



基於PMAC運動控製器的3-LJPU並聯機構 數控係統的實現
2018-4-17 來源:黑龍江大學機電上程學院 作(zuò)者:李(lǐ)廣,魏永庚,李春豔
摘要:以3-UPU並聯機構機械本(běn)體為控製對象,利用齊次坐標變換(huàn)進行該機構的運動學分析。推導了正逆解(jiě)公式。開發了以IPC + PMAC運動控製器為核心的主從(cóng)開放式數控係統框架,並以此為基礎設計了數控硬件係統,繪製了電(diàn)氣接線圖與接線表。搭建了該數控係統軟件界麵,完成了上位機程序和下位機程序的編寫(xiě)。最後以典型運動軌跡為例,驗證數控係統的可行性。
關鍵詞: 3-UPU並(bìng)聯機構; 數控係統; 正逆解; PMAC運動控製器
並聯機構又稱並(bìng)聯運動(dòng)學機構或虛擬軸機構,最為人熟知的是1965年由(yóu)德國人Stewart首次提出的Stewart機構,該機構(gòu)由6個液壓缸支撐和驅動(dòng),用於對飛機進行飛行模擬,機構(gòu)可以獲得自由度的位(wèi)置和姿態(tài).
我國第一台並聯機器人實驗(yàn)樣(yàng)機由燕山大學於1991年研製成功,其後中科院、清華大學、哈爾濱(bīn)土業大學(xué)、天津(jīn)大學都研製了(le)各(gè)種用途的並聯機器人,許多研究成果達到了(le)國際先進水平。並聯機(jī)構是區別於傳統串聯機構的一種新型機構,由於傳統串聯機構(gòu)組成環節多,機構複雜,存在懸臂部分造成機(jī)構笨重,很(hěn)難(nán)獲得高的加工(gōng)速(sù)度和精度,而並(bìng)聯機構通過兩條或兩條以上獨立支鏈以閉環方式連接定平台和動平台,使得這種機構剛度重(chóng)量(liàng)比大,響(xiǎng)應速度快,無誤差積累,解(jiě)決了串聯機構存在的問題(tí),越來越受到工程界的廣泛重視。
數控係統是並聯機構係統的核心,其性(xìng)能的好壞直接決定機構運行的(de)可靠性和運行(háng)精度。傳統數控係統是封閉式數控係統,即控製器由專門的生產(chǎn)廠(chǎng)家(jiā)提供,不同的生產廠(chǎng)家提供的控製器擁有不同編程語言和操作係統,這種係統的集成能力差,功能相同的兩個模塊由於其生產廠家的不同而不能通(tōng)用,係統的維護(hù)和升(shēng)級必須依賴生產廠家,一(yī)些新興的計算機技術不能在封閉式數(shù)控係統中得到很好的應用,用戶也很難定製符合自身生產需(xū)求的數控係(xì)統。在一(yī)些加工需(xū)求多樣的控(kòng)製場合,封閉式數控係統不能滿足現代設備個性化生(shēng)產的需求。目前,關於並聯機構數控係統的研究有很多,但大多數研究都選取聯機構數控係統中的某一模塊(kuài)進行重點(diǎn)研(yán)究,缺乏對(duì)完整數控係統的分析。基於PC機的開放式數控(kòng)係統既克服了傳統NC係統開放性差,不易進行模塊化(huà)設計(jì)的缺點,又充分利用了(le)PC機兼容大(dà)量CAD軟件以及其龐大的網絡資(zī)源(yuán),成為(wéi)現在使用最為廣泛的數(shù)控(kòng)係統(tǒng)。
1、運動學分析
