



基於LabVIEW的橡塑自送(sòng)料機器人遠程監控係統
2020-3-12 來(lái)源: 河北工業大學機械工(gōng)程 河北托利智能 作者:穀裕 李(lǐ)健 付建生 師占群
摘(zhāi)要:開發基於LabVIEW的橡塑自送料機器人遠程監控係統,介紹監控係統的總體設計和硬件構成以(yǐ)及軟件模塊實現的關鍵技術。該監控係統(tǒng)可(kě)以在(zài)線監控機器人的運行狀態,隨時抽取任何關注點的運行信號並進行分析,提高現(xiàn)場工作人員對機(jī)器人的掌控和故障檢測能力。
關鍵(jiàn)詞:機器人;虛擬儀器;遠程監控係統;LabVIEW
隨著中國製造2025的快速推(tuī)行,工廠智能化技術不斷發展(zhǎn)和應用,計算機自動(dòng)控製和管理已成為現代企業的發展方向 ,機器人代替人進行生產操作(zuò)已成為企業發展的方向(xiàng),特別是在勞動強度大、工作(zuò)危險性高的(de)場合,更是企業技術(shù)升級的首選。橡塑膠塞除(chú)邊工序過去一直沿用人工上下料實現模切,執行效率低,具有潛在的危險性。橡塑自送料機器人可以實現膠塞模切(qiē)工序自(zì)動上料,從而有助於實現(xiàn)醫用膠(jiāo)塞生產過程自動化。為(wéi)進一(yī)步提高機器人的技術(shù)水平(píng),本工作研發了一套自送料機器人的遠程監控係統。
本係(xì)統采用個人電腦(PC)作上位機,以可(kě)編程邏(luó)輯控製器(PLC)和NI采集卡作(zuò)下位機,利(lì)用用於過程(chéng)控製的對象鏈接與嵌入(rù)(OPC)技術和LabVIEW實現了下位機的數(shù)據采集(jí)、數據處理、停機報警、顯示和保存。本係統不僅能實時監控橡塑自送料機(jī)器人的數據運行,將機器語言轉化為操作者熟悉的可視(shì)化界麵(miàn),還能實現機器性能的檢(jiǎn)測和遠程監控,在(zài)機器故障時發出報警。本係統在為某公司最新研發的膠塞模切自送料橡塑(sù)機器人中取得了很(hěn)好的(de)應用效果。
1、監控係統的總體設計
橡塑自送料機器人分為送料流程和放料流程,主要(yào)由上料係統、輸(shū)送係統、空料(liào)檢測係統、機械手換位係(xì)統、直線導軌、平整度檢測係統、成品回收係統、廢料回收係統等構(gòu)成,送料和放料流程分別如圖1和2所示。
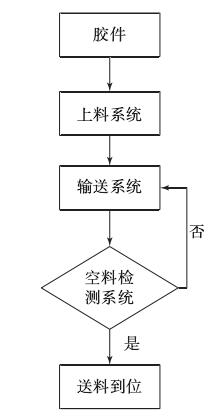
圖1 送料流程
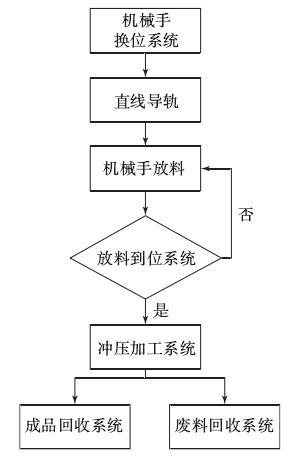
圖2 放料流程
自送料機(jī)器人首先運行送料流程,將膠件放入上料係統中,由上料係統運送到輸送(sòng)係統中,在輸送係統中加(jiā)入空料檢測係統,若有料則送入指定的(de)位置,等機械手抓取之後輸送下一個膠件;當膠件放入指定位置後,啟動放料流程(chéng),由機械手抓取膠件通過直線導軌送入放料位(wèi)置,若檢測放料到(dào)位,啟動壓床衝壓膠件,分別回收成品(pǐn)與廢料,機械(xiè)手回歸原位,等待下一次送料到位。
