描儀")



雷尼紹(shào)XL-80激光幹涉儀為線紋尺測量(liàng)係統提供精準可靠的位置補償解決方案
2019-6-18 來源:雷尼紹 作者:-
全自動線紋尺檢測設備
線紋尺 (Line scale) 一般由玻璃製成,表麵上準確地刻有等間距平行線(xiàn),通常配置在比長儀、顯(xiǎn)微鏡、測量儀器等長度測量設備上,作為測量距離和行程精度的重要參考基準。測量線紋尺上的刻度距離需要高(gāo)精度儀器,測量分辨率往往要求達到納米級,任何微小的環境因素所造成的誤差都會影響測量結(jié)果(guǒ)的準確性。附(fù)屬於香港特別行政區政(zhèng)府創新科(kē)技署的標準及校正實(shí)驗所(suǒ) (SCL) 設計並(bìng)製造了一台全新線紋尺測量(liàng)係統,其采用雷尼紹(shào)XL-80激(jī)光幹涉儀補償測量過程中因測量機台架設位置偏移所導致的(de)誤差。

案例分析: 雷尼紹XL-80 係列激光幹涉儀
香港特別行政區政府創新科技署轄下的標準及校正實驗所負責(zé)製定和維護(hù)香港地區的物理測量參考標準,並為本(běn)地的測量標準及測(cè)量儀器使用者提供校正服務(wù),以確保其準確執行測量工作,且能正確溯源至相關標準。除此之外,標準(zhǔn)及校正實驗所還為檢測及認證行業實驗室提供能力驗證服務,以證明他們具備相應的技術能力。
線紋尺測量係(xì)統的工作原理和結構
測(cè)量線紋尺上的刻(kè)度精度簡單來說就是測量被測線與參考線(一般是零位)之間的距離,結合影像分析和激(jī)光(guāng)補償技術,係統可計算並調整(zhěng)數據(線紋)讀取位置,從而減少阿貝誤差 (Abbe error)。不過(guò)在實際操作中,該(gāi)係統往往需要將更多(duō)實際環(huán)境因(yīn)素以及其他不確定(dìng)性計算在內,因此在設計時必須有效(xiào)地對各種(zhǒng)環境和人為因素所引起的誤差進行補償。SCL所研發的線紋尺測量係統主要由光學防震平台、移動平台、攝像頭、顯微鏡(jìng)、像素計算程序、光(guāng)學鏡組(zǔ)(包括分光鏡、反射鏡)及雷尼紹激光幹涉儀組成。線紋尺的長度測量範圍為0.01 mm到750 mm,而係統的測量不確定度(dù)僅為0.15 - 0.41 nm。
案例分析: 條紋尺測量平台
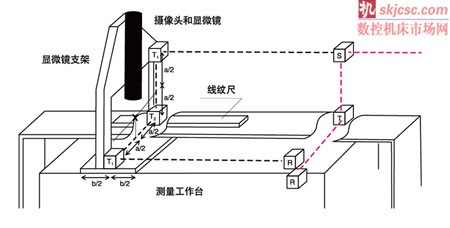
線紋尺測量係統配置了一台雷尼紹XL-80激光幹涉儀,用於對係統中(zhōng)出現的阿(ā)貝誤(wù)差進行補償。係統中(zhōng)的移動平台采用以壓電電機驅動的空氣軸承(chéng)平台,全長800 mm行程的直線度為0.9 um,重複(fù)精度達20 nm;最大扭擺、俯仰和滾擺角誤差分別為+/-0.5角秒。由於SCL位於大廈的35層,風和道路交通引起的(de)振動會影響測量精確度,因此必須將(jiāng)係統放置在光學防震平台上。在環(huán)境補償方麵,係統配置了空氣壓力、空氣(qì)溫度、材料溫(wēn)度和濕度(dù)傳感器。被測線紋尺放置在(zài)以光學平台為(wéi)基體的固(gù)定式獨立測量平(píng)台上,而攝像頭和顯微鏡則架設在可移動龍門式平台上,目的(de)是協助係統準確定位線紋的位置。因為每條線紋都有一定(dìng)的寬度,以線(xiàn)紋的中心線作為其位置可提升整體測量精度(dù)。換句(jù)話說,借助影(yǐng)像技術,係統可找出線紋(wén)的中心線並定義為線紋最終位置。
執(zhí)行測量時,移動平台根據係統發出的信號移動(dòng)並停留在被測線紋的默認位置。停頓後,激光幹涉(shè)儀讀(dú)取位置數據,同時攝像頭拍(pāi)攝目標線紋的影像進行分析,得出當前位置(以像素值(zhí)顯示(shì)與零位的距(jù)離)並與實際計算距離進行比對,係統根據差值指示移動(dòng)平台進行位置(zhì)微調。幹涉儀再次讀取位置數據。整個程序需要重複多次直到差(chà)值在特定像素值範圍(wéi)內,從而得出最終(zhōng)的線紋位置。
XL-80在係統中(zhōng)的應用
阿貝誤差簡單(dān)來說就是測(cè)量軸與被測工件運動軸之間的偏移所產生的(de)誤(wù)差,我們日常所用的遊標(biāo)卡尺是典型例子之一。在使(shǐ)用(yòng)遊(yóu)標卡尺進行測量時,夾住被測物的兩個端點(diǎn)與測量軸之(zhī)間一定會(huì)出現偏移情況,從而產生誤差。對於千分表來(lái)說,由於測量軸和被測工件的軸在同一條線上,因此阿貝誤差為(wéi)零。
案例(lì)分析: 條紋尺測量係統
雷尼紹(shào)XL-80激(jī)光幹涉儀在係統中(zhōng)所扮演的角色是補償(cháng)測量係統中的誤差,無論是移動平台的直線度、線紋尺的放置位置,還是反射鏡的(de)位置等,在架(jià)設時都難免會存在角度偏擺,導(dǎo)致在測量時出(chū)現所謂的阿貝誤差(chà)。係統在設計上使用激光幹涉儀,以對稱形式(shì)在移動平台兩邊(biān)的軸上進行(háng)測量,任何(hé)因角度(dù)偏移所導致的(de)阿貝誤差值改變都會被另一邊軸的激光所補償。而幹涉儀的架設采用了典型的線性測量(liàng)配置,激光束通(tōng)過分光(guāng)鏡S分成兩路,一路形成參(cān)考光束(shù)經轉向鏡T及反射鏡R回(huí)到激(jī)光源探測器,另一路則通過轉(zhuǎn)向(xiàng)鏡T1、T2、T3及反射鏡(jìng)R形成長度變化的測量(liàng)光束。另外,XL-80幹涉儀在測量過程中(zhōng)也補償了因環境造成的潛(qián)在誤差,其內置的壓力和濕度(dù)傳感器精度分別達(dá)1 mbar和(hé)6% RH,外置的材料和空氣傳感器精度(dù)分別達(dá)0.1和0.2度。數據顯示,在幹涉儀(yí)的幫(bāng)助下,係統整體(tǐ)減少約95%的阿貝誤差。

