



一種智能(néng)化定位測量係統
2017-8-3 來源:中國(guó)飛行試驗研究院 作者(zhě):何紅麗
摘要:根據試驗測試需求(qiú),設計一種集(jí)點(diǎn)、線、麵為一體智能化高(gāo)精(jīng)度三維坐標定位測量(liàng)係統(tǒng)。該係統主要應用於飛機結構性能檢測以及工業現場標定中,具備測量仿真、在線校準、在線測量、快速處理、實時監控的功能,給(gěi)出係統構建思路、框架、組成,並對關鍵技術(shù)問題進行剖析;在實驗室利用全站儀、影(yǐng)像測量設備等搭建一個綜合測試平台,驗證了設備接(jiē)口信息互操作性、實時引導、坐標(biāo)轉換、平差處理等關鍵功能,其功能、性(xìng)能均滿足測試需求。係(xì)統的建成(chéng)將有力助推(tuī)飛行試驗智能化(huà)測(cè)試技術的發展,對提高測試精度、速(sù)度,節省人力、物(wù)力都具有非(fēi)常重要的(de)作(zuò)用。
關鍵詞:三維模型;智能測量(liàng);係統設計(jì);測量仿真
0.引(yǐn)言
飛行試(shì)驗空間(jiān)定位測量是在真實試驗環境下,對航空飛行器及附件等位(wèi)置參數進行測量[1],其主要應用於飛機結構性能檢(jiǎn)測以及工業現場標定中。近幾年來隨著數字化測量技術進入製造領域,其在測量、檢測、裝配、校準等領域發揮的作用越來越重要(yào),尤其是對於尺寸大、產品結構複雜、製造工藝要求高、生產速度要求(qiú)快(kuài)的各類型航空武器係統。在航空武器係統的(de)測量中,既(jì)要測量飛機、武器本身的位姿信息,還要測(cè)量飛機與武器之間(jiān)的(de)相互關係;測量精度要求高(gāo),測量任(rèn)務多,測量頻度高,每年(nián)測量上百架次;測量由原來的靜態轉(zhuǎn)換為(wéi)動靜結合;且隨著(zhe)科學技術的發展,測試向著數字化(huà)、綜合化、集成化、標準化、在線化等(děng)智能化方(fāng)向快速發展[2]。
要快速實現上述測量需求,智能化測試係統的研製是必然選(xuǎn)擇。沒有有效的(de)測量手段就不可能實現在線(xiàn)自動化(huà)檢測,隻有通過(guò)智(zhì)能化測試係統的構建,才可提高試飛測試精度、速度(dù),節省人力(lì)、物力。本文主要(yào)針對空間(jiān)定位測量需求,跟蹤國內外智能化測試技術發展趨勢,設計滿足未來武器發展需求的高精度空間三維點、線、麵一體化(huà)智能測量係統。該係統需具備(bèi)仿真計算、在線校準、在線測量、快速處理、實時監控的功能,可實(shí)現飛機模型構建,武(wǔ)器係統在飛機上的安裝(zhuāng)過程在線檢測、複雜體的定位及試驗現場(chǎng)監(jiān)控,為(wéi)現場測試、決策(cè)提供依據。
1.係統架構設計
1.1 基本框架
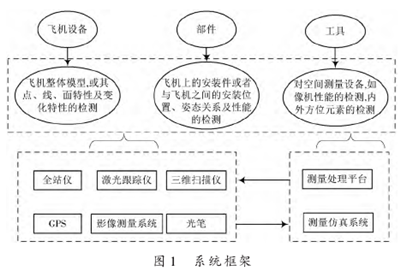
依據(jù)飛行試驗所需,采用先進的數字化測量設備如全站儀、光學坐標(biāo)測量儀、三維掃描儀、激光(guāng)跟蹤儀等多測量設備聯合作業,以期解決飛機結構性(xìng)能檢測和(hé)工業現(xiàn)場標定問(wèn)題。構建思(sī)路是基於三維模型,通過計算機、自動控製等技術,實現對被測對象的一體化測量[3];通過離線編程進行(háng)設備的布局與任務規劃(huá),係統建成後可(kě)在線檢(jiǎn)測、在現場進行數據處(chù)理,縮(suō)短處理周期,提高測量數據的有效性和準(zhǔn)確性。在測量平台(tái)構(gòu)建過程中充分(fèn)考慮係統的先進性,係統構建既要具(jù)有數據處理、操控功能,同時要能夠對測量設備布局進行優化,對(duì)測量任務軌跡(jì)線路進行規劃,在確保精度的情況下完成自動(dòng)化測量。係統框架如圖(tú) 1 所示。
1.2 係統組成
針對飛行試驗(yàn)機庫特點,構建智能化(huà)高精度定位測量係統,實現特征點、線、麵數據的快速自動化采集、記錄、計算、結果報表生(shēng)成等功能。智能測(cè)量係統主要(yào)由5 個分係統組成:精確點測量分係統、影像測量分係統、三維(wéi)建模分係統、測(cè)控中心分(fèn)係統、測量仿真分係統。其中精(jīng)確(què)點測量分係統、三維建模分係統、影像測量分係統實現信息(xī)的采集與獲取;測控(kòng)中心(xīn)分(fèn)係統是(shì)整個(gè)係統的核(hé)心,負責數據處(chù)理、操控(kòng)、引導、分析、顯示等功能;測量仿真分係統主要完成測量設(shè)備的布局、組合以及測(cè)量路徑的規劃,是進行係統優(yōu)化配置的關鍵,同時(shí)也是自動化測(cè)量(liàng)的基礎。具體組成如下:
