(zhóu)承後端1 個,導致前端發(fā)熱量最大,後端次之,中部最小,溫度(dù)場變化與結構相(xiàng)符合. 由圖(tú)5(a)和(hé)圖4(b)對比可(kě)看出,曲線變(biàn)化(huà)規律一致,變形與溫度之間具(jù)有一定(dìng)的線性關係.
進給軸(zhóu)傳感器PT100 配置主(zhǔ)要在電機、軸承及絲(sī)杠螺母座上,通過螺母座溫度間(jiān)接反映絲杠溫度(dù)變化. 其中,電機溫度變(biàn)化最大,床身溫度變化最小;前軸承溫度大於後軸(zhóu)承; Z 軸螺母座(zuò)溫度大於X軸(zhóu)螺母座.
2、熱誤差建模及補償實現
2.1 綜合(hé)熱誤(wù)差建模
在車床加工過程中,主軸與進給(gěi)軸熱誤差相互耦合共同影響工件(jiàn)的精度,因(yīn)此需要建立主軸與進給軸的綜合熱誤差模型.
2.1.1 主(zhǔ)軸熱誤差模型
主軸(zhóu)熱特性實驗中,電渦流傳感器的安裝位置影響測量結果,以X 向熱誤差(chà)測量為例說明. 圖6 為主軸熱特性實驗傳感器安裝主軸軸向視(shì)圖
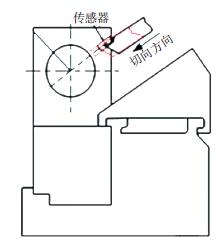
圖(tú)6 傳感器安裝主軸軸向示意圖
傳感(gǎn)器的安裝支架安裝在刀塔上. 實驗過程非恒溫,環境溫度的升高導致絲杠溫度升高,並伴隨著熱(rè)伸長(zhǎng), X 軸(zhóu)絲杠(gàng)熱伸(shēn)長導致刀塔位(wèi)置發生變化,從而引起傳感器相對於測量芯棒的位置變化,導致傳(chuán)感(gǎn)器測量主軸(zhóu)X 向熱誤差就包含了X 軸絲杠熱變(biàn)形誤差. 因此,主軸X 向熱誤差建模中要消除X 軸絲杠的熱變形誤差,處(chù)理方法:
2.1.2 進給軸熱誤差模型
由於軸承及絲杠螺母(mǔ)副(fù)摩擦發熱,絲杠(gàng)溫度升高導致進給係統產生熱誤差. 然而,在實際加工中工件也會發生(shēng)熱脹冷縮現象,同樣會影響工件的加(jiā)工精度. 圖7 為工件(jiàn)與絲杠變形示意圖. 相(xiàng)同溫度下(xià)所有工件的長度均(jun1)為L, 在相同溫(wēn)升條件下工件(jiàn)1、2、3 的膨脹量分別為Δ1、Δ2、Δ3, 絲杠在相同(tóng)長度L 上(shàng)的(de)膨脹(zhàng)量為ΔS. 