並聯機構由於獨特的結構,使其(qí)坐標(biāo)空間和關節(jiē)空間存在非線性映射關係,也造成其運動學(xué)逆解求解簡(jiǎn)單(dān),運動(dòng)學正解求解複雜(zá)。求解並聯機構運動學逆解(jiě)方法有多種,如向量法、歐拉角法,但這些方法都存在一定的弊端,如向量法描述動平台位置的變化,卻(què)不能體現(xiàn)其(qí)姿態的變化。歐拉角法需要將位置與姿勢分開來描述其動平(píng)台位姿。本文使用齊次坐標變換的方法將動平台位姿通過齊次矩陣一次性轉化(huà)到(dào)定坐標係中。3-UPU並聯機構結構簡圖見圖1。
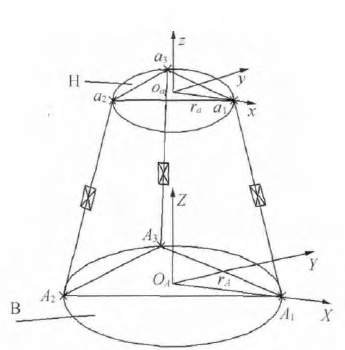
圖1 3-UPU 並聯機構簡圖
3-UPU並聯機構動平台和定平台(tái)都為等邊三角(jiǎo)形,在動平(píng)台所(suǒ)處平麵H建立笛片爾坐標係Oa-xyz,選取等邊三角形外接圓圓心Oa為(wéi)原點坐(zuò)標(biāo),等邊三角形三頂點a1, a2, a3為虎克鉸安裝位置,外接圓半徑為rn,在定平台所處平麵B建立笛片爾坐標(biāo)係 OA- XYZ,選取等邊三角形外接(jiē)圓圓心OA為原點坐標,等邊三角形三頂點(diǎn) A1,A2,A3為虎克鉸安裝位置,外接圓半徑為 rA。
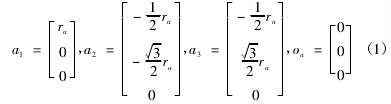
動平台各頂點在動(dòng)坐標係中的坐標可表示為:
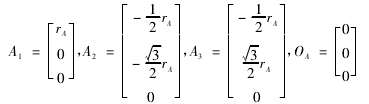
定平台各頂點在(zài)定坐標係中的坐標可表示為:
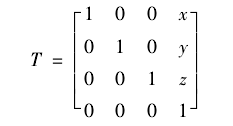
為了在定坐標係中表示動平台各頂點坐(zuò)標,需(xū)要(yào)引入齊次矩陣,其一般表示為:
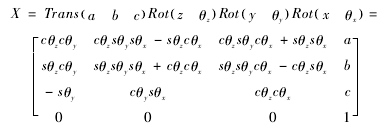
式中(zhōng) θx、θy、θz為動坐標係(xì)繞定坐標係中 X、Y、Z 3 軸旋轉角度; [a b c 1]T為動坐標係在靜坐標係中的位置矢量; sθ為sinθ; cθ為 cosθ。
3-UPU 並聯機構動平台(tái)實現空間(jiān)內 3 個方向的平(píng)移,其旋轉角(jiǎo)度為 0°,故將 sinθ=0.cosθ=1 代入式(3) 中,得到 3-UPU 並(bìng)聯機構旋轉矩陣為:
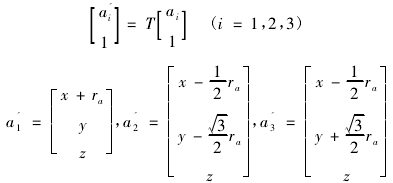
利用齊次矩陣代入式(shì)(5) 可求得定平台各頂點(diǎn)坐標在定(dìng)坐標係中的表示如式(6) 所示:
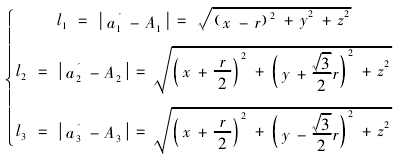
在已知動平台中心點坐(zuò)標時,利用空間內兩點間距離公式可(kě)求得連接杆(gǎn)件的長度即運動學逆解(jiě)方程:
對式(7) 進行代數運(yùn)算(suàn)可求得其運動(dòng)學正解方程:
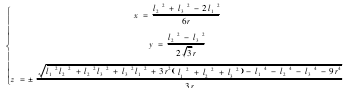
式中 l1,l2,l3為 3 條連接杆杆(gǎn)長; [x y z]為動平(píng)台中(zhōng)心點坐標; r = rA- ra為定平(píng)台與動平台外(wài)接圓半徑的差(chà)值。
以上利用齊次坐標變換方法對 3-UPU 並聯機構進行運(yùn)動學分析,求取(qǔ)了機(jī)構的運動學(xué)正逆解,為數(shù)控係統設計提供了理論依據。
