


用(yòng)於電火花加工抬刀運動的速度規劃(huá)算法
2017-2-27 來源:上海交通大學(xué)機械與動(dòng)力工(gōng)程學院 作者:劉(liú)宏達,陳昊,陳默,奚學程,趙萬生
摘要(yào):電火花加工時(shí),通過采用(yòng)周期性的抬刀運動來降低放(fàng)電間隙中的蝕除物濃度,能在(zài)改進有效放電率的同時(shí)提高加工的穩定性。目前用於電火花(huā)加工抬(tái)刀運動的速度規劃算法,如常數加加速(sù)度S 形曲線速度規劃,其加加速度變化是不連續的,常數(shù)加加速度由於(yú)階躍變化會引起機床的衝擊和振動,使放電間(jiān)隙狀態變得不穩(wěn)定,從而導致(zhì)加工的(de)不穩定。提出了一(yī)種用於抬刀運動的連續加加速(sù)度的速度規劃算法,根據抬刀最大(dà)速(sù)度、抬刀高度及(jí)機床Z 軸允許的最大加加速度(dù)進行基於連續加加速度的速度(dù)規劃。通過(guò)對該速度規劃算法進行的加工比較(jiào)驗證實驗可知,運用該速度規(guī)劃方法可在保證加工效率的(de)基礎上,更好地減少對(duì)機床的衝擊和振動,使加工過程更(gèng)穩定。
關鍵(jiàn)詞:電火花加工;抬刀運(yùn)動;S 形曲線(xiàn)速度規(guī)劃;連續加加速(sù)度
電火花(huā)加工材料去除是通過在電極與工件之間(jiān)的絕緣通道中產生一係列放電完成(chéng)的,放(fàng)電產生的蝕除物不利於穩定加工[1]。為了提高有效放電率及加(jiā)工穩定性[2-4],通常采用周期性的抬(tái)刀運動將蝕(shí)除物(wù)從放電間隙中排出,同時使清潔的工作液能進入放電間隙,降低間(jiān)隙中的蝕除物濃度。
為(wéi)了減小因抬刀啟動和停止時帶來(lái)的機床衝擊, 必須對抬刀運(yùn)動中的加減速過程進行速度規劃(huá), 否則易導致過衝等影(yǐng)響放電間隙狀態的穩定(dìng),從而影響加工的穩定性[5]。目前主要采用的加(jiā)減速規劃算法有梯(tī)形速度曲線和S 形速度曲線[6],這兩種速度規(guī)劃算法都能使速度得到很好的平滑。梯形速度曲線(xiàn)是一種速度最優曲線[7],雖然算法簡單,但加速度不連(lián)續,在抬刀運動過程中加速度會產生突變,產生的(de)高頻諧波將導致機床發生較大的衝擊和振動[8-9],不適於抬刀運動速度控製。
Jahanpour 等[10]提出了一種基於指數加加速度的S 形五段速度規劃方(fāng)法,用2 個速度斜(xié)率校(xiào)正係數來控製每個(gè)尖角的加減速狀態,同(tóng)時用(yòng)基於加速度和加加速度非線性(xìng)約束(shù)的模式搜索算法,計算(suàn)每(měi)個尖角的(de)加速狀態,使總(zǒng)的加工時間最小。梁速等[11]開發了基於PMAC 運動控(kòng)製卡的五軸聯動電火花(huā)加工數控係統, 實現了主軸最高速度達12 m/min、最大加(jiā)速度約1 g 的穩定(dìng)高速抬刀性能(néng), 其加工窄(zhǎi)縫的性能顯著優於普通電火花加(jiā)工機床;但其使用的基於常數加加速度的S 形速度曲線,在高速抬刀時易帶來衝擊,導(dǎo)致過衝量大,必須增(zēng)加緩衝區來減小過衝對放電間隙的(de)影響。而基於正弦加加速度的S 形速度曲線,其速度、加(jiā)速度、加加速(sù)度都是連續的,使係統具有更高的柔度,完全避免了柔性衝擊[12]。
