")



基於嵌入(rù)式的齒輪加工數控係統的研究
2018-4-17 來源: 河南機電高等專科學校 作者:王鵬飛, 賈琛
摘要: 為了提高齒輪的加工(gōng)精度,提出了一種基於嵌入式係統的齒輪加工(gōng)數控係統.構建了係統的總體框架,並對係統進行了任務劃分,設計了多(duō)個功能模塊;通過確定滾齒對刀點,分(fèn)析滾刀加(jiā)工(gōng)運動軌跡、滾刀和(hé)工件的運動關係,計算關鍵點(diǎn)的坐標值,構建出滾齒加(jiā)工自(zì)動編程的數學模型,在本係統的(de)硬件平(píng)台上,開發(fā)實現了滾齒(chǐ)加工自動編程功能模(mó)塊。 為今後齒輪數控加(jiā)工控製精度的提高奠(diàn)定了一定的基礎。
關鍵(jiàn)詞: 嵌入(rù)式; 齒(chǐ)輪加工; 數控係統; 自動編程
1、齒輪加工數控係統的總(zǒng)體設計
(1)嵌入(rù)式齒輪加(jiā)工數控係統的硬件設計由於 windows ces 操作係統簡單、具(jù)有係統的開發(fā)工具、良好的穩定性等優點,本(běn)數控係統選擇在Win CE6.0 的操作平台上開發研究,係統由(yóu) ARM、DSP、FPGA 構成。其中 EP9315(ARM)微處理器(qì)負(fù)責完成數控係統的人機交互模塊,比如加工參數的存儲(chǔ)、輸入和顯示功(gōng)能;另外還負責通過網絡(luò)通(tōng)信模塊將工作信息傳送至遠程服務器。DSP6713 負(fù)責處理數控係統的 複(fù)雜運動算法 ,比如(rú),插補處理和伺服位置(zhì)控製。 把人機(jī)交互(hù)模塊和運動控(kòng)製模塊單獨管(guǎn)理,一方(fāng)麵使軟件開發更具模塊性和靈活性,另外還(hái)有助於得到更好的控製性能、加工精度和較快的處理速度。FPGA 采用並行總線的方 式完成(chéng)機床側 I/O 信息的傳輸和接收。
(2)嵌入式齒輪加工數控係統的軟件設計考慮到係統的可擴展性和可移植(zhí)性,也考慮到模塊間繁瑣的數據交換、程序的運行效率以及開發難度,結合齒輪數控加工(gōng)的特點,本係統軟件(jiàn)功能劃分為三大模(mó)塊,分別是 ARM 界麵管理模塊、DSP 數值運算模(mó)塊和機床 I/O 模塊。
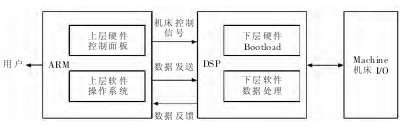
圖1 數控係統總體結構框圖
2、齒輪加工數(shù)控係統(tǒng)設計
齒輪加工數控係統按照任(rèn)務劃分的特點,從任務和功能 2 個方麵進行劃分,任務劃分不僅使功(gōng)能模塊間(jiān)的通訊(xùn)接口設計更為合理和軟件的結構清晰,還使得係統設計的開放(fàng)性和(hé)擴展性更強。 通過分析齒輪(lún)加工數控係統(tǒng)的功(gōng)能要求, 可知本係統應具備控(kòng)製和管(guǎn)理 2 個任務。 控製任務分為譯碼、機床 I/O 控製、位(wèi)置控製、電子齒輪箱和插補處(chù)理等子任務;管理任務又分為自動編程、界麵管(guǎn)理、文(wén)件管理、加工監控和通訊等子任務。 控製任務與齒輪的(de)加工息息相關,決定加工(gōng)的效率與精度,因此控製任務的實時性要求強(qiáng);管理任務負責齒輪(lún)加工的外在支持,因此(cǐ)其子任務沒有實時性的要求。
(1)自動(dòng)編程模塊
由於齒輪結構的相近性(xìng),在齒輪數(shù)控加工(gōng)中,主要有 3 類參數:齒輪(lún)參(cān)數、刀具參數與工藝參數。 操本文從機床操作(zuò)界麵輸(shū)入以上 3 類參(cān)數,自動編程模塊對其(qí)處理後,獲得刀具運(yùn)行軌跡數(shù)據,然後生(shēng)成數(shù)控加工代碼, 最終要生成(chéng) DSP 能識別的數據(jù)結構,進而控製機床,加工出符合要求的齒輪(lún)。
(2)電子齒輪箱模塊