案例分析: 條紋尺運動平(píng)台
選擇合適的(de)激光幹涉儀
就激光幹涉儀而言,線性測量的精度不僅與(yǔ)激(jī)光頻率的穩(wěn)定性有關(guān),同時也取決於激光波長的已知精度。而在實際應用環境中,激光束通過空氣時,空(kōng)氣(qì)折射率往往會對激光波長產生影(yǐng)響,由於折射率隨著空氣(非真空環(huán)境)的溫度、氣壓和(hé)濕度而變化,因此必須對激光波長進(jìn)行補償以降低(dī)最(zuì)終(zhōng)的測(cè)量誤差。補償器通過傳感器測量工作環境的各個參數,自動計算這些參數對空氣折射率的影響,並調整激光(guāng)讀數以補償激(jī)光波長的變化,無需用戶幹預和經常(cháng)對(duì)補償進行更新。
雷尼紹XL-80激光幹(gàn)涉儀是目前(qián)市場上真正快速、精(jīng)確、便攜(xié)的校準係統。精確穩定的激光源和準確的XC-80環境補償器,保證了±0.5 ppm(在空氣環境中)的線性測量精(jīng)度。係統以(yǐ)高達50 kHz的頻率讀取數(shù)據,最高線性測量速度可達4 m/s,即使在最高速(sù)度下線性分辨率仍可達1 nm。所有測量選項(xiàng)(不僅是線性)均采用幹涉法測量,確保所(suǒ)記錄數據的精度(dù)。XL-80配備先進、易(yì)用的人性化操作軟件,為用戶提供最全麵的機器校準方案。
投稿箱:
如果(guǒ)您有機床行業、企業相關新聞稿件發表,或進(jìn)行資訊(xùn)合作,歡迎聯係本網編輯部(bù), 郵箱:skjcsc@vip.sina.com
如果(guǒ)您有機床行業、企業相關新聞稿件發表,或進(jìn)行資訊(xùn)合作,歡迎聯係本網編輯部(bù), 郵箱:skjcsc@vip.sina.com
更多(duō)相關信息

業界視點
| 更多

行業數據
| 更多
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分地區金屬(shǔ)切削機床產量數(shù)據
- 2024年11月 軸承出口情況
- 2024年11月(yuè) 基本型乘(chéng)用車(chē)(轎車)產量數據
- 2024年11月(yuè) 新能源汽車產量數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產量數(shù)據
- 2024年10月 軸承出口情(qíng)況
- 2024年10月 分地區金(jīn)屬切削機(jī)床產量數據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源汽車銷量情況(kuàng)
- 2024年8月 新能源汽車產量數(shù)據(jù)
- 2028年8月 基本型乘用車(chē)(轎車)產量數據
博文選萃
| 更多
- 機械加工(gōng)過程圖示
- 判斷一台加工中心精度的幾種辦法
- 中走絲(sī)線切割機(jī)床的發展趨勢
- 國產數(shù)控係統和數控機床何去何從?
- 中國的技術(shù)工人都去哪裏了?
- 機械老(lǎo)板做了十多年(nián),為何還是(shì)小作坊?
- 機械行業最新(xīn)自殺性營銷,害人害己!不倒閉才
- 製造業大逃亡
- 智能時代,少談點智造,多談點製(zhì)造
- 現實麵前,國人沉默。製造業的騰飛,要從機床(chuáng)
- 一(yī)文搞懂數控車床(chuáng)加(jiā)工刀具補償功能
- 車床鑽孔攻(gōng)螺紋(wén)加(jiā)工方法及工裝(zhuāng)設計(jì)
- 傳統(tǒng)鑽削與螺旋銑孔加工工藝(yì)的區(qū)別