


摘要:近年來,隨著國民經濟的(de)不斷發展,傳統的手工牙簽包(bāo)裝已經無法滿足市(shì)場的(de)需求。為了提高生(shēng)產效率,降低生產成本,本文(wén)基於四方CA100伺服係統所設計的牙簽全自動包(bāo)裝機(jī)控製係統,自動完成送膜、包裝、封膜及切割,運行穩定、生產效率高。
關鍵詞:牙(yá)簽包裝機(jī) 伺服 控製係統
1 、 引言
包(bāo)裝機械大致可(kě)以分(fèn)為立式包裝機與枕式包裝機。牙簽(qiān)包裝機(jī)屬於立式包裝,它主要依靠自身重力,必(bì)要時輔以一定的機械作用便可完成包裝,而且立式(shì)包裝(zhuāng)機一(yī)般都具有兩(liǎng)種包裝功(gōng)能,機器運轉時采用哪種包(bāo)裝方式(shì)取決於(yú)包裝膜上分是(shì)有光標還是沒有光標的(de)。沒有光標的包裝膜隻需滿(mǎn)足所有機構線速度相同即可,而(ér)采用光標裁切,則需通過光標定位實現包(bāo)裝。近日,采一套基(jī)於四方CA100伺服(fú)驅動器及觸摸屏所設計的(de)牙(yá)簽全自動包裝機控製係統成功應用於浙江某機械廠,運行穩定、生產效(xiào)率(lǜ)高。
2 、 工藝分析
牙簽包裝機主要由送膜(mó)裝置、送料裝置、封膜裝置以及切割裝置構成。其(qí)中送膜在(zài)設備的前後各有一部分,由送(sòng)膜輥和送膜軸組成,主要負責把上(shàng)下兩層包裝膜平整、均勻地送至封膜處,並與送料裝置送來的牙簽一起橫向封合。隨(suí)後在送至切(qiē)割裝置進行分包切割最後送至成品區(qū)。整個包裝的(de)工(gōng)藝流程如圖1所示。
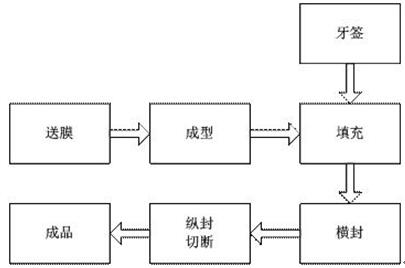
圖1 工藝流程
牙簽包裝機實物如圖2所示。膜通(tōng)過送(sòng)膜軸(zhóu)帶動送膜輥旋轉(zhuǎn)送入封膜輥中,在初始位置有一個色標傳感器,它通過(guò)與非色標區相比較(jiào)來檢測特定(dìng)色(sè)標或物體上的斑點。色標傳感器實(shí)際是一種反向(xiàng)裝置(zhì),光源垂直於目標(biāo)物體安裝,而(ér)接收器與物體(tǐ)成銳角方向安裝,讓它隻(zhī)檢測來自目標物(wù)體的散射光,從而避免傳感器直接接(jiē)收反(fǎn)射光,並且可(kě)使光束聚焦很窄。其中,送(sòng)膜輥和拉膜輥是同步相連,封膜輥和切刀輥是(shì)同步相連,從而簡化(huà)了整個設(shè)備運行的過程。
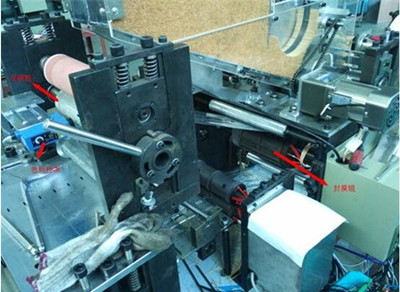
圖2 牙簽包(bāo)裝機
3 、控製係統原理及架構
牙簽自動包裝機控製係統整體結構如圖3所示。
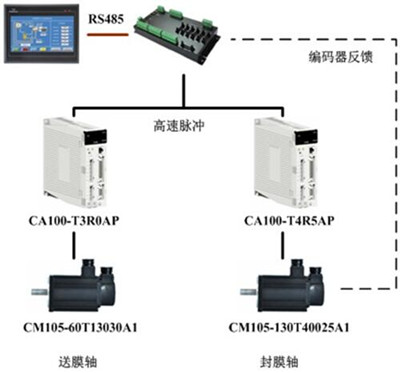
圖3 控製係統整體結構
