


數控凸輪軸(zhóu)磨床運動(dòng)誤差分析與建模技術
2018-8-7 來源:北京工業大(dà)學機械工程與應用電子技術學院 作者:範晉偉,王鴻亮,張(zhāng)蘭清,唐宇航(háng)
摘要: 為了對(duì)某數控凸輪軸磨床(chuáng)的(de)運動誤差進(jìn)行分析(xī)和建模,分析(xī)研究了各運動(dòng)部件間運動形式和(hé)誤差類型,運用相鄰體坐標係(xì)間的運動變化來表(biǎo)達 2 相鄰體之間的運動情況,建立了相鄰(lín)體之間的理想運動方程(chéng)和有誤差情(qíng)況下的實際運動方程. 將(jiāng)相鄰體間的實際運動(dòng)方程進一步推廣到任意低(dī)序體陣列分析當中,為研究多分支數(shù)控(kòng)凸輪軸磨床誤差建模(mó)提供理論基礎. 將複雜的多分支鏈數控凸輪軸磨床抽象為簡單的多體係統,對各運動部件(jiàn)建立相應的體坐(zuò)標係和運動參考坐標係,求出相鄰體間對應的變換矩陣(zhèn). 最後,將機床運(yùn)動部件劃分為“工(gōng)件-床(chuáng)身”和(hé)“砂(shā)輪-床身”2 條運動鏈,提出了有誤(wù)差影(yǐng)響情況下實現精密加工(gōng)約束條件方程為 Pw= Pt,且(qiě)對該方程進行了求解,為數控凸輪軸磨(mó)床誤差補償的研究提供了必要條件. 結果表明: 誤差補償後的機床加工(gōng)精度顯著提(tí)高.
關(guān)鍵詞: 數控凸輪軸磨床; 誤差分析(xī); 多體係(xì)統(tǒng); 運動關係; 誤差建模
凸輪軸廣泛用於汽(qì)車、摩托車、內(nèi)燃機等發動機,主(zhǔ)要控製氣門的開(kāi)啟與閉合,其輪廓的加工精度直接影響發動機的工作性能. 數控凸輪軸磨床作(zuò)為最常用的高效、高精度凸輪軸加(jiā)工最後一道工序設備,其精度保(bǎo)持性至(zhì)關重要. 但考慮到所有機床均會麵臨工作中由於各種誤差引起的工作(zuò)精度降低(dī)問題,這就需要對機床進(jìn)行誤差分析,並采取適當措施進行誤差防止或誤差補償. 因此,減小誤差對機床加工精度的影(yǐng)響(xiǎng)方法可分為誤差防止法和誤差補償法. 誤差補償(cháng)法是在不改變原有機(jī)床的基礎上,通過建立機床誤差模型,辨識機床各項誤差並通過(guò)修正數(shù)控指令的方法來減小機床誤差對工件(jiàn)加工精度的影(yǐng)響. 誤差補償法克服了傳統誤差防止法費用(yòng)高、適用性差等缺(quē)點而得到(dào)了迅速發展(zhǎn).機床運動誤差分析與(yǔ)建模是誤差補償的基礎,對機床誤差(chà)能否正確分析是誤差建模(mó)的關鍵問題.為提高數控(kòng)凸輪軸磨床加工精度以及精度保持性,有必要對數控凸輪軸磨床的運動誤(wù)差分析與(yǔ)建模進行研究. 目前,國內外對數控機床誤差補償(cháng)技術(shù)的研究主要有: 粟時平采用多體係統理論對多軸數控機床精度建模與誤差補(bǔ)償方(fāng)法進(jìn)行了研究. 範晉偉等對提高精密凸(tū)輪磨削精度的幾何誤差補償技術進(jìn)行了研究(jiū). 李建對(duì)凸輪軸數控磨削(xuē)誤差分析和補償技術進行了(le)研究和軟件設計. 王維等采用多項式擬(nǐ)合與線性擬合方法對數控機床幾何誤差與熱誤差進行綜合建模和誤差在線實時補償. 王曉峰對複(fù)合數控機床幾何誤差補償及誤(wù)差影響溯源進行了分析. Lechniak 等提出了利用離線(xiàn)軟件進行誤差補(bǔ)償. Chnan 等對三軸磨床幾何和力的誤差補償進行了研究. ZHANG 等利用雙球杆儀對五軸數控(kòng)機床回轉工作台誤(wù)差進行了檢測和(hé)補償(cháng).