電子齒輪箱模塊是以軟件和電路的形式取代傳統(tǒng)的機械式內聯(lián)係傳(chuán)動鏈,以完成多個數控軸按照既定的關係運動,以確保各(gè)軸的同步(bù)關係。 另外,為了保證工件軸與(yǔ)刀具軸運(yùn)動(dòng)之間(jiān)的速比(bǐ)關(guān)係
,工件軸的速度由刀具軸與其他進給軸的速度(dù)聯合決定。
(3)通(tōng)訊功能
通訊模塊的任務是將 ARM 中的數據下發到DSP 中。 如:動靜態參數 、PLC 程序數(shù)據和 NC 程序數據(jù)等。 另外,通信模塊還負責將 DSP 中編碼器中的反饋(kuì)數據、PLC 執行狀態、報警信息等上傳到 ARM中(zhōng)處理和顯示。
(4)加工監控模塊
加工監控模塊可以分為加工(gōng)圖形(xíng)監控、機床狀態(tài)監控和報警信息監控 3 個部分(fèn)。 加工圖形監控包括運行坐標和各個數控軸跟蹤誤差監控;機床狀態監控包括機床(chuáng)的本體和附件狀態監控;報(bào)警信息監控包括報警內容、報警後自診斷和曆史記錄查詢監控。
3、滾齒自動(dòng)編程研究實現
滾(gǔn)齒加工是加工齒輪的常用方法之一(yī),有徑向、軸向、切向、徑向軸向和對角等方法。 其中軸向滾切法常用來加工圓柱齒輪、圓錐齒輪等外齒輪,本文以軸向滾切法為例進(jìn)行說明(míng)。
3.1 構建數(shù)學模型
(1)確定滾齒對刀點
為了保證工件的加工精度,避免切入時間或空(kōng)行程(chéng)時間過長,要(yào)求(qiú)對刀(dāo)方便、準確。 在加工時,把滾刀對準齒坯的上頂麵, 確定其在(zài) Z 軸(zhóu)方向的位置,滾刀在齒坯圓柱麵上的淺淺切痕確定其在 X 軸方向(xiàng)的位置。 對刀時,當滾刀進給到齒(chǐ)坯的圓柱麵時,讓齒坯運動一周(zhōu),以查看其展成運(yùn)動正確與否。
(2)確定滾刀加工軌(guǐ)跡和計(jì)算關鍵坐標點
以軸向滾(gǔn)切法為例,如圖 2 所示(shì),滾刀的運動軌跡是 0→1→2→3→4→1。 滾刀(dāo)的起點位置是機床的零點;再快速到位置 1;同時,電子齒輪箱功能開啟,使滾刀徑向進給到位置 2;為了切出全(quán)齒寬,滾刀軸向運動至(zhì)位置 3;最後退刀至位置 4,一次進給加工結束。由此可見,這 5 個關鍵位置非常重(chóng)要。另外,加工齒輪類型(xíng)不同,關(guān)鍵位置也不同,要依據具體情況而(ér)定。
①滾刀起始點 用(X0,Z0) 表 示 , 依據加工情況而定(dìng),如圖(tú) 2 所示,滾刀零點位(wèi)置為:(X0=L,Z0=W);
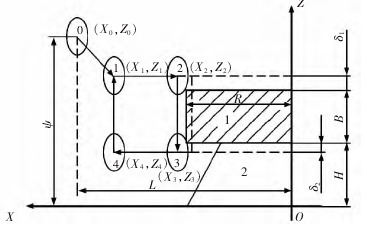
圖2 軸向滾切法滾刀的運動軌跡(jì)
②關鍵點 1 用(X1,Z1)表 示 ,在工作中 ,關鍵點1 是滾刀循環(huán)切削的(de)起始(shǐ)位置。 為了(le)減少切入時間和空行程,可取滾刀切削刃距離齒(chǐ)坯 3 mm 處作為位置 1 在 X 軸方向的坐標位置,Z 軸方(fāng)向的切入行程δ1要通過(guò)查(chá)閱齒輪加工手(shǒu)冊得知。結合圖 2 可(kě)知關鍵(jiàn)點 1 的(de)坐標值為(X1=R+r+3,1=H+B+δ1);
③關鍵點 2 用(X2,Z2)表(biǎo)示,是滾刀(dāo)開始對齒坯(pī)進行切削的位置(zhì),其在 X 軸方向的(de)位置是由(yóu)齒坯半徑、 滾刀半徑和第 1 次進給深度確定 ap1,ap1這個值由用戶輸入,Z 軸(zhóu)坐標值 Z2與 Z1一樣。 結(jié)合圖 2 可知關鍵點 2 的坐標值為(X2=X1-ap1,Z2=Z1);
④關鍵點 3 用(X3,Z3)表示,是滾刀循(xún)環(huán)切削的結束位置, 其在 X 軸方向的位置與關鍵點 2 的一樣,Z 軸坐標(biāo)值由(yóu)齒坯厚度、安裝高度以及切出行程(chéng)確定(dìng)。 結合圖 2 可知關鍵點 3 的坐標值為[X3=X2,Z3=H-δ2=Z2-(B+δ1+δ2)];
