



基於androids的五軸聯動數控係統設計
2020-5-22 來源:溫州職業技術學院機械工程係 作(zuò)者:張亮
摘(zhāi)要: 以androids嵌入式平台作為(wéi)硬件平台(tái)、STM32F407作為運動控製芯(xīn)片,開發(fā)一種五軸聯動數控係統,可實現遠(yuǎn)程控製、自動加工、手動加工,加工中(zhōng)刀具轉速可調、暫停、繼(jì)續,以及沿原(yuán)軌跡返回及支持G代碼等功能。測試結果表明,該係統可(kě)有效實現五軸數(shù)控機床高效、高精(jīng)度的聯動(dòng)加工,且達到預期精度0.005mm,具有應(yīng)用可行性與工程價值,可(kě)為多軸聯動數控機床的開發提供參考。
關鍵詞: 五(wǔ)軸聯動;數控係統;androids;雕刻機
0 引 言
數控技術在醫療(liáo)器械、軍事工業、航空航天等諸多領域已凸顯優越的性能。五軸聯(lián)動數控技術是數控技術的核心,具有高速、高精度、環(huán)保、智能、複合化等優點(diǎn)。相較於國外,國內數控係統及產品的研究水平還較低,現階段國內使用的高端五軸數控機床大多依賴於(yú)進口,價格相當昂貴[1-3]。
目前,國內工業機床(chuáng)的控製主(zhǔ)要還是(shì)基於特(tè)定的工業PC 機,功能比較有限,且係統更新升(shēng)級(jí)較(jiào)慢,無法滿足製造生產中日益變(biàn)化(huà)的控(kòng)製需求。因此,將androids智能設(shè)備作為移動(dòng)控製終端應用於數控(kòng)控製領(lǐng)域,實現低成本、高精度、穩定、智能化控製是時代發展的潮流[4]。本文以androids嵌入式平台作為硬件平(píng)台、STM32F407作為運(yùn)動控製芯片[5],開發一種五軸聯動數控係統。androids係統具有豐(fēng)富的功能接口,基於androids的五軸聯(lián)動數控係統減少了硬件設計,降低了成本,且可遠程控製(zhì),提高控製係(xì)統的靈活度。同時,為驗證係統的可行性,設計一台五軸微型數(shù)控雕刻機作為測試平台,通過實際加工具有複雜表麵結構的零件,檢驗係統(tǒng)的性能、應用可(kě)行性及工程價值(zhí)。
1、係(xì)統整體(tǐ)設計方案
目前,常見的數控係統(tǒng)主要為基於PC的開放(fàng)式數控係統和基於微處理器的嵌入式數控係統。本文設計的數控係統采用“嵌入式平(píng)台+可編(biān)程運動控製芯片”串聯式閉環控製結構,以androids嵌入式(shì)平台作為硬件平台、STM32F407作為運動控製芯片,具有硬件(jiàn)選擇性強、功能可(kě)靠穩定、遠程便捷控製(zhì)、成本較低等優點(diǎn)。
1.1 係統總體(tǐ)結構
根據五軸聯動數控係統功能要(yào)求[6],為了使係統(tǒng)在(zài)結構設計和功能(néng)實現上更加緊湊(còu)靈活,將係統整體劃分為上位機(中(zhōng)央控製係統)和下位機(運動控製係統)兩部(bù)分。基於C/S架構模式,上位機androids終(zhōng)端和下位(wèi)機采用全雙工高速通訊,工作(zuò)時上位機發送運動命(mìng)令;下位機接(jiē)受(shòu)命令,並經過代碼編譯、脈衝發送(sòng)、輸入輸出信號等處理(lǐ)後發出(chū)對應的脈衝數據給伺服電機,並將傳感器接收到的機床工作(zuò)狀態及運動參數反饋給上(shàng)位機模塊。係統總體結構如(rú)圖1所示(shì)。
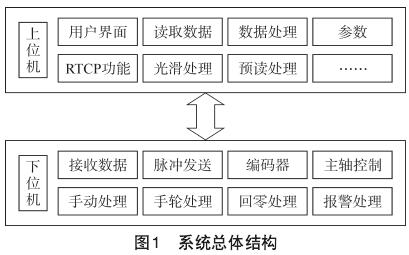