橡塑自送料機器人包含伺服電機、減(jiǎn)速器、限位開關、光柵尺、編碼器、氣缸、紅外傳感器、開(kāi)關、觸摸屏等,各類傳感器實時采集數據(jù),並將(jiāng)測試值(zhí)輸送給PLC,PLC再通過(guò)伺服(fú)電機、氣缸(gāng)等控製相關執行元件。
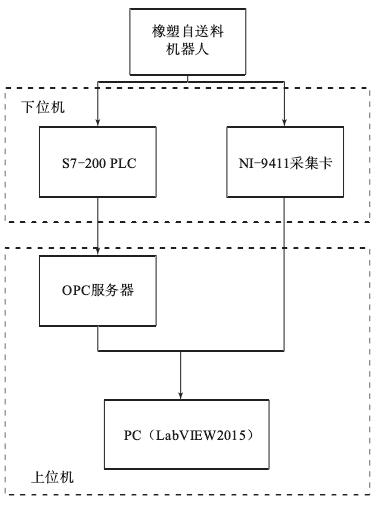
圖3 自送料機(jī)器人遠程監控係統總(zǒng)體結構
自送料機器人(rén)遠程監控係統總體結構見圖3。通過對橡塑自送料(liào)機器人的分析,明確了遠程監控係統的主要任務(wù)。係(xì)統運行時(shí),基(jī)於LabVIEW2015開發的上(shàng)位(wèi)機軟件(jiàn)通過SIEMENS的OPC服務器讀取S7-200 PLC上所有數字數據,並根據用戶要求設計相應的監控模塊。安裝在伺服電機上的編碼器和(hé)導軌上的(de)光(guāng)柵尺分別將脈(mò)衝傳送給NI-9411采集卡,采集卡將采集到的信(xìn)號轉化為(wéi)角度和位移變化量和方向。通(tōng)過PLC和NI-9411采集卡兩部分的配合,實現對橡塑自送料機器人的整體監控。
2 、硬件設計
硬件配置1台計算機、1台SIEMENS S7-200 PLC、編碼器、光柵尺、數字量輸入模塊、電源、兩台NI-9411數(shù)字(zì)采集卡、USB-PPI電纜、連接線等。其中,數字量輸入模塊用於采(cǎi)集橡塑自送(sòng)料機器人的數字信號,包括限位(wèi)開關(guān)信號、伺服電機脈衝數、氣缸運行信號、紅外傳感器信號等。光(guāng)柵尺用於(yú)采集膠件輸送位置,編碼器用(yòng)於(yú)采集伺服電機旋轉(zhuǎn)角(jiǎo)度,USB-PPI電纜(lǎn)用於實現(xiàn)S7-200 PLC與(yǔ)LabVIEW2015之(zhī)間的通信,將上位機采集數字量輸入模塊采(cǎi)集(jí)的傳感器(qì)數據和S7-200 PLC在橡塑自送料機器人運行期間產生的變化量傳遞給上位(wèi)機。NI-9411采集卡具有(yǒu)比OPC服務器調用數據更快(kuài)的采樣頻率,用於采集編碼器和光柵尺的脈衝信號,該係統配置的S7-200 PLC和NI-9411采集卡如圖4和5所示。

圖4 係統配置的S7-200 PLC

圖5 係統(tǒng)配置的NI-9411采集卡
本係統中光柵尺和編碼器都(dōu)屬於(yú)增量式光電編碼器,輸出兩組相位(wèi)差為90°的方波脈衝信號,脈衝數表示位移大小,因為編碼器A相和B相(xiàng)具(jù)有90°的相位差,通(tōng)過比較A相還是B相在前,可以(yǐ)判別編碼器的方向,以此來判斷(duàn)膠件(jiàn)的運行方向。編碼器和光柵尺與NI-9411采集卡的接口電路如圖6所示。