係統(tǒng)由傳統上下位機結構組成,上位機由EM1-070E係列觸摸屏作為(wéi)人機界麵進行設備操作、參數(shù)設定及顯示等功能。下位機是一台運動控製器(qì),完成自動運行過程中(zhōng)送(sòng)膜軸和封膜軸的定(dìng)位(wèi)控製。執行(háng)機構由CA100係列伺服係統(tǒng)完成。
包裝機有兩種工作模式:即膜有光標和無光標。無光標情(qíng)況下,兩個伺服(fú)間隻需要進行簡(jiǎn)單(dān)的速度同步,使得送膜輥和封膜輥在線速度上一致,保證整個膜在運(yùn)行過(guò)程中各部分速度相同即可。而有光(guāng)標模式下,封膜的位(wèi)置必須嚴格與色標的位置重合(hé),這就需要送膜軸和封膜(mó)軸二者之間建立位置凸輪關係,在送膜軸將色標送(sòng)到封膜輥處,封膜的封口也需(xū)要同一時間到達相同的位置,二者之間類似一個飛剪(jiǎn)機(jī)構,整個過程由運動控製器控(kòng)製伺服完成。
4 、係統硬件及調試
牙簽(qiān)自動包裝機控製係統的硬件部分主要(yào)包括伺服係統,運動控製器,觸摸屏這幾部分,其中在整個設備(bèi)運行過程中最(zuì)重要的還是伺服(fú)係統(tǒng),它決定了控製係統的整體定位精度以及響應性(xìng)。
4.1 伺服係統及參數設置
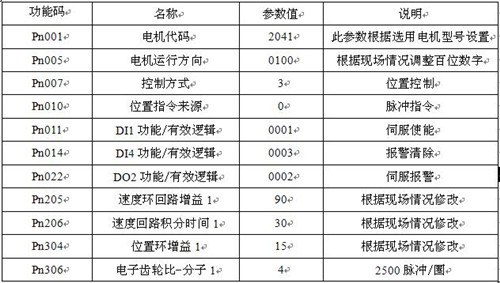
伺服(fú)係統主要包含了送膜伺服和封(fēng)膜伺服,本次設計中送膜伺服選用了CA100-T3R0AP係(xì)列,封膜伺服為CA100-T4R5AP,主要參數如下表所示(shì):
表1 送膜(mó)伺服驅動器參數(部分)表
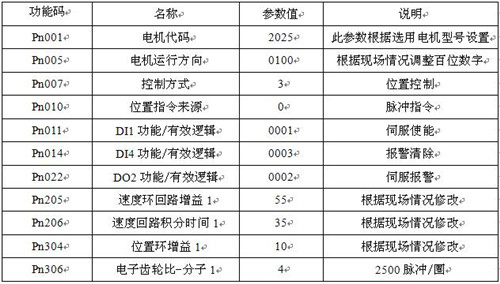
表2 封膜伺服驅動器參數(部分)表
4.2 整機調試
整機調試為測試係統的整體性能是(shì)否(fǒu)能滿足實際生(shēng)產的各項要求。整機(jī)調試需(xū)要注意以下問題:
(1)有光標模式下,設備(bèi)啟動前必須回零。
(2) 由於(yú)是麵板電位(wèi)計進行自動時速度(dù)調節,調(diào)試時開機前請確認速度是合(hé)理。
4.3 係統電氣圖
牙簽自動包裝機控製係統的電氣圖如(rú)圖4所示。
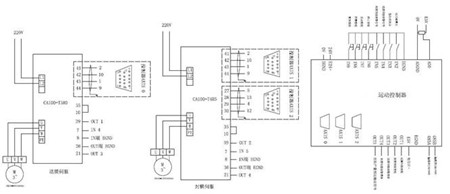
圖(tú)4 係統電氣圖紙
5 、係統軟(ruǎn)件設計(jì)
5.1 上位(wèi)機軟件設計
HMI主界麵如圖5所示,可(kě)進行產量的設定,並(bìng)顯示設備的當前運行的速度、產能、產量、機械和報警狀態等信息。整個人機(jī)界麵分配了兩級用(yòng)戶,分別提供給終端用戶和設(shè)備廠家,二者各自有各自的登陸ID及密碼,在特定的(de)界麵中(zhōng),不同級別的用戶享有不同權限的參數設置。
如圖6所示參數(shù)設定界麵,所有用戶均可對機械及包裝參數(shù)進行設定,滿足更多包裝的場(chǎng)合。設備的運行方式(shì)及界麵的(de)語言均可以在此界麵中進行修改(gǎi)。

