


車床絲光杠(gàng)機動托架
2016-11-14 來源:蘭州蘭石能源裝備工程研究院有限公司 作者:張海強 宋傑
摘要:確定機架和活動構件數及組成運動副兩構件間的相對運動(dòng)特性。
關鍵詞:定位(wèi)準確;安(ān)全可靠(kào);高效(xiào)
在(zài)現代金屬切削機床中,工作台(溜板箱)進給中,常常由於機床絲杠和(hé)光杠(以下簡稱兩杠)因其自重而產生彎曲變形,從而影響機床的加工精度以及產生爬行等現象。統計資料表(biǎo)明,當兩杠(gàng)長度為5 m時,因其彎曲變形而產生(shēng)的下(xià)垂量約為6 mm;當兩杠長度為8 m時,因其彎曲變形而(ér)產生(shēng)的下垂量約為12 mm。兩杠彎曲變形,不僅影響(xiǎng)傳遞運動(dòng)的精度和平穩性,而且對機床(chuáng)的(de)使用壽命也十分不利,是產品設計中不容忽視的重要因素。為了解決這一問題,須在兩(liǎng)杠下部適當部位增加輔助支撐以(yǐ)提高其剛度。輔助支撐有多種形式,如:手動托架、隨動托架和機動托架。其中以機動托架為最佳,它能在溜板箱(xiāng)接(jiē)近時自動地脫開兩杠,縮進機床床身內(nèi),當溜板箱遠離後又自動地伸出並重新(xīn)托住兩杠,整個過程完全自(zì)動,既保證了運動的性能,又減輕了(le)操(cāo)作(zuò)者的勞動強度。因此(cǐ),機動托架在長規(guī)格臥式車床上得到了廣泛的應用。
1.托瓦運動軌跡
根據機動托架功(gōng)能,托架上托瓦的運動軌跡如圖(tú)1所示。
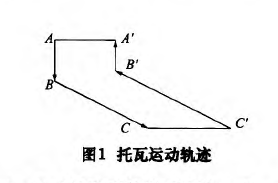
其中:4一B,托瓦下(xià)降脫開兩杠;B_c,托瓦縮(suō)進床身內。當溜板箱遠離(lí)托架一定距離後,托瓦的運動軌(guǐ)跡與上述相(xiàng)反,即:C’一B’,托(tuō)瓦伸出床身(shēn)外;曰’一A’,托瓦上升托住兩杠。當曰7一A’托瓦上升複位後,托瓦重新托住兩杠。由於運動軌跡有一個明顯(xiǎn)的轉(zhuǎn)折,故一般的(de)四連杆機構(gòu)(平麵(miàn))不易實現,我公司大型產品上的機動托架為(wéi)一個六連杆機構(gòu),如(rú)圖2所示。
(1)托(tuō)瓦下降
托架動作(zuò)過程,選定構件(jiàn)1為主動(起始)構件,當其向(xiàng)右(yòu)移動時,如設法(fǎ)使構件5不動,則構件2必然順時(shí)針旋轉,構(gòu)件3逆時針旋轉,構件(jiàn)4以D為中心逆時(shí)針旋轉,使(shǐ)E轉(zhuǎn)到E’位置,即由實線位置移至虛線位置,如圖(tú)2a所示,即(jí)實現了托瓦下(xià)降,脫開兩杠。
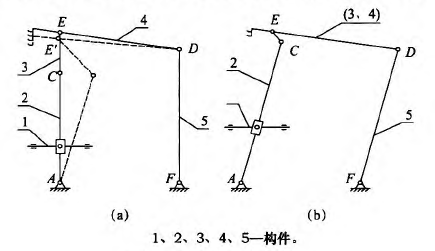
圖2托架機構運動原理圖
(2)托(tuō)瓦縮進
當構件1繼續向右移動並推動構件2沿順時針繼續轉動時,迫使構(gòu)件3與構(gòu)件4合為(wéi)一(yī)體,此時構件便由六連杆轉化為五連杆,構成一個四連杆基本杆組,如適當選取各構件的長度(使(shǐ)其成為一(yī)個平行(háng)四(sì)連杆機構),即可實現托瓦的後退,縮到床(chuáng)身內適(shì)當位置,如圖2b所示。
2.托架設計要點
我(wǒ)們(men)知道,要使平麵連杆機構按正確的運動規律動作,其充分必要的條件是在全(quán)部(bù)運動過程中機構的自由度數與起始(shǐ)構件(主動件)數相等。對此機構(gòu)來說,起始構件(jiàn)數(shù)為1個,所以在整個過(guò)程中,其自由度(dù)數必須(xū)始終保持1。為了實現托瓦下降(jiàng)及後退的軌跡,機構在運動中存在(zài)一個由六(liù)連杆轉(zhuǎn)化為五(wǔ)連(lián)杆機(jī)構的過程,所以必須設計(jì)這樣一種約束。它隻在機構運動過程中(zhōng)的某一部分起約束作用,而在另一部分(fèn)應失去約束作用,以使運動(dòng)全過程中(zhōng)機構的自由(yóu)度始終保持為l,從而確保運動的準確、可靠。
3.機動托架工作(zuò)原理