當工件(jiàn)的膨脹係數<絲杠的膨脹係數,即當ΔS > Δ1 時(shí),絲杠的膨脹量大於工件的膨脹(zhàng)量,此時的補償量為絲杠與工件膨脹量的差值,方向為絲杠膨脹反方向;當絲杠的膨脹係數等於(yú)工件的膨脹係數,即當ΔS = Δ2 時,絲(sī)杠的膨脹量與工件膨脹量相同(tóng),此時絲杠的膨脹量剛(gāng)好補償了工件的膨脹量,不需要對絲杠(gàng)的(de)膨脹量進行補償;當絲杠的膨脹係數小於工件的膨脹係數,即ΔS < Δ3 時,絲(sī)杠的膨脹量小於工件的膨脹量,此時的補償量亦為絲杠與工件(jiàn)膨脹量的差值,方向為絲杠膨脹方向.因此,進給軸的熱誤差補償要考慮工件(jiàn)的膨脹效(xiào)應,補(bǔ)償方法:
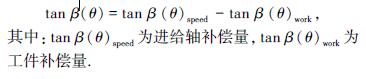
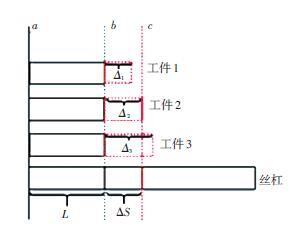
圖7 工件與絲杠(gàng)變形示意圖(tú)
2.1.3 綜合熱誤差模型
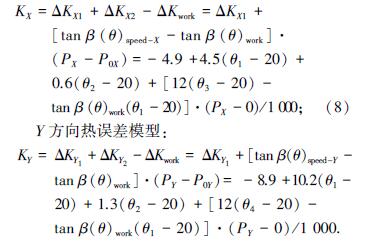
選取主軸(zhóu)及床身溫度為(wéi)溫度變量,結合MLRA方法得到如下主軸的熱誤差模型:
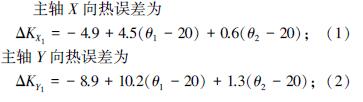
式(shì)中: θ1、θ2、θ3、θ4 分別為床身、主軸、X 軸螺母和Z軸螺母溫度; tan β (θ)speed-X 、tan β (θ)speed-Y 分別為
X、Y 軸絲杠(gàng)膨脹係數; PX 、PY 為(wéi)進給軸坐標; P0X 、P0Y 為進給軸參考點坐標值. 模型中將20 ℃作為參考溫度(dù)是因為GB 中將20 ℃ 作為檢測時標準環境溫度,機(jī)床定位精度檢測標準環境溫度(dù)亦為20 ℃.
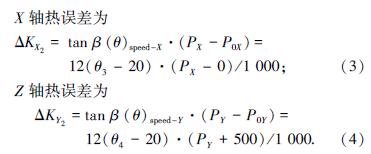
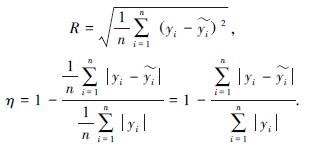
圖8、9 為主軸及X / Z 進給軸熱誤(wù)差模型預測值(zhí)與實驗值的對比圖. 建立模型預測精度評價標準均方根誤差值RMSE 及預測(cè)精度η[5] . 其中R 為均方根誤差值, yi 為實驗測量值, y~i 為模型預測值. 主軸X / Z 方(fāng)向熱(rè)誤差模型的R 和η 分別為2. 5、5.2 μm和89.4%、88.7%; X / Z 進給軸熱誤差模型的R 和η 分別為2.4、5.1 μm和84.5%、82.7%. 說明熱誤差模(mó)型有(yǒu)一定準確(què)性(xìng),應用效果還需進一步驗證.