圖5 HMI主界麵
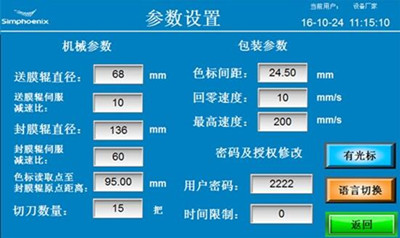
圖6 參數設置界麵
5.2 下(xià)位機軟件設計
下位(wèi)機軟件主要是運動控製器(qì)的程(chéng)序設計。主要包括色標檢測糾偏(piān)、色標遮沒及(jí)偏離、送膜和封膜兩軸的電子凸輪控製三大部分。
由於機械以及(jí)色標噴塗(tú)的誤差,設備運(yùn)行過(guò)程中色標與封膜位置會出現偏差(chà),為(wéi)了產品(pǐn)的質量,因此必須進行糾偏。本此(cǐ)設計的控製係統利(lì)用在送膜初始端的色標傳感器檢(jiǎn)測的色標個(gè)數計算出膜所行走的距離,與封膜電機編碼(mǎ)器反饋回的脈衝所折算(suàn)的距離進行比較,得出的偏差(chà)在凸(tū)輪控製(zhì)中進行補償,使得(dé)色標與封膜位置始終保持在同一位置合理誤差範圍之內(nèi),保證了成品的(de)質量。
程序內色標內遮沒功能,可有效避免包裝膜(mó)汙染,色標錯印所引起的光(guāng)電誤動作,增加了整個(gè)係統(tǒng)的穩定性。並且在色標偏離色標傳感器檢測範圍時,係(xì)統會自動停(tíng)機並報警告知操作員。
6、 結(jié)束語
本文基於四(sì)方電氣機電產品所(suǒ)設計的牙(yá)簽自動包裝機控製係統,較好(hǎo)的解決了傳統的手工牙(yá)簽包裝的效率(lǜ)低、成本高的問(wèn)題。程序內部采用色標糾偏算法及凸輪控製,解決了生產過程中色標偏離、位置不準的問題。采用四方CA100係列伺服及EM1係列觸(chù)摸屏,性能(néng)穩定、兼容性好、操(cāo)作簡便。係統穩定可靠(kào),生產效(xiào)率高,滿足實際生產需求並得到了最終客(kè)戶的認(rèn)可。
如果您(nín)有機床行業、企業相關新聞稿件發(fā)表,或進行資訊合(hé)作,歡迎聯係本網編輯部, 郵箱(xiāng):skjcsc@vip.sina.com
州金馬(mǎ)")
牌調查")
- 2024年11月 金屬(shǔ)切削機床產量數據
- 2024年11月 分地(dì)區金屬切削(xuē)機床產量數據
- 2024年11月 軸承出(chū)口情(qíng)況(kuàng)
- 2024年11月 基本型乘用(yòng)車(chē)(轎車)產量數據
- 2024年11月 新能源(yuán)汽車產量數據
- 2024年11月(yuè) 新能源汽車銷量情況
- 2024年10月 新能源汽車產量數據
- 2024年10月 軸承出口(kǒu)情況
- 2024年10月 分(fèn)地區金屬切削機床產量數據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年(nián)8月 新能源汽車產量數據
- 2028年8月 基本型乘用(yòng)車(轎車)產量數據