本機動托架安裝在床身上(shàng),並由安裝在溜板箱下麵的控製板7(如圖3)來控製托瓦(wǎ)的下降離開兩杠,或上升托住兩杠。當軸(zhóu)1向右移動時,使托瓦下降並縮進床身內(nèi);當溜板箱移過機動托架後,軸1向左移動,使托瓦伸出床身並上升托(tuō)住兩杠。我公司大型(xíng)臥式車床上所采用的伸縮式機動托架(jià),經過不斷改進和多年使(shǐ)用,實踐證明,這種托架是目前較為理(lǐ)想的一種結構,其工作原理如圖3所示。大拖板在運動過程中,當溜板箱接近兩杠托架時,固定在溜板箱上的控製板7,首先觸動滾子2,使軸1向右移動。此時,機構為一平麵六連杆機構,其中軸1、連杆3、連杆4、托架5、連杆9為5個活動構件,相當於圖2a中構件l、2、3、4、5。即A、B、C、D、E、F為6個平麵低(dī)副(fù),G點為一高(gāo)副。撞塊6固定在托架5上(shàng)(可調(diào)),螺栓8和lO固定在床(chuáng)身上,螺栓8隻限製撞塊6,同(tóng)時也限製托架(jià)5水(shuǐ)平向(xiàng)右移動,而螺栓10隻限製連杆9水平向左移動。因此,撞塊6、螺栓8和10共同構成了一個高副,限製了機(jī)構水平方向的一個自由度。所以,機構(gòu)的自(zì)由度為:
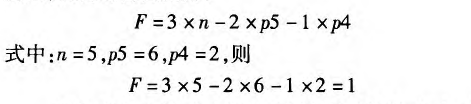
此時,當軸1推動(dòng)連杆3,使其(qí)順時針轉動時,連杆9不動,所(suǒ)以,連杆4逆時針轉動,托架5逆時針轉動,實現了托瓦的下降,脫開兩杠(gàng)。在托架5上設(shè)計有
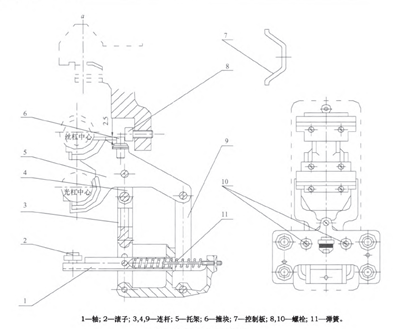
圖3機動拖架工作原理圖
一小凸台,通過計算,使其位(wèi)置滿足這樣的條件:當托瓦脫開(kāi)兩(liǎng)杠時,撞塊6有3.2 mm以上下降量,這時,使連杆4相對於托架5不可能繼(jì)續轉動,而視為一體,機構則轉化為(wéi)五連(lián)杆機(jī)構(gòu),活動構件數為4個(gè),即軸(zhóu)1、連(lián)杆3、連杆4(或托架5)和連杆9,低副數為5個,即圖2b中構件l、2、3(或4)、5。即A、曰、c、D和,點。由於此時撞塊6和螺栓8已脫離接觸,而連杆9的運動趨勢是順時針轉動,故螺栓10對它失去約束(shù)作用,所以此時隻剩G點(diǎn)一個(gè)高副,機構的自由度數仍為:
所以,當軸1繼續向右移動而推動連杆3順時(shí)針轉(zhuǎn)動時,由於連杆3、托架5、連杆9及機架構成一(yī)個平行四連杆機構,故托(tuō)瓦沿(yán)一(yī)斜線後移,直到移(yí)至床身內的預定(dìng)位置。
當溜(liū)板箱移過托(tuō)架位置後,控(kòng)製(zhì)板7向相反的方向推動滾子2,而在彈簧1l的作用(yòng)下也使軸1向左移動,與(yǔ)此同時,連杆4與托架5仍靠在一起,機(jī)構的自(zì)由度仍(réng)為l。所以,軸1帶動連(lián)杆(gǎn)3逆時針轉(zhuǎn)動(dòng),並通過托(tuō)架5帶動連杆9逆時針轉動(dòng),使托瓦(wǎ)移(yí)出床身。當托瓦移至兩(liǎng)杠下方後,連杆9與螺栓10接觸,使連杆9不能繼續轉(zhuǎn)動,連杆3在軸1的帶動下繼續逆時針轉動,使(shǐ)連杆4和托架(jià)5順時(shí)針轉動,托瓦抬起並重新托住(zhù)兩杠(gàng)。這樣(yàng)就完成了(le)一個動作循環(huán)。
4.結語
車床絲光杠(gàng)機動托架,經過我公司多年實踐驗證(zhèng),自(zì)動控製性能穩定,無(wú)衝擊,無(wú)振動,係統剛性強,加工零件精度高,質量好,為操(cāo)作者解脫了繁重的勞動,生產效率(lǜ)高。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資(zī)訊合作,歡迎聯係本網編輯部(bù), 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資(zī)訊合作,歡迎聯係本網編輯部(bù), 郵箱:skjcsc@vip.sina.com
更(gèng)多相關信息

業界視點
| 更多

行業數據
| 更多
- 2024年11月 金屬切削機床產(chǎn)量數據
- 2024年11月 分(fèn)地(dì)區金屬切削機床產量數據
- 2024年11月(yuè) 軸承出口情況(kuàng)
- 2024年11月(yuè) 基本型乘用(yòng)車(轎車)產量數據
- 2024年11月 新能(néng)源汽車產量數據
- 2024年11月 新能源汽車銷量情(qíng)況
- 2024年10月 新(xīn)能源汽車產量數(shù)據
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切削機床(chuáng)產量數(shù)據
- 2024年10月 金屬切削(xuē)機床產量數據
- 2024年9月 新能源汽車銷(xiāo)量情況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本(běn)型乘用車(轎(jiào)車)產量數據