為了減少因常數加加速度階躍變化引起的機床衝擊和振動,本文(wén)對現(xiàn)有的用於電火花加工抬刀運動S 形曲線加減速規劃進行了改進,提出了用於(yú)電火(huǒ)花抬刀運動的連續加加速S 形曲線加減速規劃方法,並通過實際(jì)加工實驗進行了驗證。
1.基於連續加加速度的S 形速度(dù)曲線
1.1 S 形速度(dù)曲線
在數控機床伺服係統中,對(duì)運(yùn)動軌跡(jì)進行良好的速度規劃不僅能提(tí)高加工的穩(wěn)定性及加工質量,還能使插補更易實時實現。在高速切削加工中要求刀具進(jìn)給速度變化平穩,而常(cháng)規的梯形曲線加減速過程中存在(zài)加(jiā)速度不連續,因而在運動過(guò)程中易使機床及刀具產(chǎn)生衝擊和振動。基於S 形(xíng)速度曲線的加減速方法由於速度變化曲線和加速度變化曲線(xiàn)都是連續的,很大程度上避(bì)免了(le)衝擊,故在高檔數控機(jī)床上廣泛使用。文獻[13]討論了(le)S 形速度曲線的各種加減速情況,複雜情況下可分為以下7 個階(jiē)段:加加速階段、勻加速階段、減加速階段、勻速階段、加減速階段(duàn)、勻減速階段和減減速(sù)階段。在(zài)加速度充分大的情況下,可將速度規劃分(fèn)成5 段。為了簡單起見,本文用5 段式速度規劃曲線來(lái)描述[14]。
如圖1 所示,假(jiǎ)設加加速、減加速、加減速和減減速的時間都相同,設為T,初(chū)始加速度、初始速度和初始位移均為0,最大加(jiā)加速(sù)度(dù)為jmax。那麽,任何時刻的加速度a(t)、速(sù)度V(t)及位(wèi)移S(t)都能通過對加加速度的積分計算得到:
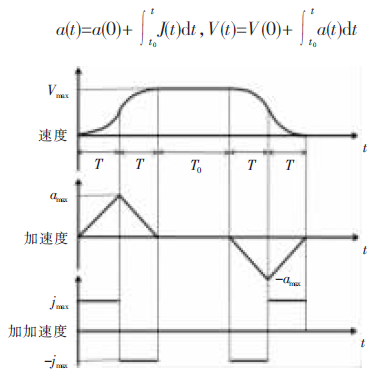
圖1 常數加加速度S 形加減速曲線
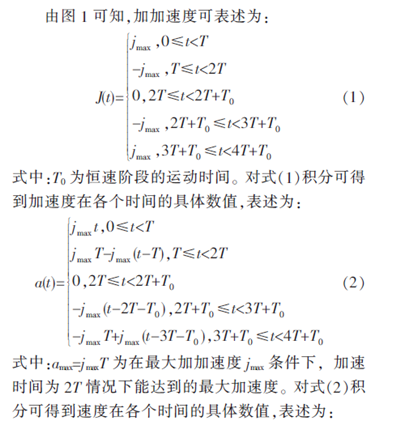
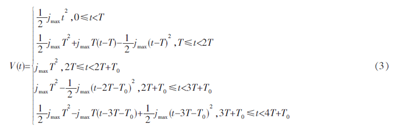
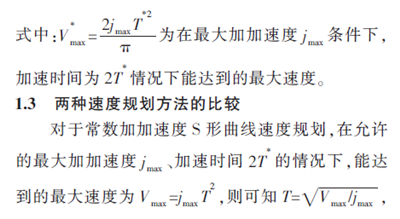
式中:Vmax=jmaxT2 為在最大(dà)加加(jiā)速度jmax條件下(xià),加速時間為2T 情況下能達到的最大速(sù)度。
1.2 基於連續加加速度的(de)S 形速(sù)度曲線
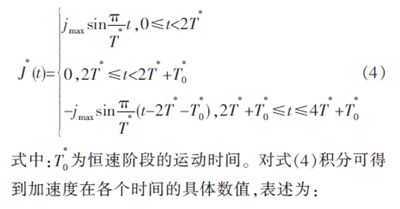
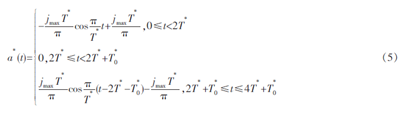