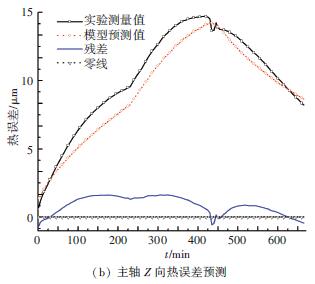
圖8 主軸熱(rè)誤差模型預測值與測量值的(de)比較
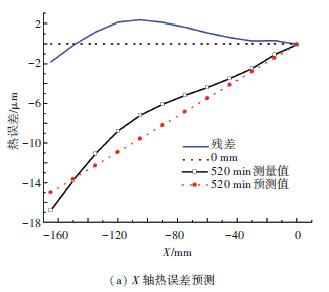
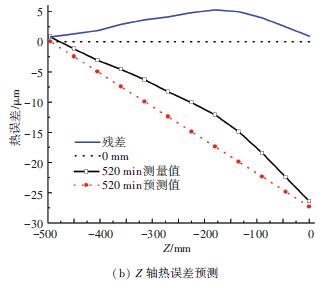
圖9 進給軸熱誤差模型(xíng)預測值與測量值(zhí)的比較
機床主軸係統與(yǔ)進給軸係統為相對獨立(lì)的個體,實際加工中二者缺一不可,軸與進給軸的熱誤差相互關聯共同影響工件的加工精度. 得到主軸(zhóu)與進給軸熱誤差的相互(hù)關係對於模(mó)型的建(jiàn)立尤為重要.主軸係(xì)統(tǒng)由於軸承(chéng)及加工摩擦生熱(rè)造成主軸(zhóu)係統溫度升高(gāo),隨之產生熱(rè)變形Δlz 、Δh, 絲(sī)杠受熱發生膨脹導致進給係統產生熱誤(wù)差Δx、Δz, 如圖10 所示.由於X 軸是傾斜式安裝,主軸熱變形Δh 在機床X方向產(chǎn)生(shēng)分量(liàng)Δlx , 方向與X 進(jìn)給軸相同(tóng);主軸熱伸長Δlz 方向與Z 進給軸方向相同(tóng). 因此機床X / Z 方向的熱誤差模型應該是主軸與進給軸的(de)綜合熱誤差(chà)模型. 結合(hé)式(1) ~(4)及文章2.2.1、2.2.2 節分析得到機床在X / Z 方向的綜合熱誤差模型.
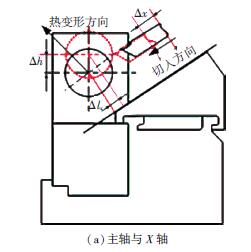
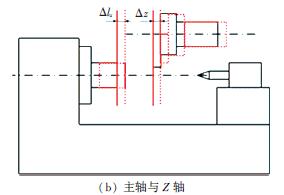
圖10 主軸與進給軸熱誤差耦合示意圖
X 方向(xiàng)熱誤差模型:
2.2 補(bǔ)償實現(xiàn)及(jí)實際加(jiā)工分析
2.2.1 補(bǔ)償實現
Siemens828D 熱誤差補償總(zǒng)體方案如圖11 所示,由PLC 直接獲取機床熱(rè)源溫度值(zhí),在PLC 內計算補償參數,最後PLC 通(tōng)過數據(jù)接口(kǒu)DB1200 將補償參數寫入NC 係統內,係統根據補償參數(shù)及插補指令計(jì)算正確的電機(jī)指令從而達到補償效果,提高(gāo)機床(chuáng)的加工精度.
冷態下測量機床的定位精度,隨(suí)後同時運轉主軸及進給軸係統,模擬實際加(jiā)工主軸與進給軸熱誤差耦合現象,驗證綜合熱誤(wù)差模型的(de)準確性,直到機(jī)床達到熱平衡狀態. 測量機床熱誤差補(bǔ)償前後的定位精度,結(jié)果如圖12 所示. 熱(rè)補償前X / Z 軸定位精度分別為19.8 μm、27.2 μm;熱補償後X / Z 軸定位(wèi)精度分別為6.9、9.1 μm,熱補償後X / Z 軸定位精度分別提高了65.2%、68.4%,表明熱誤差(chà)綜合模型有一定的補償效果.