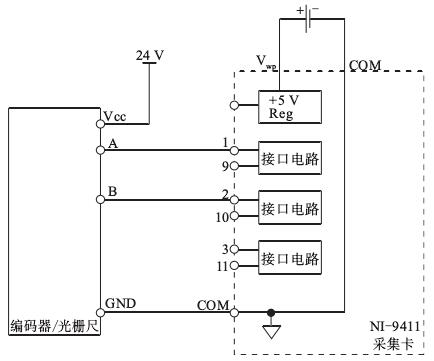
圖6 編碼器/光柵(shān)尺與NI-9411采集卡的接口電(diàn)路
3 、 軟件設計
軟件設計部分需要(yào)實現的功(gōng)能包括(kuò)控製參(cān)數(shù)設定、數據實時顯示、數據實時存儲、查(chá)詢、分析、故(gù)障判斷 。根據以上功(gōng)能需求,係統設(shè)計采用以下軟件:LabVIEW2015,SIMATIC Step 7 V4.0,S7-200 PC Access V1.06,其中LabVIEW2015用於編寫監控(kòng)程序和界麵程序,並(bìng)通過DataSocket技術訪問OPC服務器;LabVIEW2015與S7-200 PLC的連接需要(yào)配(pèi)置OPC服務器,S7-200 PC Access V1.06是S7-200 PLC專用的OPC服務器,用於配置OPC服務器,提供S7-200 PLC與LabVIEW2015的 連 接(jiē) 通 道。SIMATIC Step 7 V4.0用於分析PLC程序,優化監控的內容與流程。根據模塊化的設計思想,本係統采用狀態機和生產者/消費(fèi)者設計(jì)模式相結合的方式編寫程序,可維護性強。軟件設計流程見圖7。
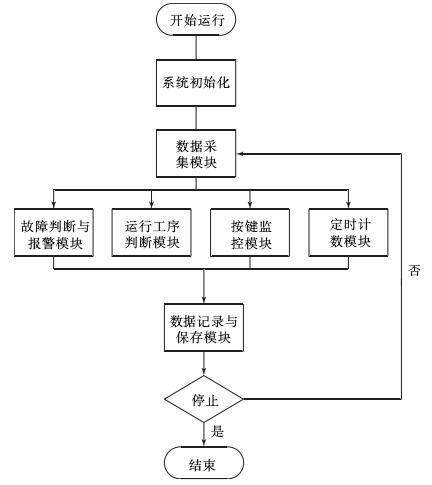
圖7 軟(ruǎn)件設計流程
3. 1 數據采(cǎi)集模塊
3. 1. 1 LabVIEW與PLC通信實現
OPC服務器是基於微軟的對象鏈接與嵌(qiàn)入(OLE)、組件對象模型(COM)和分布式組件對象模型(DCOM)技術(shù),定義了一套標準的接口,采用客戶(hù)/服務器模式,隻要硬件廠(chǎng)商提供OPC服務器(qì)接口,就可以在OPC服務器(qì)客戶端讀(dú)取PLC中的信息。采用OPC服務器的優(yōu)勢在於(yú),連接PLC不需要根據PLC的型號(hào)而重新編寫程(chéng)序,隻需要對OPC服務(wù)器進行(háng)簡單設(shè)置就可以通信。
SIEMENS S7-200 PLC 有 專 門 的 OPC 服 務(wù)器程序 PC Access,可設(shè)置PLC的變量和地址,設置完成後,在LabVIEW2015中采用DataSocket函數訪問OPC服務器。對OPC服務器的(de)訪(fǎng)問有兩種方法,可以通過編程將前麵板的控件與OPC服(fú)務器對應的變量(liàng)綁定(dìng),從而實時訪(fǎng)問PLC數據,見圖8。其中,OPC://代表OPC協議,localhost代表主機名,S7-200. OPCServer代(dài)表OPC服(fú)務器名,Microwin. NewPLC運(yùn)行(háng)按鈕(niǔ)為項目名。
3. 1. 2 LabVIEW與光(guāng)柵尺、編碼(mǎ)器的通信實現
