描儀")



雷尼紹:先進位置編碼器技術(shù)提(tí)升光刻工藝水平(píng)
2019-5-6 來源:雷尼紹 作者:-
光刻技術,顧名思義就是一種(zhǒng)用光(guāng)刻印的技術(shù),它(tā)廣泛應用於半導體製造行業(yè)以及許多其他納米技術應用中;為適應當今微電子產品日趨微型化(huà)的趨勢,相關應用領域越來越需要具備高生(shēng)產(chǎn)能力的光刻設備。
本文探討了位置反饋技術在現代光刻工藝中的應用,以及最新光柵係統和傳統激光尺(chǐ)係統各自的優勢與潛能,這些特性為機器設計人員提供了極大的(de)靈活性(xìng),使其能夠探索如何在不影響(xiǎng)性能的前提下最大程度地減少光刻設備的占地麵積。
半導體製造
在光刻(kè)工藝中,通常首先在矽晶圓上沉(chén)積一層光敏性光致抗蝕劑材料(liào)(光刻膠)。然後,光(guāng)束通過光掩模照射到晶圓上,以將掩模圖形呈現在(zài)光(guāng)刻膠上,再使(shǐ)用顯影劑溶解掉經過曝光的光刻膠(jiāo)區域。最後,選(xuǎn)擇性地在晶圓表麵上的裸(luǒ)露(lù)區域內進行蝕(shí)刻(kè)或(huò)填(tián)充半導體、導電或絕緣材(cái)料。通過這種方式,便可構建出所需的多個微電子特征層(通常(cháng)要(yào)進行大約30次光刻流程)(參見圖1)。
圖1:顯(xiǎn)微鏡下的矽晶圓
浸沒式掃描光刻機(jī)包含一套透鏡係統(tǒng),用於使光束穿(chuān)過光掩模或“中(zhōng)間掩模”聚焦到半導體晶圓上。它還含有一組密封元件,可在物鏡和半導體襯底之間封入(rù)一定體(tǐ)積的液體,由於液體的光線折射率高於空氣(qì),因此(cǐ)可(kě)以獲(huò)得更高的光學分辨率和更小的特征尺(chǐ)寸。
在浸沒(méi)掃描中,光束保持固定,而由於透鏡的倒置效應,光掩模和晶圓需沿相(xiàng)反方向運動。這需要將(jiāng)位置精確反饋到光掩模(mó)和晶圓運動平(píng)台上的控製致動器,以實現高精度的運動控製。可使(shǐ)光源以(yǐ)一定頻率閃爍,以便每次曝光晶圓上的(de)不同區域。
光掩模與晶(jīng)圓襯底精確對(duì)準,使得每片掩模上的圖案均可精確刻畫到已經存在的蝕刻圖形層上(shàng)。這(zhè)一步驟是製造集成電路 (IC) 的關鍵:晶圓和光掩模(mó)上(shàng)的基準(zhǔn)點自動對準,誤差範圍(wéi)小於±20 nm,具體取決於IC的特征尺寸,並修正X、Y和θ(旋轉)方向上的偏置(zhì)。
每個平台的長距離增量式測量係統上(shàng)都需使用直(zhí)線光柵,以確保位置和速度都達到指(zhǐ)定的精度。高精度光(guāng)柵反饋使中間掩模和晶圓平台能夠串聯工作,實現以要求的覆蓋精度執行計劃(huá)掃描軌(guǐ)跡。激光尺和一些最先進的光(guāng)柵可以滿足這一半導體製造工藝(yì)的苛刻精度要求,例(lì)如雷尼紹的(de)最新光柵(shān)VIONiC™係(xì)列,其電子細分誤差低至 <±15 nm。
平板(bǎn)顯示器製造
平(píng)板顯示器 (FPD) 製(zhì)造中應用的傳統光刻工藝也用於半導體(tǐ)芯片製造。芯片研發的(de)一個主要驅動因素是電子設備尺寸的愈加微型化。另一方(fāng)麵,在(zài)FPD行業內,則按照能(néng)夠製造出的玻璃基板的(de)最大物理尺寸(單位為平方(fāng)毫米)對每一代製造技術進行分類。例如,第十代 (G10) FPD是從2880 mm×3080 mm的玻璃基(jī)板上切割的。薄膜晶體管 (TFT) 是(shì)必不可少的顯示(shì)器元(yuán)件,其臨界尺寸 (CD) 接近3微米,在好幾代製造工藝中都保持穩定。