機床一般都是由多個運(yùn)動體組成的複(fù)雜機械係統,多體係統理論(lùn)是將對複雜機械(xiè)係(xì)統的(de)分析分解為對運(yùn)動體分析(xī),然後將其耦合. 數控凸輪軸(zhóu)磨床(chuáng)是特殊(shū)輪廓加工機床,隨著近年來隨動式凸輪軸磨床(chuáng)的應用越來越廣泛,以往的誤差分析(xī)和建模方(fāng)法太過於複雜,機床誤差建(jiàn)模(mó)又缺乏通用模型,不同類型的機床需建立不同的誤差模(mó)型,而多體係統理論能用於降低機床誤差建模的難度,很少有人將多體係統理論應用到該機床(chuáng)誤差建模中,因此本文采用多體係統理論對隨動式數控凸(tū)輪軸磨床進行了建模技術研究.
1、 數(shù)控凸輪軸磨床運動分析及誤差分類
對某隨動式數控凸輪軸(zhóu)磨床進行三維建模並簡化,其(qí)結構示意圖如圖 1 所(suǒ)示. 該機床是一種特(tè)殊的三軸機床(chuáng),其運動包括砂輪架沿砂輪架底座的 x向移動,工作台沿床身的 z 向移動以及主軸(zhóu)帶動工件繞 c 軸的轉動. 在工作中主(zhǔ)要是通過控製 x 軸和c 軸的聯動(dòng)來完成凸(tū)輪輪(lún)廓的加工(gōng). 通過多個運動單元組成(chéng)的(de)機床,各運動單元的誤差可分(fèn)為與位置點無關的誤差和與位置點(diǎn)有關的誤差. 與位置點無(wú)關的誤差(chà)包括: x 軸與 z 軸和 c 軸之間的垂直度誤差以及 z 軸與 c 軸之間的平行(háng)度誤差,如圖 2( a) 所示.在空間坐(zuò)標係中任意物體均有 6 個自由度,在運動過程中必然產出 6 項誤差(chà),3 項線(xiàn)位移誤差和 3 項角位移誤差,這些誤差是與位置點(diǎn)有關(guān)的誤差,三軸機床共有 18 項與位置點有關的誤差,以 x 向移動(dòng)部件為例來說明如圖 2( b) 所示,各項運(yùn)動誤差參數如表 1 所示.
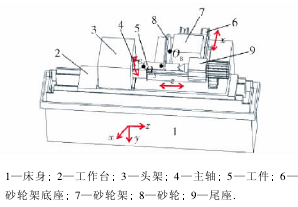
圖 1 數控凸輪(lún)軸磨床結構
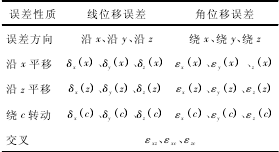
表 1 數控凸輪軸磨床(chuáng)幾何誤差參數
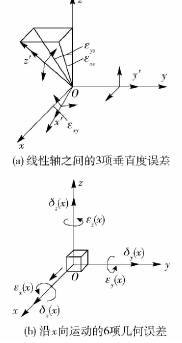
圖 2 誤差(chà)參數
2 、數控(kòng)凸輪軸磨床(chuáng)拓撲結構及低序體陣列描述
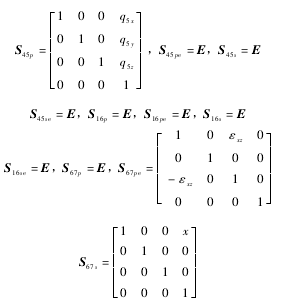
多體(tǐ)係統是指(zhǐ)由多個剛體或柔性(xìng)體通過某種形式連接而成的複雜機械係統(tǒng),多體係統運動學理論是指將機床的各個運動部件看作不同的剛體,對每個剛體分別建立體坐標係和運動坐標係,並對多體係統每個分支(zhī)按照由小到大的順序進行排列,將機床的運動變為剛體(tǐ)坐標係之間(jiān)的運動,對機床的運動分析變為多體坐標係之間的運動分析. 利用多體係統運動學理(lǐ)論對該數控機床進行拓(tuò)撲結(jié)構及低序體陣列描(miáo)述,以床(chuáng)身為分支起點(diǎn),按(àn)床身-砂輪和床身-工件分支劃分,最後(hòu)再以(yǐ)磨削點位置為終點,使機床組成閉環係統. 故該機床共有(yǒu) 2 條運動鏈(liàn),分別是由 1-6-7-8 體組成的床身-砂輪鏈( B-T) 和 1-2-3-4-5 體組成的床身- 工(gōng)件鏈(liàn)( B-W) . 該機床的拓撲結構圖如圖 3 所示. 拓(tuò)撲(pū)結構的低序體陣(zhèn)列如表2 所示.
