



西門子840D精度調(diào)整與補償應用
2018-5-10 來源:中航飛機股份有限公司西安飛(fēi)機分公司(sī)設備(bèi)5 作者:譚樂誌
摘要:本(běn)文介紹了西門子840D數控係統常見精(jīng)度調整與補償的方法及其在數控機床(chuáng)維修實踐中的應用。
1. 換向角(jiǎo)調整
(1)換(huàn)向角。數控機床更換同步電動機後,電動機磁場的零點和編碼器的零點(diǎn)常常不一致(zhì),兩者相差一定的角度,導致電動機運行不平穩,嚴(yán)重時甚至無法啟動。西門子840D數控(kòng)係統提供了同步電動機的換向角(又稱同步角、整流角)的調整功能,可以通過相關坐標軸電動機驅動參數來調整(zhěng)換向角(jiǎo)使(shǐ)兩者一致。
(2)應用實例。某五(wǔ)坐標加工中(zhōng)心更(gèng)換A軸同步電動機後,電動機功率增大,需要調整換向角,方法如下:①將(jiāng)A軸的驅動參數P1011.12設為1,然後執行N C-R E S E T,進行係統重啟。②係統重(chóng)啟完成後將參數P1017設定為(wéi)1,然後加(jiā)坐標軸使(shǐ)能,在J O G方式下點動一下A軸,使A軸運動,A軸同步電動機開始(shǐ)自適應,自適應完成後840D數(shù)控係統自動調整好換向角,並自動記錄到參數P1016裏,同(tóng)時參數P1017自動變成0(該步驟完成後係統會出現(xiàn)300799號報(bào)警,忽略該報警即可)。③保存驅動參數並執行NC-RESET進行(háng)係統重啟,重啟完成後修改的驅動參數才生效,換向角調(diào)整(zhěng)完(wán)成。注意一般要執行換向角調整操作兩次,兩次自動調整(zhěng)的換向角結果(參數P1016 中的數值)變化範圍不超過5°為合格。
2. 零點偏置調整
( 1 ) 零 點(diǎn) 偏 置 。 西 門 子8 4 0 D 數控(kòng)係統中的參考(kǎo)點偏移量參數是M D34090,可以在裏麵人為(wéi)設定機床原點(diǎn)的偏(piān)移量(liàng)。當機床實際的坐標位置與所想要的坐標位置有偏差時,可以在此參數裏進(jìn)行補償,設置MD34090(新)=MD34090(舊)+實際的坐標位置與理想的坐(zuò)標位置的偏差。注意,MD34090參數(shù)更改後(hòu)需要(yào)係統斷電(diàn)重(chóng)啟、機床軸回零後才能生效(xiào)。
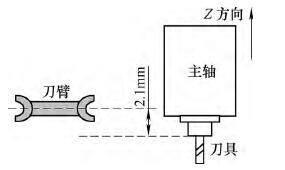
(2)應用實例。某(mǒu)加工(gōng)中心,Z軸光柵尺故障,更換完光柵(shān)尺後,刀庫自動換(huàn)刀時發出響聲,發生撞刀故障。原因是更換了Z軸光柵尺,Z軸零點位置和以前(qián)有偏(piān)差,致使換刀時刀臂中心線與主(zhǔ)軸裝刀孔中心線不在同一水平麵上,導致撞(zhuàng)刀現象發生。維(wéi)修時首先用百分表檢(jiǎn)測出刀(dāo)臂中心線與主軸裝刀孔中心(xīn)線(xiàn)相差(chà)2.1mm,如圖1所示。將Z軸零點偏(piān)置參數MD34090由原來的(de)0改成2.1後,故障修複。
3. 同步軸調整
(1)同(tóng)步軸。龍門移動式機床(chuáng)的龍門驅動屬於雙軸(zhóu)驅動,例如定義龍門移動為X軸,實際上X軸(zhóu)是由X1和X2兩個軸構成的,一個是主動軸,一(yī)個是同步軸(也叫 從 動 軸 ) 。 對 X 軸 的 運 動 指令、編程指令是針對主動軸的,同(tóng)步軸跟隨主(zhǔ)動(dòng)軸同步運動。西 門 子 8 4 0 D 數 控 係 統(tǒng) 中M D 3 7 1 0 0 龍門同步軸開關的設置(以X軸為例)為(wéi):設定X1的M D37100=1(龍門同步(bù)組1的主動軸),即定義X1軸為主動軸;設(shè)定X2的MD37100=11(龍門同(tóng)步組1的同步軸),即定義X2軸為(wéi)同步軸。
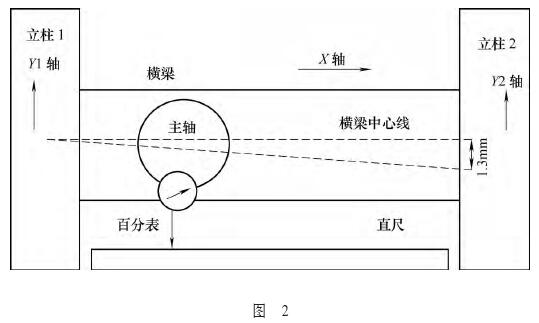