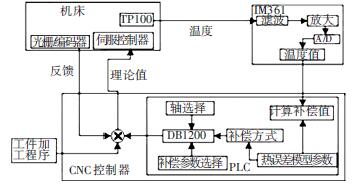
圖11 Siemens828D 熱誤(wù)差(chà)補償總體方案
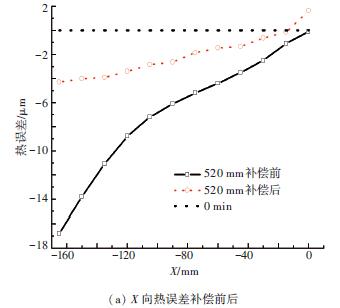
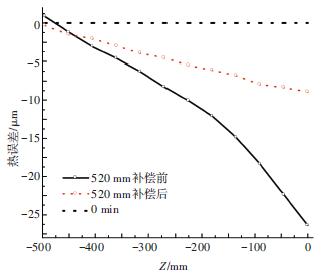
圖12 X / Z 軸熱平衡下熱誤差補償前後對比
2.2.2 實際加工分析
加工(gōng)工件如圖13 所示(shì),嚴格按照工程實際在有無熱誤差補償狀態下按圖紙要求進(jìn)行加工,兩種狀態下各加工(gōng)一天,對工件按照(zhào)加工順序做編號. 將加工好的工件(jiàn)置於20 ℃的恒溫環境中8 h 以上,按編號使(shǐ)用(yòng)三坐標測量儀測量工件R1、R2 的直徑,記錄於表格,比較有無熱誤差補償狀(zhuàng)態下的工件誤差。
實際結果如圖14 所(suǒ)示. 由圖14 可知,在有(yǒu)無熱誤(wù)差補償狀況下工件誤差首先負向變大而後向正向變化,這是由(yóu)於X 軸絲杠的安裝在X 負向有預拉伸,絲杠溫升初始時首先要消(xiāo)耗(hào)預拉伸量,因此(cǐ)導致工件誤差負向(xiàng)變(biàn)化(huà). 圖14(a)所示預拉伸(shēn)消耗之後工件誤差正向有明顯變化,跨度15 μm,這便是熱誤差造成的影響;圖14(b)所示預拉伸消耗(hào)之後工件(jiàn)誤(wù)差有了明顯改善,跨度5 μm 左右,由(yóu)此證明(míng)熱誤(wù)差補償的準確性.

圖(tú)13 加工工件
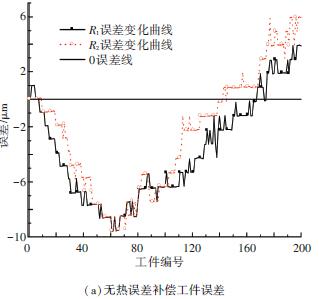
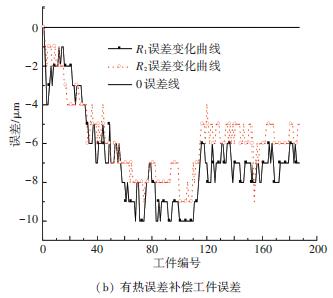
圖14 有無熱誤差補償(cháng)時的工件誤差
3、 結 論(lùn)
1)本文(wén)研究了Siemens828D 係(xì)統的熱誤差補償機製,分析了主軸與進給軸(zhóu)熱誤差(chà)之(zhī)間的相互關係,建立了綜合熱誤差模型,並考慮了工(gōng)件的(de)膨脹效應對模型的影響(xiǎng).
2)利(lì)用(yòng)PLC 與NC 之間的數據接口DB1200 實現了補償數據的通信,加工過程中監測(cè)溫度並(bìng)進行(háng)實(shí)時補償.
3)並進行了切削加工試驗,有效驗證了熱誤(wù)差的補償效果.
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資(zī)訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資(zī)訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更(gèng)多相關信息

業界視點
| 更多

行業數據
| 更多
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分地區金屬切削機床產量數據
- 2024年11月(yuè) 軸(zhóu)承出口情況
- 2024年11月 基本(běn)型(xíng)乘用車(轎(jiào)車)產量數據
- 2024年(nián)11月 新能源汽車產量數據
- 2024年(nián)11月 新能源汽車銷量情況(kuàng)
- 2024年10月 新能源(yuán)汽車產量數據
- 2024年10月 軸承出(chū)口情況
- 2024年(nián)10月 分(fèn)地區金屬切削機(jī)床產量數據
- 2024年10月 金屬切削(xuē)機(jī)床產量數(shù)據
- 2024年9月 新能源汽車(chē)銷量情(qíng)況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本型乘用(yòng)車(轎車)產量數據