3 、相鄰(lín)體運動關係模型的建立
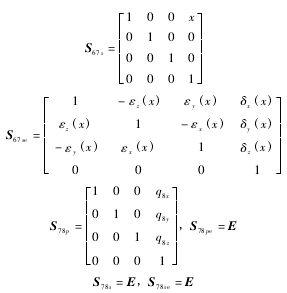
對機床各(gè)運動部件進行分解,研究相鄰體(tǐ)間的運動學關(guān)係,最後通過變換矩陣乘積耦合建立整個機床的運動模型,可以大大降低直(zhí)接研究多個運動體關係的複雜度.
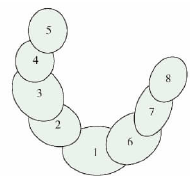
圖 3 數控凸輪軸磨床拓撲(pū)結構
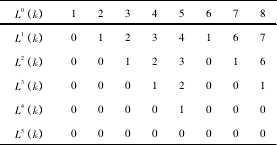
表 2 數(shù)控凸輪軸磨床拓撲結構的低序體陣列
3. 1 理想情況下相鄰體運(yùn)動關係模型的建立
圖 4 為理(lǐ)想情況下(xià)相鄰(lín)體 Bi和 Bj的相互關係,Oi和 Oj分別為兩相鄰體的體坐標係,Qj為(wéi)固定(dìng)在 Bi體上的 Bj的運動參考點,Bj相對於(yú) Bi的相(xiàng)對位置可用 Qj相對於 Oi的位置矢量 pj來表示,Bj相對於 Bi的相對移動可用 Oj相對於 Qj的位移矢量 sj來表示,R為慣性坐標(biāo)係,因此相鄰體間的運動關係可由相鄰體坐標係之間的(de)變化來表示.
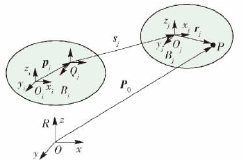
圖 4 理想情況下相鄰體相對運動
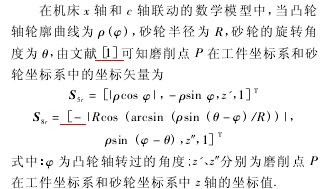
設 P 為 Bj體上任意一點(diǎn),由上述分析(xī)可知,P在 Oi-xiyizi坐(zuò)標係中的位置矢量為.
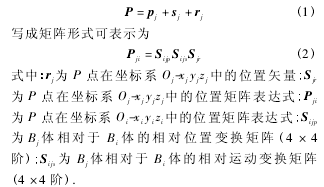
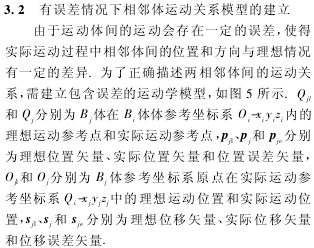
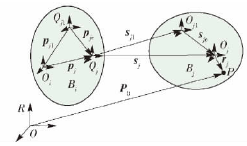
圖 5 有誤(wù)差情況下相鄰體相對運動示意圖
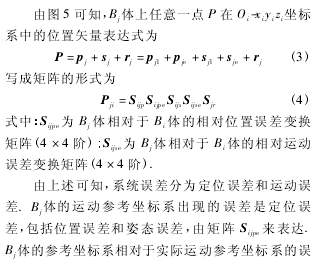
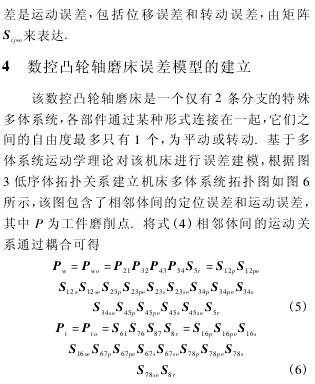
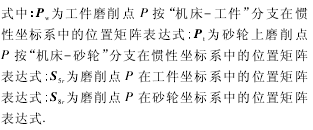
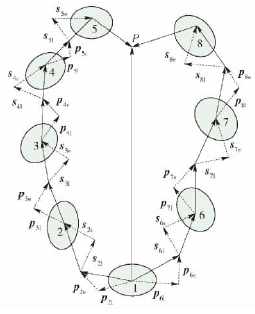
圖 6 數控(kòng)凸輪軸磨床拓撲結構
為實(shí)現(xiàn)機(jī)床精密(mì)加工,必須使砂輪磨削點在慣(guàn)性坐標係中的(de)坐標與工(gōng)件磨削點(diǎn)在慣性坐(zuò)標係中的(de)

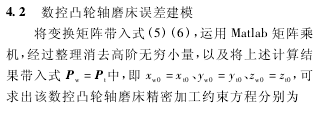

精密加(jiā)工約束方程中的 21 項誤差參數(shù)可通過雙球杆儀並配合多體係統理論進行測量和辨識,通過建立刀具路線和數控(kòng)指令(lìng)的映射關係以及數(shù)控指令和實(shí)際(jì)刀具軌跡的映射關係,利用(yòng)這 2 個關係可以對有誤差情況下的數控指令(lìng)進(jìn)行修正,並進行(háng)判別得到滿足精度要求的數控指(zhǐ)令(lìng)值,考(kǎo)慮到篇幅問題對於誤差補償過程不在敘述(shù). 該方(fāng)法已進行了實(shí)驗,利用(yòng)誤補償後的機床加工某汽車發動機進排氣凸(tū)輪軸,通過與補償前機床加工比較凸輪軸的最大(dà)升程誤差已由 22 μm 降到了 9 μm,由此可見,誤差補償後的機床加(jiā)工精度已顯著提高.