2、硬件係統(tǒng)搭建
本文采用基於 PC + NC 的開放式數控(kòng)係統設計理念,利用研華 610L 作為(wéi)上位機實現控製任務,如運動(dòng)軌跡生成、伺服軸狀態監測、數控任務管理(lǐ)、人機交互界麵的編寫,使用泰道公司生(shēng)產TurboPMAC Clipper 運動(dòng)控製器作為下位機,實現伺服指令的產生、插補軌跡生成、PLC 順(shùn)序控(kòng)製任務的實現,伺服係統采用鬆下 A5 係(xì)列伺服(fú)驅動器與伺服電機,數控係統硬件結構見圖2。
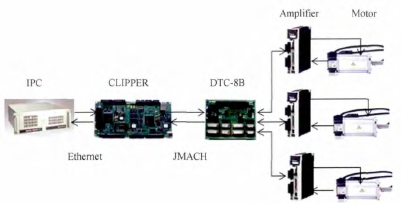
圖(tú)2 數控係統硬件結構
3、軟件係統實現
3-UPU 並聯機構數(shù)控係統軟件功能分為兩部(bù)分: 上位機使用 VC + + 編寫上(shàng)位機人機交互界麵,實現伺服(fú)係(xì)統數據采集與顯示,典型運動軌跡的生成,下位機運動程序及 PLC 程序的執行(háng)的控製和功能按鈕區功能,其中典型運動軌跡生成模塊使用 VC+ + 與 MATLAB 混合編程方法實(shí)現,上位機通過在 VC + + 中調用 PCOMM32 動態鏈接庫與下位機進行通信。下位機(jī)利用 PMACExecutive Pro2 Suite 軟件包中的(de) Pewin Pro32組件(jiàn) 編 寫 運 動 程 序,運 動 學 程 序 和 PLC程序。
上位機人機交互(hù)界麵見圖 3,采用模塊化設計理念開發,其中包括數控係統狀(zhuàng)態監測模(mó)塊、電機手動控製模塊、複雜軌跡選擇模塊、下位機變量操作模塊、下位機程序控製模塊和(hé)功能按鈕區模塊 6 部分。下位機運動學正逆解程序編寫是利(lì)用 PMAC 所支(zhī)持的編程語法,將運動學正反解寫入下位機中,在運動程序執(zhí)行階(jiē)段,當給定動平(píng)台(tái)中心點(diǎn)運動軌跡後,首先通過運(yùn)動學反解求得連杆長度的變化量,進而計算出電機所需脈衝個數,控製電機運轉,之後(hòu)運行運動學正解方程判(pàn)斷動(dòng)平台中心點是(shì)否運動到指定位置。下位機 PLC 程序功能可以實現數控係統的(de)初(chū)始化和運(yùn)動程度(dù)的順序執行。
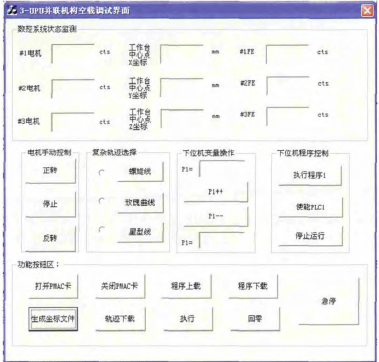
圖3 人機交互界麵
4、係統性(xìng)能測試
數控係統安裝與調試主要任務包括數控硬件(jiàn)係統的安裝和參(cān)數配置,以及數控軟(ruǎn)件的調試。
數控係統參數配置主要是為運動控製(zhì)器和驅動器配置合適(shì)參數以滿足(zú)控製係統主要的需求。運動控(kòng)製器參數配置(zhì)是對其全局變量的配置,包括(kuò)運動控(kòng)製器工作模式選擇、伺服門陣(zhèn)列頻率設定、上下位機通信參數配置。驅動器參數配置(zhì)是包括控製參數選擇、指令(lìng)脈衝輸入輸出方式的(de)確定、編碼(mǎ)器分辨率的(de)確定等。
數(shù)控(kòng)係統軟件調試是在上位機人機交互界麵中,通過設置典型運動軌跡合(hé)適參數,在上位機中將運動軌(guǐ)跡離散化(huà),並將(jiāng)離散點以文本文件格式下載到下位機中執行然後在下位機中進行數(shù)據(jù)采集,典型軌跡運行結果見圖4。