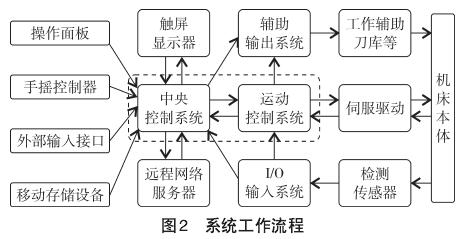
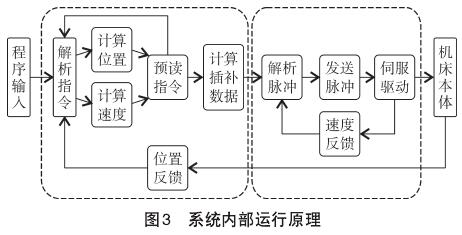
上位機主要承擔操作麵板、手搖控(kòng)製器、外部(bù)輸入接口、移動存儲設備、觸屏信息、遠程網絡通訊等人機交互功能 ;下位機(jī)主要(yào)承擔插(chā)補、進給伺服、代碼(mǎ)編譯、誤差補償等強實時性任務(wù),以及電主軸控製(zhì)、機(jī)床開關(guān)量的控製、反饋信號的(de)處理等底層硬(yìng)件控製功能,對接(jiē)收到的(de)信號進行分析處理,發出脈(mò)衝指令(lìng)給伺服驅(qū)動器,由伺服驅動器驅動伺服電機,實(shí)現機床本體的運動控製。伺服驅動器檢測到的伺服(fú)電機電壓電流、負載情況、報警信息反饋給運動控製係統,以監控伺服驅動器工作(zuò)情況。運動控製係統配合中央(yāng)控製(zhì)係統共同對輔助(zhù)輸出 係統如刀庫、切削液、潤滑係(xì)統、排屑係統等進行控製。檢測傳感器如編碼器采集(jí)機床位置數據反饋給I/O 輸入係統,再由I/O 輸入係統分別反饋給中央(yāng)控製係統和運動(dòng)控製係統進行位置與速度等補償(cháng),實時(shí)進行誤差跟隨補償,以(yǐ)確(què)保加(jiā)工精度實現全閉環控製。係統工作流程及(jí)其內部運行原理如圖2~圖3所示。
1.2 係統功能要求
係統功能有(yǒu)以下要求:以UG三維軟件建立三維(wéi)模型並經UG自建後處理軟件,生成刀具加工G代碼程序,係(xì)統上(shàng)位機讀取數據(jù)並對其進行處理和插補修改,形成適合運動控製卡的加工信息。由操作界麵(miàn)將加工信(xìn)息通過(guò)網絡通訊發送給下位機,下位機將進行插補計算並加工信息,發送伺服電機驅動器和變頻器。伺服電機驅動器(qì)發出電子脈衝給控製直線運動和旋轉(zhuǎn)運動的伺服電機,控製旋轉速度,變頻器發出電(diàn)子脈衝給電主軸控製刀具運轉速度,從而完成機床(chuáng)的走(zǒu)位(wèi)和(hé)加工。此時(shí),位移傳感器反饋各個軸運動位置信息給上下位機,實現全(quán)閉環控製。通過操作界麵上的(de)相應按(àn)鈕輸入對(duì)工作流程的控製信息(如加工開始、結束、暫停、自動加工、手動加工、回零(líng)處理等),通過上位(wèi)機和(hé)下位機的相互信息協同完成零(líng)件加工和實時監控。
2 、係(xì)統硬件設計
上位機硬件係統主要包括主控芯片(Exynos4412 64位芯(xīn)片)、高清(qīng)觸(chù)屏、通訊(xùn)模塊、控製係統異常報警電路和(hé)GPIO按鍵(jiàn)模塊等。除常(cháng)規性的基礎電路外,下(xià)位機硬件係(xì)統主要包括基STM32F407 的芯片電路、伺服驅動電路、電主軸變頻控製電路(lù)、手輪控製電路、繼電器控製電路及信號反饋電路等,最為關鍵的是伺服驅動脈衝定位電路和電主軸DC0-10V模擬量控製電路。
2.1 脈衝回路硬件電路
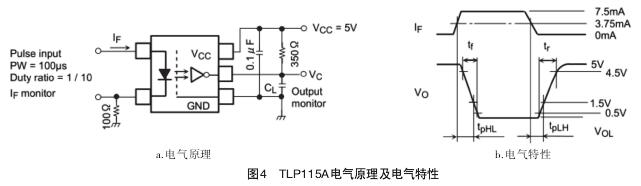
采用STM32F407芯片,額定電壓(yā)為(wéi)3.3V,一般伺服驅動器所能識別的脈衝電壓為(wéi)5V左右,綜合考慮穩定性、可靠(kào)性和響應速度,選擇東(dōng)芝公司(sī)生產的TLP115A型5 引腳高速光耦作為脈衝隔離輸出光耦。TLP115A電氣原理及電氣特性如圖4所示。
2.2 電主軸變頻控製模塊