5 、結論
1) 對數控凸輪軸磨床基本(běn)結構進行了分析,各(gè)相鄰體之間的連接形式分別為剛(gāng)性連接、導軌滑動(dòng)連接和軸承連接的一種特殊的多體係統. 因(yīn)此可將數控凸輪(lún)軸磨床(chuáng)直接抽象為具有(yǒu)“工件- 床(chuáng)身”和“砂(shā)輪-床身”2 條(tiáo)運動鏈的開環多體係統,完全可以利用多體係統運動學理論對機床進行(háng)簡化分析和建模(mó),最後再以(yǐ)工件磨削(xuē)點(diǎn)和砂輪磨削點重合使係統形成閉環係統.
2) 對數控凸輪軸磨床幾何誤差進行了分析,將誤(wù)差類型分為了與位置點無關誤差和與位置(zhì)點有關誤差,分析了不同類型誤差的作用機理,提出了誤差參數的描述方法.
3) 運用多體係統誤差分析理論,對(duì)數控凸輪軸磨床建立(lì)了誤差分析模型,推導出了工件磨削點運(yùn)動約束方程的表達式,給出了實現精密(mì)加(jiā)工的必要條件,為數控凸輪軸磨床誤(wù)差(chà)補償的研究提供了必要條件.
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更(gèng)多相關信息

業界視點
| 更多

行業數據
| 更多
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分(fèn)地區金屬切削機床產量數據
- 2024年11月(yuè) 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產(chǎn)量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源(yuán)汽車(chē)銷量情況
- 2024年10月 新能源(yuán)汽車產量數據
- 2024年10月 軸承出(chū)口情況
- 2024年10月 分地區金(jīn)屬切削機床產量數據
- 2024年10月 金屬(shǔ)切削機床產量數據
- 2024年9月 新能源汽車銷量情(qíng)況(kuàng)
- 2024年8月 新能源汽車產量數據
- 2028年8月 基(jī)本型乘用車(轎車)產量數據
博文選萃(cuì)
| 更多
- 機械加工過程圖(tú)示
- 判斷一台加工中心精度的幾種辦法
- 中走絲(sī)線切割機床(chuáng)的發展趨勢
- 國產數控係統和數控機床何去何從?
- 中國的(de)技術工人(rén)都(dōu)去哪(nǎ)裏了(le)?
- 機械(xiè)老(lǎo)板做了十(shí)多年,為何還是小作坊(fāng)?
- 機械行業最新(xīn)自殺性營銷,害人害己!不倒閉才
- 製造業大逃亡
- 智能時代,少談點智造,多談點(diǎn)製造
- 現實麵前,國人沉默。製造業的騰飛,要從機床
- 一文搞懂數控車床加工刀具補償功能
- 車床鑽孔(kǒng)攻螺紋(wén)加工(gōng)方法及工裝(zhuāng)設計
- 傳統鑽(zuàn)削(xuē)與螺旋銑孔加工工(gōng)藝的區別