數據(jù)采集(DAQ)模塊通過在LabVIEW中創建、編輯、運(yùn)行NI-DAQmx虛擬通道和任務,可(kě)以很方便地幫助用(yòng)戶實現(xiàn)數據采集操作。
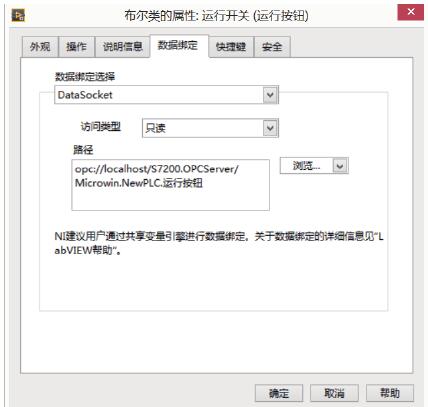
圖8 LabVIEW控件與OPC數據綁定窗口
本係(xì)統通過DAQ模塊分別創建光柵尺、編(biān)碼器兩個虛(xū)擬通道和任務,設定好光柵尺輸入端、光柵尺A相和B相、編碼器輸入端、編碼器A相(xiàng)和B相、采樣間隔(gé),再根(gēn)據光柵尺和編碼器的分(fèn)辨率設定光柵尺的脈衝間隔和編碼器(qì)的脈衝,通過DAQmx讀取虛擬通道(dào)(VI)和(hé)定時循環結構實現數據采集。再將采集到的數據通過通知器發送到從循環,在從循環實現50個點求(qiú)和平均測速,並且加入超時報(bào)警。程(chéng)序每次采集(jí)的數據文件均實時存儲在電腦指定的文(wén)件夾中,方便查看。光柵(shān)尺和編碼器的程序分別如圖9和10所示。
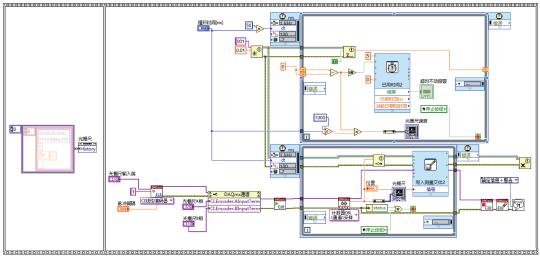
圖9 光柵尺讀取(qǔ)和測速(sù)程序
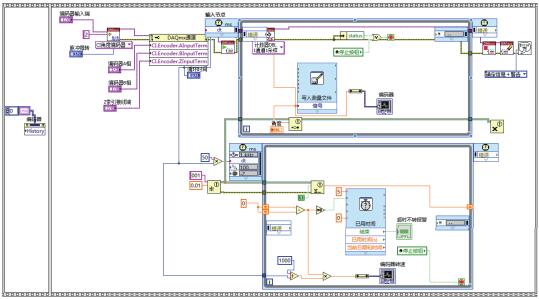
圖10 編碼(mǎ)器讀取和測速程序
3. 2 運行工序(xù)判斷模(mó)塊
根據橡(xiàng)塑自送(sòng)料機器人的工藝流程(chéng),每個工序對應的PLC程(chéng)序中均設置(zhì)標誌位。在S7-200 PLC執行每個工序時,標誌位的數據也(yě)發生變(biàn)化,LabVIEW2015程序(xù)通(tōng)過檢測標誌位數據(jù)的變化,實時顯示當前橡塑自送料機器人的運行(háng)工序,再根據S7-200 PLC程序中的運行標誌位,判(pàn)斷橡塑自送料(liào)機器人的運(yùn)行狀態。工序和係統(tǒng)狀態顯(xiǎn)示程序(xù)如圖11所(suǒ)示。
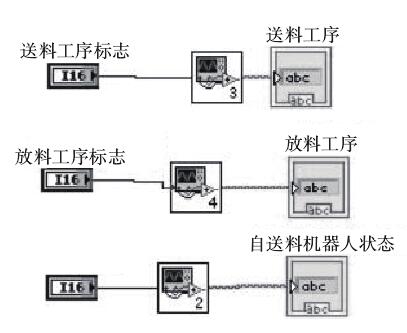
圖11 工序和係統狀態顯示程序
3. 3 按鍵監控模(mó)塊
機(jī)器人的啟動(dòng)和停止離不開對(duì)啟動按鍵和停止(zhǐ)按(àn)鍵的(de)控製,對按鍵的監控可以了解機器人啟動和停止時間(jiān),所以本係(xì)統添加了對按鍵的監控,可以記錄啟(qǐ)動(dòng)按鍵(jiàn)和停止按鍵時間,且保存在指定的路(lù)徑下。通過(guò)對啟動按鍵和停止(zhǐ)按鍵時間的分析,可得出機器人(rén)運行時間。按鍵監控程序如圖12所(suǒ)示。
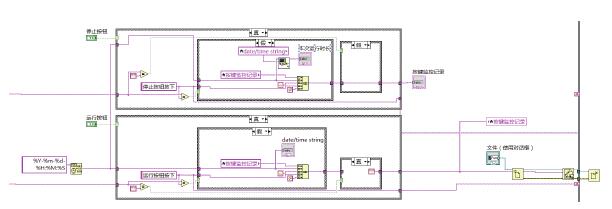
圖12 按鍵監控程序
3. 4 定時計數模塊