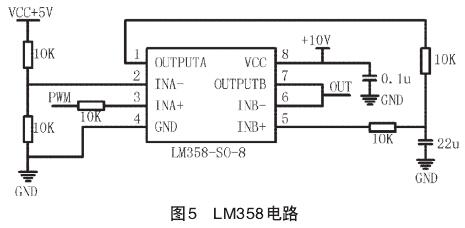
為了提高(gāo)加工零件的表麵精度,主軸係統采用電主(zhǔ)軸控製單元,主要組(zǔ)成部分為變頻器(qì)和主軸電機。采用PWM占空比方式輸出DC0-10V模擬(nǐ)量控製電主(zhǔ)軸轉(zhuǎn)速。STM32F407 芯片中(zhōng)PF8 引腳作為PWM信號(hào)輸出引腳,設置占空比方式,將PF8 引腳采(cǎi)用(yòng)TLP115A高(gāo)速光耦芯片隔離輸出,將(jiāng)PWM波(bō)由3.3V轉換成5V,再采用(yòng)LM358P作為模擬量輸出主芯片,將PWM波轉換成DC0-10V模擬量電壓。其具體硬件(LM358)電路如圖5所示。
3 、係統軟件設計
係統軟(ruǎn)件模塊主要用於管理(lǐ)加工程序,實現對機床各個軸電機的運動控製。係統上位機基於androids 係統,編程語言(yán)為JAVA;下位機開發工具為Keil5,編程語言(yán)為C語言,調用STM32F407運動控製卡提供的庫函數,實現各個軸的(de)運動控製。係統軟件模塊(kuài)主要包括人機交互(hù)模塊、編譯模塊、運動控製模塊等。
3.1 上位機(jī)程序(xù)設計
上位機程序主要為人機交互模塊,其功能是顯示人機交互界麵信息和關鍵參數設置。係統人機交互(hù)主界麵(見圖6)通過一個Activity類(lèi)加以實現,每一個按(àn)鈕、顯示框(kuàng)、編(biān)輯框都在該類中聲明、定(dìng)義、使用消(xiāo)息機製加以實現。該界(jiè)麵主要包括程(chéng)序段顯示區、坐標位置顯示區、進給倍率調(diào)節區、3D圖形顯示(shì)區、功能按鍵區。
3.2 下位機程序設計
下位機主要為編譯模塊和運動控製模塊,包括伺(sì)服(fú)驅動控製、插補計算、速度控製、GPIO 控製、編碼(mǎ)器反饋等(děng)。係統發送各個軸(zhóu)脈(mò)衝序列,實現伺(sì)服電機的驅動控製,控製脈衝之(zhī)間的時間間隔等效於控製伺服(fú)電機的轉動速度。為了保證平穩、快(kuài)速輸出脈衝(chōng)數據,在下位機專門安放一個高速定時器,負責脈衝計算與脈衝輸出。采用全(quán)閉環速度模式PID數據采樣插補法,將插補曲線拆(chāi)分為若幹個細(xì)小直線段進行插補(bǔ)。在插補過程中,采集當前刀具位置、計算當(dāng)前(qián)點矢量、計算插補(bǔ)誤差量(liàng)、綜合矢量與速度等參數,保證各個軸加減速的平(píng)滑穩定性,避免(miǎn)加(jiā)速度的衝擊(jī) ;在兩個(gè)軌跡點之間插入密集化點,刀具按軌跡點插(chā)值路徑運行。

4、測 試
為了驗證係統的可行性,設計一台五軸微(wēi)型數控雕刻機作為測(cè)試平台。數控雕刻機是一種采用數控技術的專用機床[7]。根據雕刻(kè)機功能(néng)要求,采用Altium Designer Summer09軟(ruǎn)件設計PCB圖並製作控製電路板(見圖7),搭建(jiàn)線路完成一個(gè)零件(jiàn)的雕刻加工。經UGCAM編程得到實際加工刀具(jù)路徑的G代碼文件,利用雕刻機和係統進行實際加工。五軸微(wēi)型數控雕(diāo)刻機樣機如圖8所示。從(cóng)加工結果(guǒ)可知,係統可有效實現五軸數控機床高效、高精度的聯動加工,且可達到預期精度0.005mm。

5 、 結 論(lùn)