⑤關鍵點 4 用(X4,Z4)表 示 ,是滾刀退出位置 ,其在 X 軸(zhóu)方向的(de)位(wèi)置與關鍵點 1 一樣,Z 軸坐標值Z1與關鍵點 3 一樣。 因此, 關鍵點 4 的(de)坐標值為(X4=X1,Z4=Z3)。
(3)滾刀和工件的運動關係
①滾(gǔn)刀與齒坯的轉(zhuǎn)速關係齒坯做展成運動時的轉速ni=Ktnt/zw式中 nt———滾刀轉速,r/min;Kt———滾刀頭數;zw———齒坯齒(chǐ)數。
②工件的附加轉速工件(jiàn)附加轉(zhuǎn)速nf=±vf/Pz式中 vf———用戶輸入的滾刀(dāo)軸向進給速度,r/min;Pz———齒坯的螺旋線導程,mm。
③工件的實際轉速nw=ni±nf逆滾加工時(shí), 滾刀(dāo)和齒坯的螺旋線方(fāng)向一致時取+,反之(zhī)為-;
若順滾加工,滾刀和齒坯的螺旋線方向相同時(shí)取+,反之為-。
3.2 模(mó)塊架構與實現
通過對滾齒加(jiā)工(gōng)過(guò)程中的功能(néng)需求進(jìn)行分析,確定了自動編程模塊由參數輸入、參數檢查(chá)和參數處理組成,如圖 3 所示。
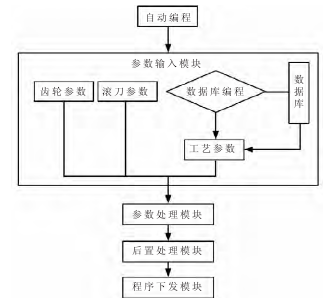
圖3 滾齒加工自(zì)動編程模塊流程圖
界麵、滾刀參數輸入界麵和工藝參數輸入界麵,以便操作者通過其輸入(rù)齒輪參數、滾刀參數和工藝參數;為了確保輸入的(de)參數能滿足加工要求,自動(dòng)編程模塊在後(hòu)台對操作者(zhě)輸入的參數檢查,若參數有(yǒu)誤,該功能模(mó)塊會提示(shì)並提(tí)供給(gěi)用戶錯(cuò)誤原因,直到(dào)參(cān)數正確再(zài)進行參(cān)數(shù)處理;參數處理(lǐ)是對(duì)滾刀加工軌跡和(hé)關鍵點進行分析處理,生成(chéng)數控(kòng)代碼,進而對程序代碼進行編譯,生成 DSP 需要的數據格式,再由通訊模塊將編譯後的程序發到 DSP 緩存區,為插補(bǔ)運動做好準(zhǔn)備。
首先,要建立起齒(chǐ)輪參數輸入(rù)4 結語(yǔ)本文介(jiè)紹了嵌入(rù)式(shì)齒輪加工數控係統(tǒng)的總體框架設計(jì),並對該係統進行了任(rèn)務(wù)劃分,設計了自動編程模塊(kuài)、電子齒輪箱模塊、通訊模(mó)塊、加工監控等多(duō)個模(mó)塊。
最後,分析了滾齒的加工工藝,在本係統的硬件平台上,對滾齒自動編程技術做了(le)詳盡的研究,將自動編程技術應(yīng)用在滾齒的(de)加工中。 為今後提(tí)高齒輪加工(gōng)控製係統的(de)精度奠定了一定的基礎。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表(biǎo),或進行資訊(xùn)合作,歡迎聯係本網編輯部, 郵(yóu)箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表(biǎo),或進行資訊(xùn)合作,歡迎聯係本網編輯部, 郵(yóu)箱:skjcsc@vip.sina.com
更多相關信息

業界(jiè)視點
| 更多(duō)

行業數據
| 更多
- 2024年11月 金(jīn)屬切削機床產量數據
- 2024年11月 分地區金屬切削(xuē)機床產量數據
- 2024年11月 軸承(chéng)出口情況
- 2024年11月(yuè) 基本(běn)型乘用車(chē)(轎車)產量數據
- 2024年11月 新(xīn)能源汽車產量數據(jù)
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產量數據
- 2024年10月(yuè) 軸承出口(kǒu)情況
- 2024年10月 分地區金屬切削機床產量數據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產(chǎn)量數據
- 2028年8月 基本型乘用車(轎車)產量數據