(2)應用實例。某數控鏜銑床,JOG方式(shì)下X軸(zhóu)可以運(yùn)動,但是橫梁(即Y軸)移動就出現報警,報(bào)警內容為龍門超差。分析原因是橫梁扭曲超出極限值,即橫梁中心線不水平了,龍門軸扭了,也就是龍門(mén)橫梁(liáng)Y軸(zhóu)的主動軸Y1和(hé)同步軸Y2不同步了,兩者之間距離太大而超出允差帶。維修時需要重新調整Y1和Y2的相對位(wèi)置使兩者平衡,首先用百分表測量橫梁扭曲程度,百分表(biǎo)固定在主軸上(shàng),表針壓在直尺上,在X軸負(fù)向端點將百分表置零,JOG方式下移動X軸向正向(xiàng)運動(dòng),測出X軸正(zhèng)向端點百分表讀數值1.3mm,說明Y1軸和Y2軸相差1.3mm,即橫梁(liáng)中心線偏差1.3mm,如圖2所示。
維修時首(shǒu)先將Y1和Y2的MD37100都改成0,將Y1和Y2的同步關係取消,使Y1和Y2成為兩(liǎng)個單獨的坐標軸。JOG方式下(xià)將Y2在原位(wèi)置基礎上開動1.3mm,使得橫梁中心線水平。因為Y2開動(dòng)了1.3mm,所以需要修(xiū)改Y2的零點偏(piān)置MD34090參數,將MD34090裏的數值改成:新值=舊(jiù)值+1.3。將Y1和Y2的M D37100改回原值,恢複兩者之(zhī)間的主動軸、同步軸關係。最後斷電重啟坐標回零後,橫梁運(yùn)動平穩(wěn),橫梁扭曲故障排除。
4. 反向間隙補償
(1)反向間(jiān)隙。由於(yú)螺母結構本(běn)身(shēn)的間隙及(jí)其受(shòu)軸(zhóu)向載荷後的彈性變形,滾動絲杠螺母機構存在軸向間(jiān)隙,該軸向間隙在絲杠反向轉動時表現為絲杠轉動一定角度,而螺母未移動,形成了(le)反向間隙。
(2)應用實例(lì)。某三坐標數控銑床,機床在加(jiā)工(gōng)零件(jiàn)時(shí)出現X、Y坐標尺(chǐ)寸正常,但是Z向誤差過大,造成零件超差。測量機床Z軸(zhóu)的反向間隙,在手脈(手搖脈衝發生器)進給方式下移動機床,利用(yòng)百分表測量指令值與(yǔ)實(shí)際(jì)運動距離是(shì)否(fǒu)一致(zhì),發現當Z軸首次反向運動時,實際運動距離比正常指令值少0.09mm左右,說明存在反向間隙,該反向間隙在數(shù)控係統的補償範圍(wéi)內,將機床參數MD32450由原來的0.05改成0.14後,Z向加工尺寸超差問題解決。
5. 刀具矢(shǐ)量補償
(1)刀具矢量。在(zài)五坐標運行過程中,對於刀具在空間的定位是(shì)靠矢量的組合來處(chù)理的。在維修實(shí)踐中,可以利用840D數(shù)控係統的矢量補償功能來彌補因旋(xuán)轉坐標回轉精度不好而造成的加工精(jīng)度差的問題。在(zài)840D數控(kòng)係統中由機床參數“MD24550 $MC_TRAFO5_BA S E_TO O L_N”來(lái)具體完成該(gāi)補償功能,該參數有3個分(fèn)量,分別對(duì)應刀具底部到旋轉中心的矢量在(zài)X、Y和Z坐標3個方向的分矢量。
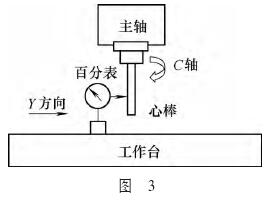
(2)應用實例。某五坐標數控機床在進(jìn)行三坐標(biāo)加工(gōng)時正(zhèng)常,在五坐標加(jiā)工時零件尺寸超差。需要對C軸的(de)回轉精(jīng)度進行檢查:A、C軸回零,然後加上(shàng)五坐標指令,將百分表打在Y方向(xiàng)心棒的母線上,旋轉C軸一周,百分表檢測的最大偏移值為±0.10mm,如圖3所示。說明C軸的回轉中心和主軸的回轉中心(xīn)不重合,C坐標的精(jīng)度超差從而造成了零件外型尺寸超差。在參數MD24550中進行補償(Y軸方向),補償(cháng)值為0.05mm。補償後進行檢驗的結果表明,精度滿足實際(jì)加工要求。
6. 結語(yǔ)
熟練運用數控係統的各種精度(dù)調整(zhěng)和(hé)補償,可以有效改善數控(kòng)機(jī)床定位精度和加工精度,快速修複因加工零件尺寸超差等原(yuán)因造成的機床精度(dù)故障。
投稿箱:
如果您有機床行業、企業相(xiàng)關新聞稿件發表(biǎo),或進行資訊合作,歡迎(yíng)聯(lián)係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相(xiàng)關新聞稿件發表(biǎo),或進行資訊合作,歡迎(yíng)聯(lián)係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息
州金馬")
牌調查")