(1)精確點測量分(fèn)係(xì)統。由全站儀、光學坐標測(cè)量儀、激光跟蹤儀等設(shè)備組成,主要實現對被測對象特征點測量。
(2)影像測量分係統。由攝像(xiàng)機、鏡頭、解析軟件等組成,利用近景攝影原理對(duì)目標關鍵(jiàn)點進行測量,可以給出靜態(tài)或動態測量過程目標(biāo)點的測量結果。
(3)三維建模(mó)分係統。包含三維掃描儀,模型構建工具等,主要用於(yú)模型構建或者是目(mù)標的測量及姿態(tài)求取。
(4)測控(kòng)中心分係統。主要實現對係(xì)統中的相機、三維激光掃描儀以及全站儀等設備(bèi)的後台操作控製和信息(xī)實時(shí)采集、引導發送、處理、評估、顯示等,具備圖像處理、數據處理、參數解析以及平差計算等功(gōng)能。
(5)測量仿真分係統。根據測(cè)量任務的要(yào)求及現場環境知識建立(lì)仿真模型,對測量(liàng)特性進行(háng)仿真計算,通過仿真給出某個(gè)特定任務中參與測量的測量設備的(de)組(zǔ)合、布局、測量任務的規劃,是係統優(yōu)化配置的關鍵。主要用於(yú)任(rèn)務的準備,模擬測量現場,對設備布局,設備幹涉、測(cè)量軌(guǐ)跡路徑的模擬,對測量方案及計劃(huá)進行確認。
1.3 軟件(jiàn)規劃
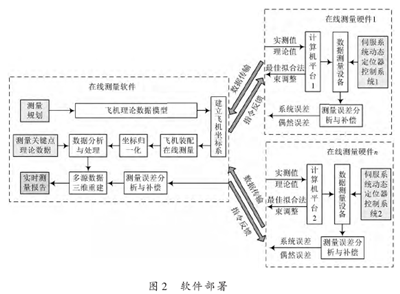
對於一項測試,要進行智能化測量,任務部署規劃很重要。首先通過測量(liàng)仿真,獲取測(cè)量規劃,然後再(zài)依據規劃進行在線化測量及結果(guǒ)報表的生成(chéng)。軟件功能的部署如圖 2 所示。
2.關鍵(jiàn)技術
2.1 聯合靶標的(de)合理設計、布置和測量
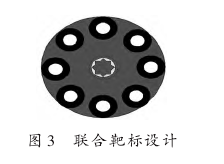
一個由多測量設備構成的綜(zōng)合測量係統要獲取(qǔ)高精度的測量結果,首先(xiān)要根據觀測對象條件來確定聯合靶標設計及布局,以確保測量體係的統一。在這一過程(chéng)中,需要充分考(kǎo)慮多種(zhǒng)測量(liàng)設備對測量標誌的識別特點,考慮測量對象的尺寸規模、標誌點的結構特點。為此進行了聯合靶標(biāo)的設計,讓所有測量設備信息可以劃歸在統一(yī)測量體係。設計(jì)的聯合靶標如圖 3 所(suǒ)示,由反(fǎn)射棱鏡和圓形回光反(fǎn)射標誌點構成,其中(zhōng)反射棱鏡可以由激光跟蹤儀(yí)或全(quán)站儀識別(bié),而圓形回光反射標誌點可以由影像測量設備、三維掃描儀識別,然後通過解析算法,依據反射棱鏡的中心把所有的測量點劃歸在(zài)同一個(gè)參(cān)考中心。要提高測量精度,在布局過程中要獲取多樣性的觀測數(shù)據。多樣性的觀測數據是(shì)其平差(chà)模型準確的基礎。在布控時考慮(lǜ)測量過程(chéng)中的盲區分布、光(guāng)學單(dān)元可(kě)利用的空間分布、光學測量係統的光源布置等。
2.2 基於模型的智能化測量流程設計
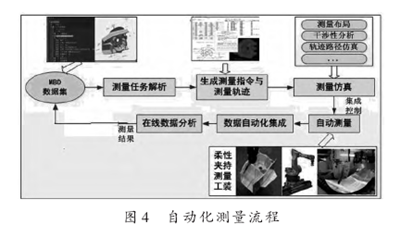
智能化測量流程設計是基於數字化三維仿真模型(xíng)[4 5]。首先對(duì)測量任務需求進行解(jiě)析。根據相關(guān)測試要求進行測量指令的生成,依據現場環境(jìng),通過測量仿真(zhēn)進(jìn)行測量設備的選取、組合與布局。根據仿真生成的測量(liàng)規(guī)劃進(jìn)行集成控製及自動化測量,在測控中心完成所有測量數據的(de)采集和計算,構建統一的坐標體係、數據解算,完成在線測量與分析,最終給出測量(liàng)結果。自動化測量流程(chéng)如圖 4 所(suǒ)示。
2.3 測量仿真
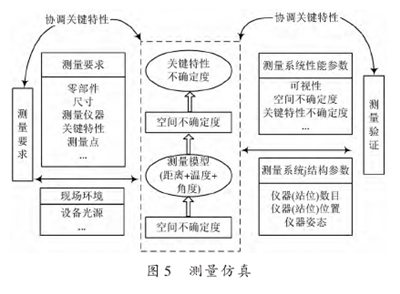