基於常數加加(jiā)速度的S 形曲線加減速在(zài)很大程度上避免了機床的衝(chōng)擊和振動,但由於(yú)加加速度為常數,使機(jī)床柔性(xìng)仍顯不足,且易在抬刀即將(jiāng)結束時產生過衝,難以穩定地保(bǎo)證幾十微米的(de)放電間隙, 需(xū)增加一個距離大於過(guò)程量的抬刀緩衝區,使過衝不影響加工區域。針對該問題,本文提出了基於連續加加速度的S 形速度曲線加減速算法。采用(yòng)正弦(xián)曲(qǔ)線加加(jiā)速度進行速度規劃,與前節提到(dào)的常數加加(jiā)速度S 形曲線一樣處理, 那麽,積(jī)分得到的加速度、速度及位移均是連續的(de)。如圖2所示,假設加加速、減加速、加減速及減減速的時間(jiān)都相(xiàng)同,設為T*,初始加速度、初始速度和初始位移均為0,最大(dà)加加速(sù)度為jmax。那(nà)麽,任何時刻的加速度a*(t)、速度V*(t)及位移S*(t)都能通過對加加速度的積分計算得到:
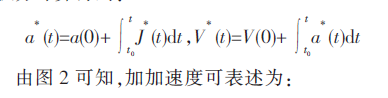
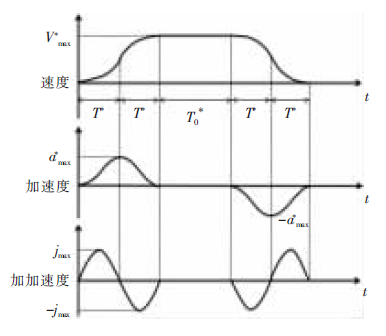
圖2 連續加加速度S 形加減(jiǎn)速曲線




2.MATLAB 仿真結果
對2 種基於不同加加速(sù)度的S 形速度曲線進行仿真,設定(dìng)機床最(zuì)大加加速度為jmax =80 000 mm/s3,最大(dà)速度為Vmax =50 mm/s,加速時間T=0.025 s,由1.3 節的推論(lùn)可確定相應的T* 。仿真結果見圖3,其中直線表示連續(xù)加加速(sù)度,虛線表示分段(duàn)常數加加速度。
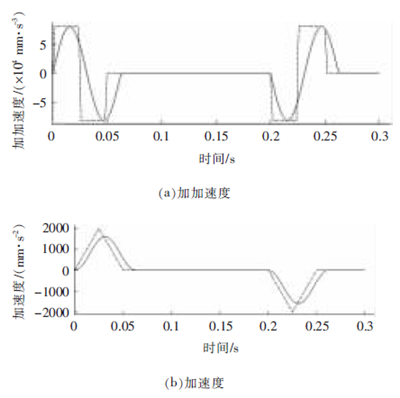
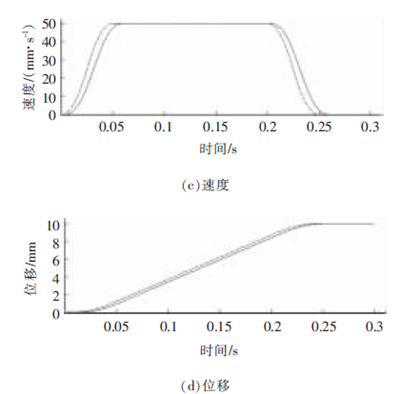
圖3 兩(liǎng)種加速方法的仿真對比
從仿真結果可看出,2 種方法在加速(sù)度、速度和位移曲線上均能(néng)保持連續且平穩的過渡。在抬刀高(gāo)度為10 mm 的(de)加減速過程中, 當速度從0 加速到Vmax=50 mm/s 時,無論是(shì)加速度、速度還是位移,常數加加速度方法的(de)快速(sù)性都要好於連續加加(jiā)速度方法,且在加速過程中,常數加加速(sù)度方法實際(jì)需要的加速度(dù)是大於連續加加速度方法的,這也造成其(qí)在回退(tuì)至抬刀起點時易產生(shēng)過衝,必須增加緩衝區來保(bǎo)證放電間隙狀態(tài)的穩定。同時,連續加加速度方法的加加(jiā)速度是連續的,在抬刀啟動和停止時能更好地減少機床的衝擊和振動, 減少絲杠(gàng)磨損,延長(zhǎng)機床使用(yòng)壽命,還能有效減少抬刀回退過程(chéng)中的過衝,保證了放電(diàn)間隙(xì)狀態的穩定,有利於(yú)加工的穩定。
3.窄槽加工實驗
本(běn)文提(tí)出的改進(jìn)型S 形曲線速度規劃方法主(zhǔ)要針(zhēn)對電火花加(jiā)工過程中的抬(tái)刀運動,而深窄槽的加工能很好地驗證抬刀性能(néng)。為了檢驗改進的抬刀(dāo)運動速度規劃算法的穩定性和可靠性,本文將其運用HE70 型電火花(huā)加工機床,並與PMAC 運動控(kòng)製卡提供的基於特征參數Ts、Ta及Vmax自行規劃S曲(qǔ)線(xiàn)加減速的插(chā)補器提供的抬刀速(sù)度規劃進行對(duì)比實驗。其(qí)中,Ts為S 曲線加減速階段所需的時間;Ta為整個加減速過程所需的時間(jiān);目標速度Vmax為經過S 曲線加速後進入勻速(sù)狀態(tài)的最大速度。