根據用戶需要,在橡塑自送料機(jī)器(qì)人運行過程中,需測試一定時間內的輸送能力,即記錄限(xiàn)定時間內的送料次數(shù),本(běn)係統針對此要求設計了定時計(jì)數模塊,如圖13所示。設置好(hǎo)定時的時長,點擊開始(shǐ)計數按鈕,每放(fàng)料成功1次,計數器計數自(zì)動加1,等到已用時間超過定時時長時(shí),計數(shù)器的數值不會發生變化,並且自動計(jì)算(suàn)自送料機器人平(píng)均每次送料的時間。
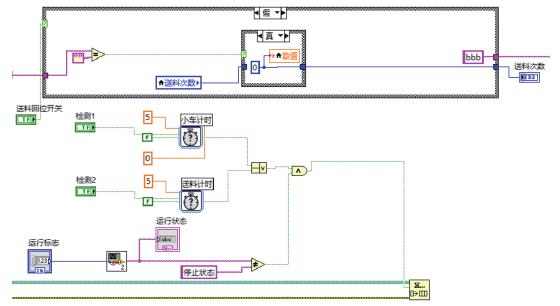
圖13 定時計數模塊
3. 5 故障判斷與(yǔ)報警模塊(kuài)
根據對橡塑自送料機器人(rén)的分析,送料到(dào)位、回位,放料(liào)到位、回位的時候(hòu),都(dōu)會(huì)給PLC發一個脈衝,如果在限定的時間內,PLC沒有收到這個(gè)脈衝,則說(shuō)明機器發生故障,因此本係統設(shè)計了故障判斷與報警模塊,如圖(tú)14所示。采用生產者/消費(fèi)者設計模式,當在5 s內沒有接收到脈衝(chōng)且自送料機器人(rén)處於運行狀態時,係統發出停(tíng)機報警,且給出故障發生(shēng)的時間,並將故障信息按日期分類記錄在程序所在的目錄下。
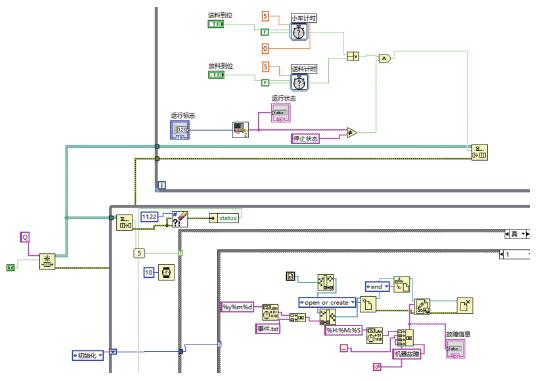
圖14 故障判斷與報警(jǐng)模塊
3. 6 遠程(chéng)通(tōng)信實(shí)現
遠程通信是(shì)工業自動化生產的必(bì)要功能,遠程通信的(de)功能就是把現場設(shè)備當作(zuò)服務(wù)器(qì),將遠端的設備當作客戶端。將客戶端的前麵板與服務(wù)器的前麵板同步,達到控製客戶端程序,相當於控(kòng)
製服(fú)務器前麵(miàn)板(bǎn)程序的目的。
首先,配置本地LabVIEW2015的WEB服(fú) 務器。LabVIEW2015支持用戶程序(xù)通過WEB發布(bù),通過創建一個HTML文檔並嵌入VI或者獨立應用程序的前麵板。在使用遠程監控功能前,必須在服務器端配置WEB服務器,配置過程如下:(1)打開工具菜單的WEB發布(bù)工具,選擇(zé)需要遠程(chéng)監控的VI,查看模式,選擇內嵌,點擊下一步;(2)設置顯示界麵標題(tí)為橡塑機器(qì)人遠程監控係(xì)統,頁眉與頁腳設置為空,點擊下一步;(3)按照用(yòng)戶要求配(pèi)置每項需求的網址,點擊啟動WEB服務器,即可完成設置。
其次配(pèi)置客戶端的遠(yuǎn)程監控(kòng)。客戶端計算機務必與服(fú)務器計算機保(bǎo)持一(yī)致的LabVIEW Run-Time引擎,連接方式(shì)有(yǒu)兩種:(1)新建1個VI,點擊操作菜單下的連接遠程前麵板指令,在彈出的對話(huà)框中輸入配置的服(fú)務器地址、端口和VI名稱,選擇是否請求控製,點擊連接按鈕,即可對(duì)服(fú)務器程控進行瀏覽和控製;(2)通過IE瀏(liú)覽(lǎn)器連接服務器,在(zài)網址欄輸入配置WEB服務器配置的URL地址即可(見圖15)。