測量仿真是實現智能測量的首要條(tiáo)件,在複雜試(shì)驗現場環境下,建立合(hé)理的測量場模型是測量規劃與係統(tǒng)優化(huà)配置(zhì)的基礎和關鍵[6?7]。總體上,測量場模型要根據測量任務的要求及現(xiàn)場(chǎng)環境模型而建立,其中應包括工作空間、零部件、障礙物、測量目標、測量儀器、測量空間內的(de)環境因素等信息。對測量係統按照不同布局或(huò)配置方案組合(hé),通過仿真將形(xíng)成(chéng)不(bú)同的測量場(chǎng)結果,由此可以在現場實際測量實施之前評價測量係統(tǒng)的性能參數並得到(dào)優化的(de)結構參數,驗證測量場模型和試(shì)驗需求相符(fú)性,在仿真過程(chéng)中著重關注可視性與精度(dù)特(tè)性。測量仿真過程如圖 5 所(suǒ)示。
2.4 自動化測量過程
自動測量(liàng)用到的設備有跟(gēn)蹤設(shè)備(跟蹤儀,全(quán)站(zhàn)儀),采用“坐標(biāo)值轉換設備自動驅動自動找點數據采集”的(de)方式實(shí)現自動瞄(miáo)準測量[8]。首先(xiān)基於三(sān)維數/模獲取各測(cè)量點在設計坐標係下的理論位置,計算設計坐標係與測量坐(zuò)標係(xì)的轉換關係,獲得當(dāng)前實際狀(zhuàng)態下各個測點在(zài)測量坐標係下的理論坐標值,通過程序控製測(cè)量設備自動定位到要采集的測量點附近,使(shǐ)跟蹤儀自動精確(què)搜尋到靶球靶(bǎ)心,完(wán)成測量,然後進入下一個所需點的搜索並測量。
3.驗證
利用全站儀、影像測量(liàng)係統等組建了(le)一個綜合測量(liàng)平(píng)台,通(tōng)過該係統驗證(zhèng)了實時引導、坐標(biāo)轉 換 、平(píng) 差 處 理 等 關 鍵 功 能 。 利 用 開 發 的(de) 軟件可穩定操控設備進(jìn)行測量、融合精度優於單獨設備精度(dù);測量(liàng)範圍得(dé)到拓展。同時在多個型號測試驗證了(le)多測量設備組合自動化(huà)測量模式,實現了在線測量,提高工作效率與測量的可靠(kào)性。
4.結(jié)語
采用多測量(liàng)設備可以構建大(dà)尺寸智能化定位(wèi)測(cè)量(liàng)係統,該(gāi)係統(tǒng)建成之後(hòu),可以實現常規任務在線快速測量。智能化(huà)測量是一個係統工程(chéng),要達到(dào)智能化測試目標,需要統籌規劃、補點(diǎn)建線構麵、逐步實施。中國飛行(háng)試驗研(yán)究院按照此思路正在開展智能化測(cè)試工作的逐步推進,係統的建成(chéng)將有力(lì)助推飛行試驗智能化測試技(jì)術的(de)發展,對提高測試(shì)精(jīng)度和(hé)測量速(sù)度,節省人力(lì)、物(wù)力都具有非常重要(yào)的作用。
投稿(gǎo)箱:
如果您有機床行業、企業(yè)相關新聞稿(gǎo)件發表,或進行資訊(xùn)合作,歡迎聯(lián)係本網編(biān)輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業(yè)相關新聞稿(gǎo)件發表,或進行資訊(xùn)合作,歡迎聯(lián)係本網編(biān)輯部, 郵箱:skjcsc@vip.sina.com
更多相關信(xìn)息

業界視點
| 更(gèng)多

行業數據(jù)
| 更多
- 2024年11月 金屬切削機床產量數據
- 2024年11月(yuè) 分地區金屬切(qiē)削機床產量數據
- 2024年11月(yuè) 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源汽(qì)車銷量情況
- 2024年10月 新能源(yuán)汽車產量數據
- 2024年10月 軸承出(chū)口(kǒu)情況
- 2024年10月 分地區(qū)金(jīn)屬切削機床產量數(shù)據
- 2024年10月 金屬切削機(jī)床產量數據
- 2024年9月(yuè) 新能源(yuán)汽車(chē)銷量(liàng)情況
- 2024年8月 新能(néng)源汽車產量數據
- 2028年8月 基本型乘用車(轎(jiào)車)產量數(shù)據
博文選萃
| 更多(duō)