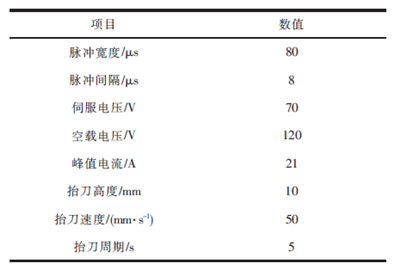
加工(gōng)實驗為Z 軸單軸加工,工件為45 鋼(gāng),電(diàn)極為70 mm×20 mm×2 mm 的石墨電極, 加工深度為10 mm,采用正極性加(jiā)工。具體實驗條件見表1。
表1 窄槽加工實驗條件
實驗發現,采用(yòng)本文方法加工一個10 mm 的(de)深窄槽平均用時約40.7 min,而采用PMAC 卡提供的(de)S 形曲線規劃方法平均用時約40.5 min。可見,本文提出的方法(fǎ)並未明顯降低加工效率,但由於(yú)連續加加速(sù)度方法的(de)加加速度是連續的(de),在抬刀啟動和停止時能(néng)更好地減少機床的衝擊和振動(dòng),最大程度地減少了對機床的柔性衝擊。加工的窄槽及(jí)微觀(guān)放大圖見圖4。
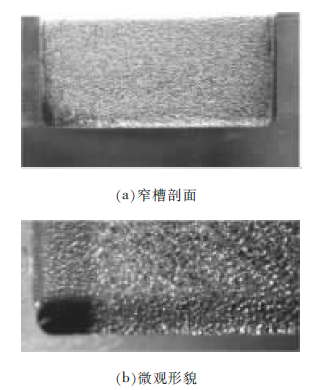
圖4 窄槽加工圖
4.結束語
針對電火花加工過程中抬刀運動S 形速度曲線加加速度不連續的問題,本文提出了一種用於抬(tái)刀(dāo)運動的連(lián)續加加速度的速度規劃算法。該方法根據抬刀高度、抬刀最大速度及機床主軸允許的最大加加速度進行基於連續加加速度的速度規劃(huá)。加速過程與減速過程的時間相同,且加加速度、加速度(dù)和速度表達式也相同。為了驗證該速度規劃算法的性能(néng),對其(qí)進行了加工比較(jiào)實驗(yàn)。結果表(biǎo)明,運用該速度規劃方法在保證加工效率的基礎上,能更好地減少對機床的衝擊和振(zhèn)動(dòng), 使(shǐ)加工過程(chéng)更穩定,且通過多次實驗驗證了該方法的穩定性與可靠性。
投稿箱:
如果您有機床行業、企業(yè)相關新聞稿(gǎo)件發表,或(huò)進行資訊合作,歡(huān)迎聯(lián)係本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業(yè)相關新聞稿(gǎo)件發表,或(huò)進行資訊合作,歡(huān)迎聯(lián)係本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息
馬")
業界視點
| 更多

行業數據
| 更多
- 2024年11月 金屬切削機床產量數據(jù)
- 2024年11月 分地區金屬切削機床產量數據
- 2024年(nián)11月 軸承出口情(qíng)況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源汽車銷(xiāo)量情況
- 2024年10月 新能源汽車產量數據(jù)
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切削機床產量數據
- 2024年10月 金屬切削機床(chuáng)產量數據
- 2024年9月(yuè) 新能源汽車銷量情(qíng)況
- 2024年8月 新能源汽車產量數據(jù)
- 2028年8月 基本型乘用車(轎(jiào)車)產量數據