每一代新產品(pǐn)都可加工出更大的基板,因此必須提(tí)高生產率(lǜ),實現通過單次曝光在基(jī)板(bǎn)的更大區域內形(xíng)成電路圖案。有人提出將(jiāng)多透鏡係(xì)統作(zuò)為(wéi)問題解決方案,以覆蓋更大區域。
然而,FPD行(háng)業的一個重大挑戰是(shì)製造和處(chù)理越來越大的光掩模,因為光掩模尺寸必須與基板尺寸成正(zhèng)比。無掩模(mó)投射係統逐漸流行,成為FPD生產中的替代技術。其中有這樣一種技術,即使用(yòng)空間光調製器 (SLM) 以類似(sì)於數字印刷的方式(shì)直接在基板(bǎn)上刻畫圖案。
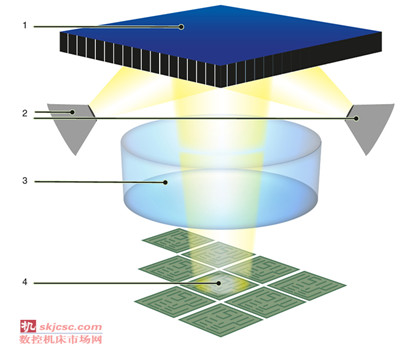
圖2:空間光調製器 (SLM) 成像單元
例如,一種並行光刻係統,如圖(tú)3所示,包含呈並行陣列排布的一組SLM成像單(dān)元,每個單元(yuán)又包含一個(gè)SLM壓模組件、一個球麵鏡、多個光源和一套投射透鏡組件,如圖2所(suǒ)示。SLM壓模組件是MEM(微機電係統)器(qì)件,具有數千個可控微型鏡組,通過鏡組的傾斜可使入射光(guāng)在透鏡焦平麵中產生高(gāo)對比度的明暗(àn)掩模圖案。需要精(jīng)確的運動控製來協(xié)調成像(xiàng)單(dān)元及其下(xià)方麵(miàn)積更大(dà)的基(jī)板運動平台。在這種(zhǒng)情(qíng)況下(xià),基板沿著X軸移動,SLM單元沿著Y軸移動,如同打(dǎ)印頭一樣(yàng)。兩個平台均由空氣軸承支撐,並由直線電機驅動。
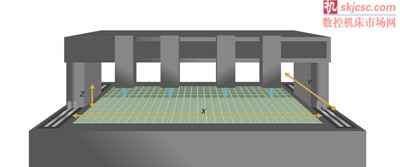
圖3:帶SLM成(chéng)像單元的並行光(guāng)刻係統
可以使用視覺識別係統通過基板平台上的參考標記來引導成像單元的運動。這類係統也可以配用卷對卷柔性基板。
在這類(lèi)製造係統中,除了提供用於直線電機換向的數據之外,位置傳感器反饋還有(yǒu)助於精確控製位(wèi)置。為了(le)達到FPD行業要求的對準精度,即 <±2微米,編碼器的分辨率要顯著(zhe)小於1 µm。高性能直線光柵和幹涉測量激光尺適用於此類應用(yòng),如雷尼紹的VIONiC光柵和(hé)RLE光纖激光尺係列。
未來的高通量納米蝕刻(kè)技術
現代光刻技(jì)術是在整個矽晶圓上掃描或步進光掩模,長期目標是以低成本實現納米級分辨率和高通量。無(wú)掩模直寫光(guāng)刻(kè)技術無需使用眾多昂貴的光掩模,而恰(qià)恰是掩模(mó)限製了最新型微電子器件(jiàn)的最(zuì)小可實現(xiàn)特征尺寸。
近場掃描光刻(kè) (NSOL) 特別適合這類應用,因為它可(kě)以突破分辨率的瑞利衍射極(jí)限。如(rú)圖(tú)4和圖5所示,NSOL技術使用具有納米尺寸孔徑的掃描探針作為掩模上(shàng)的“超衍射極限”光源,可在光學近場(chǎng)尺(chǐ)度範圍內直接寫入表麵特征。從(cóng)這(zhè)些納米尺(chǐ)寸孔徑射出的光會嚴重發散高達幾十納米,因此必(bì)須精確控製掩模和(hé)基板之間的間隙(xì),使其維持(chí)在幾十納米之內,這對(duì)於確保工藝性能至(zhì)關重要。
