數控(kòng)")



基於 FANUC 數(shù)控係統的智(zhì)能製造(zào)單元設計
2022-4-26 來源: 湖南三一工業職業技術學(xué)院(yuàn) 作者:陸 雄
摘要 : 提出了將工業機器人與 FANUC 係統數控機床相結(jié)合,構成基本的智能製造(zào)單元的設想。主要分析和(hé)研究工業機器人(rén)自動上、下料的(de)工作過程(chéng),運用(yòng) FANUC 數控係統的宏程序(xù)完成上、下料程序的編製,提升數控機床的智能化水平。
關鍵詞(cí) :FANUC 數控(kòng)係統 ; 機(jī)器人 ; 智能製造 ; 程序設計(jì)
1.序言
本文選用三一(yī)汽(qì)車起重機械有限公司現(xiàn)有的一台 NBP-1000A 友嘉立式加工(gōng)中心和一台 ABB工業(yè)機器人,構造成一個基本的智能製造單元,運用工業機器(qì)人完成工件的上料、下料及搬運工作。所有控製流程,在 FANUC 數控係統通過編程來實現。
2.智能製造單元的基本組成
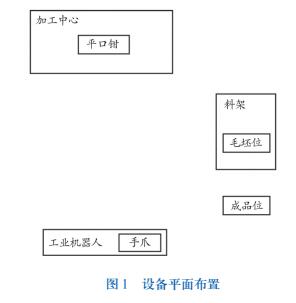
NBP-1000A 型加工中心是一台三(sān)軸控製數控機床,采用 FANUC 0iMD 數控係統,配備機械手自動換刀裝置,盤式刀庫容量為 22 把。在加工中心工作台上(shàng)配置氣動(dòng)精密(mì)平口鉗,用於工件的裝(zhuāng)夾。選用型號為 IRB2400 的 ABB 工業機器人,其承重能力 10kg。機器人側配備有工件裝夾手爪,具有夾緊、鬆開、有無料檢(jiǎn)測(cè)功能。料架上設有毛坯位和成品(pǐn)位兩(liǎng)個倉位,每個倉位設有傳感器和狀態指(zhǐ)示燈,傳感器用於檢測該位置是否有工件,狀態指示燈分別用不同的顏色指示工作狀態。設備平麵布置如圖 1 所示(shì)。
3.程序設計
整個加工過程是由數控係統通過編寫程序來實現(xiàn)的。自動(dòng)上、下(xià)料的(de)全過程是由加(jiā)工中心與機器人之間通過上、下料宏程序相互配(pèi)合來完成的。上、下料動作(zuò),毛坯及成品的搬運都由機器人完成。平口鉗、機床(chuáng)門及機器人手爪動作都是由數控係(xì)統(tǒng) PMC 程序控製。平口鉗的裝料位置由加工中心 X、Y 軸(zhóu),通過數控(kòng)係統與數控機床PMC 的 G 代碼實(shí)現信息交(jiāo)換。
3.1 工作流程
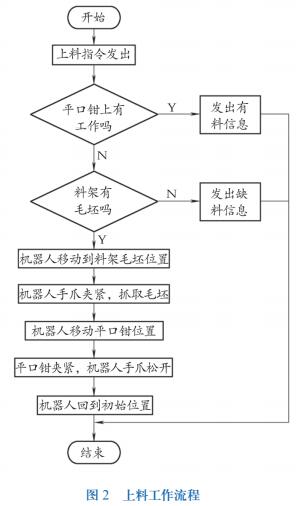
程序設計之前,首先要將(jiāng)各部件的工作流程弄清楚,才能設計出完好的程序。上料是由工業機(jī)器人從料架的毛坯位(wèi)置(zhì)搬運毛坯到數控機床中,加(jiā)工前將毛坯裝到平口鉗中。加工完成後,將成品從平口鉗上卸下(xià),送至料架成品位置。上料工作流程如圖(tú) 2 所示。
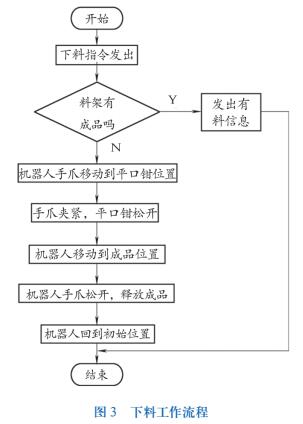
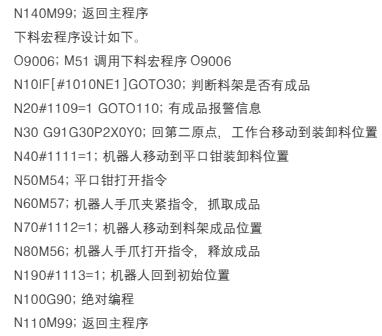
下料是由工業機器人將加工好的(de)成品從數控機床上搬運到料(liào)架成品(pǐn)位置,下料工作流程如圖3 所示。
3.2 上、下料宏程序的編寫
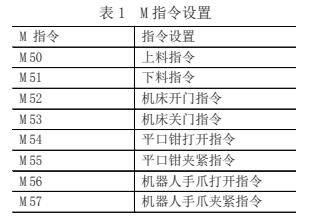