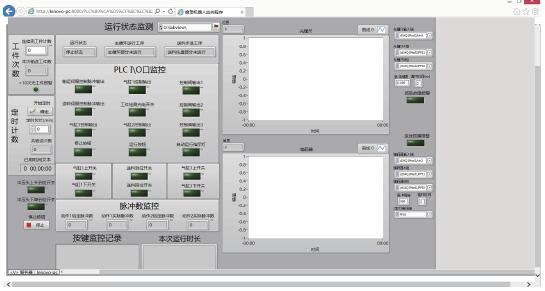
圖15 通過網頁查看(kàn)和控製VI前麵板
4 、試驗與結果
係統在橡塑自送料(liào)機器人(rén)上實際運行結果表明了機器人運行正(zhèng)常以及(jí)基於LabVIEW的橡塑(sù)自(zì)送料機器人監控係統的可靠性與便利性。PLC信息監控界麵見圖16,界麵選取了現階段(duàn)重點關注的運行信號,若增加其他關注點,可以直接抽取(qǔ)運行信號進(jìn)行分析。編碼器與光柵尺顯示與記錄界麵見圖17。

圖16 PLC信息監控界(jiè)麵
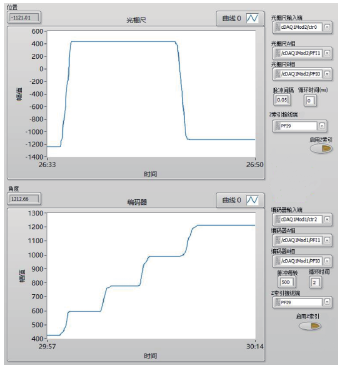
圖17 編碼(mǎ)器和光柵尺顯示與記錄界麵
5 、結論
通過對橡塑自送(sòng)料機器人運行狀態的(de)觀測和PLC程序開發的基於LabVIEW的橡塑自送料機(jī)器人(rén)遠程監(jiān)控係統(tǒng)能很好地完成橡塑(sù)自送料(liào)機器(qì)人運行過程中的遠(yuǎn)程監控任務,人機交互界麵清晰(xī),操作方便(biàn)。該監控係統不但可以在線監控機器人的運行狀態,還可以隨時抽取任何(hé)關注點的運(yùn)行信號進行分(fèn)析,提高了現場工作(zuò)人員對機器人的掌控(kòng)和(hé)故障檢測能力。該監(jiān)控係統(tǒng)工作穩定,實(shí)用性強,可擴展性強,已成功應用於(yú)某新型橡塑自送料機器人係統。
投稿箱:
如果(guǒ)您(nín)有機床行業、企業相關新聞稿件發表,或進行資(zī)訊合作,歡迎聯係本網編輯(jí)部, 郵箱:skjcsc@vip.sina.com
如果(guǒ)您(nín)有機床行業、企業相關新聞稿件發表,或進行資(zī)訊合作,歡迎聯係本網編輯(jí)部, 郵箱:skjcsc@vip.sina.com
更(gèng)多相關信息

業界視點
| 更多
查")
行業數據
| 更多
- 2024年11月 金屬切削機床產量(liàng)數據
- 2024年11月(yuè) 分地區金屬切削(xuē)機床產量數據
- 2024年11月 軸承出口情況
- 2024年11月(yuè) 基本型乘用車(轎車)產量數據
- 2024年11月 新能源汽車產(chǎn)量數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新(xīn)能源汽車產量(liàng)數據
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切削機床產量數據
- 2024年(nián)10月(yuè) 金屬切削機床產量數據
- 2024年9月 新能(néng)源汽車銷量情況(kuàng)
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本型乘用車(轎車)產量數據