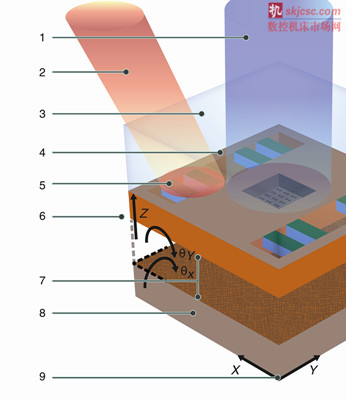
圖4:近場掃(sǎo)描光刻設備

圖5:帶蝴蝶結形孔的NSOL掩(yǎn)模(底視圖)
通過用激光依次掃過每個孔,可以直(zhí)接在(zài)基板上構建圖(tú)像。多軸壓電平(píng)台用於相對於掩模定位基板。這些平(píng)台的位置編碼器反饋需要保持(chí)在亞納米級分辨率範圍內,因此激光幹涉儀型係統更適合進行更精細的調整。傳統(tǒng)的高性能光(guāng)柵可以(yǐ)用於粗調(diào)直線電機平台的換向。
高精度運動平台的重要性
光掩模運動平台是光刻設備的核心技術之(zhī)一,這些先進的運動平台使用包(bāo)括音圈電機 (VCM) 在內的多種(zhǒng)不同類型的電機執行粗略 (>100 mm) 運動(dòng)控製(zhì)和更精細(xì) (<2 mm) 的(de)運(yùn)動控製。運動命令模式通常是“加速 — 勻速 — 減速(sù)”類型。典型的掩模平台通常具有六個(gè)自由度,要用到多根需(xū)要(yào)高精度位置反饋的驅動軸。高分辨率、高速度和低延遲的位置編碼器是動態(tài)平台定位的關鍵,因為它(tā)們可以盡(jìn)可能(néng)增加帶寬並降低不穩定性。在這些應用中,編碼器的(de)選擇至關重要。編碼器的周期誤(wù)差低,則對(duì)伺服回路的輸入負載(zǎi)幹(gàn)擾較小,從而實現更精細的速度控製。使(shǐ)用精心設計的安裝工具(例如與VIONiC配用的Advanced Diagnostic Tool (ADTi-100))妥善安裝,更可實現編碼器的最佳整體性能。
總結
先進的光柵技術可滿足光刻(kè)工藝苛刻的高精度、重複性和穩定性要求(qiú)。對於某些反饋應用,機器設計人員應考慮緊湊型先進光柵解(jiě)決方案是否能夠替代傳統的幹涉測量激光尺係統。鑒於(yú)無掩模光刻技術的進步,有朝一日可能不會再需要光掩模的多重曝光,但未來對測量性能的要求一定不會降低。
如需了解VIONiC係統的詳細信(xìn)息,請訪問www.renishaw.com.cn/vionic
投稿箱:
如果(guǒ)您有機床(chuáng)行業、企業相關新聞稿件發表(biǎo),或進行資訊合作(zuò),歡迎聯係本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果(guǒ)您有機床(chuáng)行業、企業相關新聞稿件發表(biǎo),或進行資訊合作(zuò),歡迎聯係本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業界視點
| 更多

行業數據
| 更多
- 2024年11月 金屬切削機床產量數(shù)據
- 2024年11月 分地區金屬切削機床產量數據
- 2024年11月 軸承(chéng)出口情況
- 2024年11月 基本型乘用車(轎車)產(chǎn)量數據
- 2024年(nián)11月 新能源汽車產量數據(jù)
- 2024年11月 新能源汽(qì)車銷(xiāo)量情況(kuàng)
- 2024年10月 新能源汽車產量數據
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切削機(jī)床產量數據
- 2024年10月 金屬切削機(jī)床產量數(shù)據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本型乘用車(轎車)產量數據
博文選萃
| 更(gèng)多