本(běn)文提出一種以(yǐ)“androids係統+STM32F407運動控製芯片”為係統控製核心(xīn),可遠程控製的五軸(zhóu)聯動數控係統。該係統采用(yòng)模塊化設(shè)計,具有(yǒu)豐富友好的人機界(jiè)麵和優良的開放性能,支持多種(zhǒng)操作平台,有(yǒu)較強的可移植性,維修更簡易,質量更可靠,增強了開放式數控係統的市(shì)場競爭力。該係統創新(xīn)點體現在以(yǐ)下幾個方麵 :一是模塊化設計。係統各模塊相互獨立,可讓用戶在較大範圍內根據要(yào)求配(pèi)置係統,如機(jī)床軸數、I/O點數等,而當(dāng)係統硬件改變時,隻需簡單修改數控係統(tǒng)軟件,即可滿足(zú)要求,具有更大的靈活性,更能適應市場的動(dòng)態(tài)變化。二是具有豐富友好的人機界麵。
用戶可在係統環境下使用不同的編程語言隨(suí)心(xīn)所欲地開發適合個人用途的(de)人機界麵(miàn),如某些特殊機床的專屬控製功能,而不必(bì)過多地考慮係統控製器(qì)的核心(xīn)部分。三是具有(yǒu)優良的(de)開放性能。係統能方便地掛上第三方應用軟件,如各種CAD/CAM軟(ruǎn)件、測試軟件或管理軟件,以滿足用戶所需,開放式係統可(kě)集眾家之長。四是支持多種操作(zuò)平台。係統結構(gòu)更好地支持windows, androids, win CE,Linux, Unix, RTOS等不同操作平台。測試結(jié)果表明,該係統可有效實現五軸數控機床(chuáng)高效、高精度的聯動加工,且可達到預期精度0.005mm,具有應用可行性與工程價值。
投稿箱:
如(rú)果您有機床(chuáng)行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如(rú)果您有機床(chuáng)行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信(xìn)息

業界視點
| 更多
")
行業數據
| 更多
- 2024年11月 金屬切削機床(chuáng)產量數據(jù)
- 2024年11月 分地(dì)區金屬切削機床產量數據
- 2024年11月 軸(zhóu)承出口情況
- 2024年11月 基本型乘用車(chē)(轎車)產量數據
- 2024年11月(yuè) 新能源(yuán)汽車產量數據
- 2024年11月 新能源(yuán)汽車銷量(liàng)情(qíng)況
- 2024年10月 新能源汽車產量數據
- 2024年(nián)10月 軸承出口情(qíng)況
- 2024年(nián)10月 分地區金屬切削機床產(chǎn)量數據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年(nián)8月 新能源汽車產量數據(jù)
- 2028年8月 基本型乘用車(轎車)產量數據
博文選萃
| 更多
- 機械加工過程圖(tú)示
- 判(pàn)斷一台加工中心精(jīng)度的幾種辦法
- 中(zhōng)走絲線切割機床的發展趨勢
- 國產數控(kòng)係統和數控機床何(hé)去何從?
- 中國的技術工人都去哪裏了?
- 機械老板做了十多年,為何還(hái)是小(xiǎo)作坊?
- 機械行(háng)業最新自殺性營銷,害人害己!不倒閉才
- 製造(zào)業大逃亡
- 智(zhì)能時代,少談點智造,多談點製造
- 現實麵前,國人沉默。製造業的騰飛,要從機床(chuáng)
- 一文搞懂數控車床加工(gōng)刀具補償功能
- 車床(chuáng)鑽(zuàn)孔攻螺紋加工方法及工裝設計(jì)
- 傳統鑽削與螺旋銑(xǐ)孔加工工藝(yì)的區別