(1)M 代碼定義上、下料各環節(jiē)的控製采用輔助(zhù)功(gōng)能 M 指令來實現,M50、M51 通過宏程序來完成,M52~M57 各(gè)指令需(xū)要在數控係統中編寫相應的 PMC 程序,M 指令(lìng)設置見表(biǎo) 1。
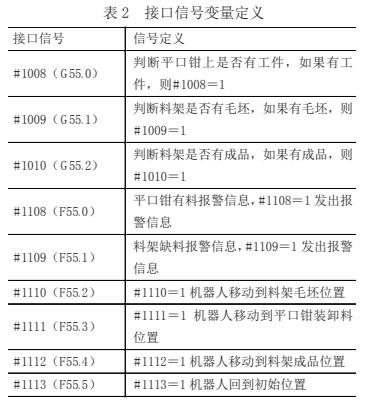
(2)接口信號變量定義上、下料宏程序采用了接口(kǒu)信號變量(liàng),定義見表 2。接(jiē)口輸入信(xìn)號變量在(zài)宏程序(xù)中 “讀取” 係統輸入(rù)信號的狀態,從而在程序中直接獲得相應的(de)檢測信號,#1008~#1010 為接口輸入信號變(biàn)量。接口輸出(chū)信號變量在宏程序中 “改變” 係統輸出信號狀 態,#1108~#1109 為(wéi) 報(bào) 警 輸 出 信 號 變 量,#1110~#1113 輸出信號變(biàn)量控製數控機床(chuáng)的執行(háng)元件向機器人(rén)發出工作(zuò)指令。
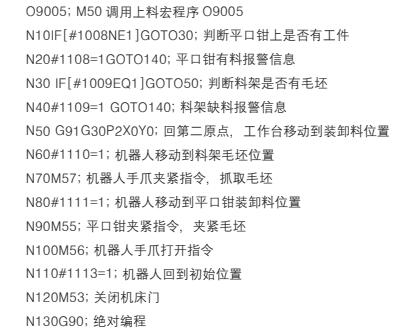
(3)係統參數設定 要通過 M50、M51 指令在數控程序中調用宏程序,必須對相關參數(shù)進(jìn)行設定。設定 P1195=1,使用 M 代碼調用宏程序 ;設定 P6075=50,使用 M50 調用(yòng) O9005 宏程序 ; 設定 P6076=51,使用 M51 調用 O9006 宏程序。上料宏程序(xù)設計如下。
4. 結束語
通過(guò)對智能製造單元工(gōng)業機器人自動上、下料工作過程的分析和研究,運用 FANUC 數控係統編寫上、下料(liào)程序,不僅提升了數控機(jī)床的智能化水平,滿足了(le)生產車間(jiān)智能化製(zhì)造的需求,而且(qiě)減少了工人的勞動強度,提高了生(shēng)產效率。通過進一步研究,可以考慮將一台工業機器人與多(duō)台數控機床配合,實現自動上、下料功能,提高工業機器人的利用率,更大範(fàn)圍地提升工廠的智能化生產水(shuǐ)平。
投稿箱:
如果您有機床(chuáng)行業(yè)、企業相關新聞稿件發表,或(huò)進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床(chuáng)行業(yè)、企業相關新聞稿件發表,或(huò)進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業界視點
| 更多

行業數據
| 更多
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分地區金屬切削機床產(chǎn)量數據
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源(yuán)汽車銷量情況
- 2024年10月 新能源汽車產量數(shù)據
- 2024年10月 軸(zhóu)承出口情況
- 2024年10月 分地區金屬切削(xuē)機床產量(liàng)數(shù)據
- 2024年10月 金屬切削(xuē)機床產量(liàng)數據(jù)
- 2024年9月 新能源汽車銷量情(qíng)況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本型乘用車(轎車)產量數據