由圖(tú) 4 可見,並聯機構動平台確實按照(zhào)設置軌跡完(wán)成相應運動,證明了係統(tǒng)可行性。
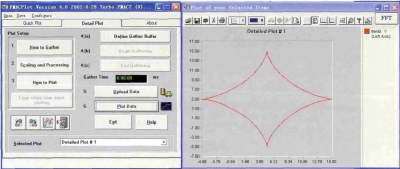
圖4 典型軌(guǐ)跡運行結果
5、結論
本文以 3-UPU 並聯機構為控製對象(xiàng)設計了(le)數控係(xì)統,係統地闡述了數控係統開發的(de)流程,通過對並聯機構運動(dòng)學分析(xī),推導了其運動學正(zhèng)逆解方程。硬件係統搭(dā)建部分完成了設(shè)備選型,操作台設計和設備集成(chéng)。軟件係統開發了上位機人機交互界麵、運動學程(chéng)序和運動學正逆解程序等。係統安裝調試部分將各模塊安裝在操作台前後(hòu)麵板上(shàng),配置了(le)數(shù)控係統參數,以(yǐ)典型運動軌跡為例驗證(zhèng)了係統的可行性。
投稿箱:
如果(guǒ)您(nín)有機床行業、企業相(xiàng)關新聞(wén)稿件發表,或進行(háng)資(zī)訊合作,歡(huān)迎聯係本網編輯(jí)部(bù), 郵箱:skjcsc@vip.sina.com
如果(guǒ)您(nín)有機床行業、企業相(xiàng)關新聞(wén)稿件發表,或進行(háng)資(zī)訊合作,歡(huān)迎聯係本網編輯(jí)部(bù), 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業界視點
| 更多
牌(pái)調查")
行業數據
| 更多
- 2024年11月 金屬切削機床產(chǎn)量數據
- 2024年11月 分地區金屬切削機床產量(liàng)數據
- 2024年11月 軸承(chéng)出口情況
- 2024年11月 基本(běn)型乘用車(轎車)產量數據
- 2024年11月 新能源汽車(chē)產量(liàng)數據
- 2024年11月 新能源汽車(chē)銷量情況
- 2024年10月 新能源汽車產量(liàng)數據
- 2024年10月(yuè) 軸承出(chū)口情況(kuàng)
- 2024年10月 分地(dì)區金屬切(qiē)削機床(chuáng)產量數據
- 2024年10月 金屬切削機床產量數據(jù)
- 2024年(nián)9月 新能源汽車銷量情況(kuàng)
- 2024年(nián)8月 新能源汽車產量數據
- 2028年8月 基本型乘用(yòng)車(轎車)產量數據
博文選萃
| 更多
- 機械加工過程圖示
- 判斷一台加工(gōng)中心精度的幾種辦(bàn)法(fǎ)
- 中走絲線切割機床的發展(zhǎn)趨勢
- 國(guó)產數控係統和數控機床何去何從?
- 中國(guó)的技術工人都去哪裏了?
- 機械老板做了十多(duō)年,為何還是小作坊?
- 機械行業最新自殺性營銷,害人害己!不倒閉才
- 製造業大逃亡
- 智能時(shí)代,少談點智造,多談(tán)點製造
- 現實麵前,國人沉默。製造業(yè)的騰飛,要(yào)從機床
- 一文(wén)搞懂數控車床(chuáng)加工刀具補償功能
- 車床(chuáng)鑽(zuàn)孔攻螺(luó)紋加工方法及工(gōng)裝設計(jì)
- 傳統鑽(zuàn)削與螺旋銑孔加工(gōng)工藝的區別